
技术摘要:
本申请提出一种落点位置确定方法、装置、计算设备及可读存储介质,涉及数据处理领域。首先根据3个目标震动传感器各自测得的目标震动信号,确定落点处的震动传递到各目标震动传感器的时间;然后基于得到的3个时间计算得到两个实际时间差,一个实际时间差表示落点处的震 全部
背景技术:
在一些特殊场景中,会需要确定落点位置。比如,在室外篮球以及其他篮球类游戏 等中,常常需要对人员或球的落点进行判断。目前针对这种需求,都是在场地的各个检测点 预埋压力传感器或电容式检测传感器;哪个传感器被触发,就确定哪个传感器所在的检测 点的位置作为落点位置。由于设置较多传感器会导致成本较高,因此一般设置的传感器都 较少。由此确定出的落点位置的精确度不高。
技术实现要素:
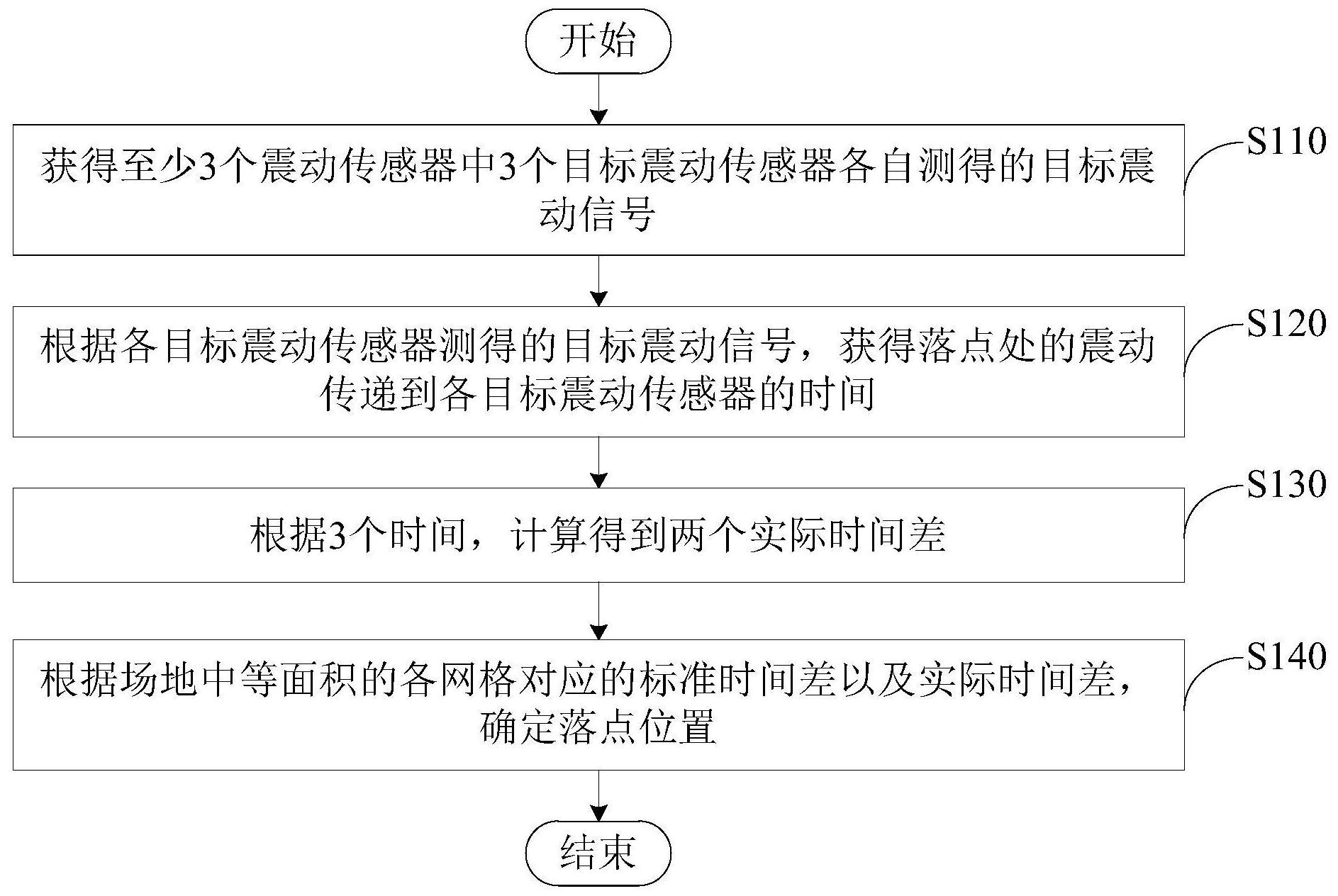
有鉴于此,本申请的目的在于提供一种落点位置确定方法、装置、电子设备及可读 存储介质,其能够利用震动传感器获得场地中的震动信号,并根据该震动信号获得落点处 震动传递到震动传感器的时间,进而基于时间确定落点位置,并且具有精度高的特点。 为了实现上述目的,本申请实施例采用的技术方案如下: 第一方面,本申请实施例提供一种落点位置确定方法,应用于计算设备,所述计算 设备与设置在场地预设范围内的至少3个震动传感器通信连接,所述方法包括: 获得所述至少3个震动传感器中3个目标震动传感器各自测得的目标震动信号; 根据各目标震动传感器测得的目标震动信号,获得落点处的震动传递到各目标震 动传感器的时间; 根据3个所述时间,计算得到两个实际时间差,其中,一个实际时间差表示落点处 的震动传递到两个目标震动传感器的时间之差; 根据场地中等面积的各网格对应的标准时间差以及所述实际时间差,确定落点位 置,其中,一个网格对应的标准时间差表示,在该网格处发生震动时,该网格处的震动传递 到所述两个目标震动传感器的时间之差。 在可选的实施方式中,所述网格的面积小于预设面积,所述根据场地中等面积的 各网格对应的两个标准时间差以及所述两个实际时间差,确定落点位置,包括: 针对每个网格,分别计算该网格对应的差值和,其中,一个网格对应的差值和,表 示针对该网格,两个各自对应相同的两个目标震动传感器的实际时间差与标准时间差的差 值的绝对值之和; 将场地中各网格对应的差值和进行比较,得到比较结果; 根据比较结果,将最小差值和对应的网格的位置作为所述落点位置。 在可选的实施方式中,各网格对应的标准时间差包括第一网格对应的第一标准时 间差以及第二网格对应的第二标准时间差,所述第一网格的面积大于所述第二网格的面 积,所述根据场地中等面积的各网格对应的两个标准时间差以及所述两个实际时间差,确 5 CN 111603749 A 说 明 书 2/10 页 定落点位置,包括: 针对每个第一网格,分别计算该第一网格对应的第一差值和,其中,一个第一网格 对应的第一差值和,表示针对该第一网格,两个各自对应相同的两个目标震动传感器的实 际时间差与第一标准时间差的差值的绝对值之和; 将场地中各第一网格对应的第一差值和进行比较,得到比较结果; 根据比较结果,将最小第一差值和对应的第一网格作为目标网格; 根据所述目标网格确定目标范围; 根据所述目标范围内等面积的各第二网格对应的两个第二标准时间差,以确定所 述目标网格的方式,计算得到各第二网格对应的第二差值和; 将最小第二差值和对应的第二网格的位置作为所述落点位置。 在可选的实施方式中,所述根据各目标震动传感器测得的目标震动信号,获得落 点处的震动传递到各目标震动传感器的时间,包括: 对目标震动信号进行信号放大、降噪以及带通滤波处理,得到预处理后的目标震 动信号; 根据预设振幅对所述预处理后的目标震动信号进行过滤处理,得到过滤后的目标 震动信号; 计算过滤后的目标震动信号的拐点,将所述拐点对应的时间作为落点处的震动传 递到目标震动传感器的时间。 第二方面,本申请实施例提供一种落点位置确定方法,应用于计算设备,所述计算 设备与设置在场地预设范围内的至少3个震动传感器通信连接,所述方法包括: 获得所述至少3个震动传感器中3个目标震动传感器各自测得的目标震动信号; 根据各目标震动传感器测得的目标震动信号,获得落点处的震动传递到各目标震 动传感器的时间; 根据3个所述时间,计算得到两个实际时间差,其中,一个实际时间差表示落点处 的震动传递到两个目标震动传感器的时间之差; 根据各目标震动传感器的位置以及所述两个实际时间差,确定落点位置。 在可选的实施方式中,所述根据各目标震动传感器的位置以及所述两个实际时间 差,确定落点位置,包括: 根据3个目标震动传感器的位置以及所述两个实际时间差,构建两个双曲线方程; 根据所述实际时间差,确定每个双曲线方程所对应的双曲线中的其中一条曲线作 为目标曲线; 计算两个目标曲线的交点位置,作为所述落点位置。 第三方面,本申请实施例提供一种落点位置确定装置,应用于计算设备,所述计算 设备与设置在场地预设范围内的至少3个震动传感器通信连接,所述装置包括: 获得模块,用于获得所述至少3个震动传感器中3个目标震动传感器各自测得的目 标震动信号; 第一处理模块,用于根据各目标震动传感器测得的目标震动信号,获得落点处的 震动传递到各目标震动传感器的时间; 第二处理模块,用于根据3个所述时间,计算得到两个实际时间差,其中,一个实际 6 CN 111603749 A 说 明 书 3/10 页 时间差表示落点处的震动传递到两个目标震动传感器的时间之差; 确定模块,用于根据场地中等面积的各网格对应的标准时间差以及所述实际时间 差,确定落点位置,其中,一个网格对应的标准时间差表示,在该网格处发生震动时,该网格 处的震动传递到所述两个目标震动传感器的时间之差。 在可选的实施方式中,各网格对应的标准时间差包括第一网格对应的第一标准时 间差以及第二网格对应的第二标准时间差,所述第一网格的面积大于所述第二网格的面 积,所述确定模块具体用于: 针对每个第一网格,分别计算该第一网格对应的第一差值和,其中,一个第一网格 对应的第一差值和,表示针对该第一网格,两个各自对应相同的两个目标震动传感器的实 际时间差与第一标准时间差的差值的绝对值之和; 将场地中各第一网格对应的第一差值和进行比较,得到比较结果; 根据比较结果,将最小第一差值和对应的第一网格作为目标网格; 根据所述目标网格确定目标范围; 根据所述目标范围内等面积的各第二网格对应的两个第二标准时间差,以确定所 述目标网格的方式,计算得到各第二网格对应的第二差值和; 将最小第二差值和对应的第二网格的位置作为所述落点位置。 第四方面,本申请实施例提供一种计算设备,包括处理器和存储器,所述存储器存 储有能够被所述处理器执行的机器可执行指令,所述处理器可执行所述机器可执行指令以 实现前述实施方式中任意一项所述的落点位置确定方法。 第五方面,本申请实施例提供一种可读存储介质,其上存储有计算机程序,所述计 算机程序被处理器执行时实现如前述实施方式中任意一项所述的落点位置确定方法。 本申请实施例提供的落点位置确定方法、装置、电子设备及可读存储介质,首先根 据3个目标震动传感器各自测得的目标震动信号,确定落点处的震动传递到各目标震动传 感器的时间;然后基于得到的3个时间计算得到两个实际时间差,一个实际时间差表示落点 处的震动传递到两个目标震动传感器的时间之差;最后根据场地中等面积的各网格对应的 标准时间差以及得到的两个实际时间差,确定落点位置,一个网格对应的标准时间差表示, 在该网格处发生震动时,该网格处的震动传递到所述两个目标震动传感器的时间之差。由 此,不需要预埋压力传感器或电容式检测传感器,而是利用震动传感器测得震动信号,进而 基于震动信号确定出落点位置,该方式具有落点位置的精确度高以及成本低等特点。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对实施例中所需要使用的附 图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看作是对 范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这 些附图获得其他相关的附图。 图1是本申请实施例提供的计算设备的方框示意图; 图2是本申请实施例提供的落点位置确定方法的流程示意图之一; 图3是本申请实施例提供的落点位置确定方法的流程示意图之二; 图4是本申请实施例提供的落点位置确定装置的方框示意图。 7 CN 111603749 A 说 明 书 4/10 页 图标:100-计算设备;110-存储器;120-处理器;130-通信单元;200-落点位置确定 装置;210-获得模块;220-第一处理模块;230-第二处理模块;240-确定模块。











