
技术摘要:
本发明涉及一种基于AE‑LSTM‑BO车流量预测的导航参考方法,首先构建和训练自编码器‑长短时记忆网络模型,然后将当前路口历史数据和周围路口历史数据输入到自编码器‑长短时记忆网络模型中,由其输出未来一定时间段内当前路口的车流量,最后将所预测的车流量结果发布 全部
背景技术:
随着经济的发展,私家车的数量越来越多,这给城市的交通带来了十分严重的问 题。为解决该难题,智能交通系统应运而生。交通流预测是智能交通系统中很重要的一个环 节,实时性和正确率更好的短时预测模型有助于对交通状况的分析和控制。目前的导航提 醒方法是以当前时间道路交通流为参考,然而当需要长时间通行时,会出现某条道路在出 行规划时不拥堵但行驶到时发生重大拥堵的情况。故需要在对出行路线进行规划时,就将 未来一段时间内的交通情况作为参考,提供更为精准畅通的出行路线。 由于大数据技术的发展,用数据驱动的预测模型在实验中已被证明有着更好的正 确率。循环神经网络(Recurrent Neural Network,RNN)是一类以序列数据为输入,在序列 的演进方向进行递归且所有节点(循环单元)按链式连接的递归神经网络。 自编码器(Auto Encoder,AE)是一类在半监督学习和非监督学习中使用的人工神 经网络,其功能是通过将输入信息作为学习目标,对输入信息进行表征学习。AE分为编码器 和解码器,编码器可以将周围路口的车流量进行特征提取,降低数据的维度,解码器将降维 后的特征解码成数据传入LSTM中进行预测,是一种非线性的降维手段,效果比线性降维主 成分分析(PCA)要好很多。 长短时记忆网络(Long Short Term Memory,LSTM)可以弥补循环神经网络中出现 的梯度消失和梯度爆炸问题,因此在短期交通流预测中得到广泛应用。LSTM在RNN的基础 上,增加了遗忘门(forget gate)和输入门(input gate),遗忘门对上一个节点传进来的输 入进行选择性忘记,输入门将这个阶段的输入有选择性地进行“记忆”。这种通过门控状态 来控制传输状态,使模型能够记住需要长时间记忆的,忘记不重要的信息,并消除梯度下降 和梯度消失现象。 贝叶斯优化(Bayesian Optimazation)可以在不知道目标函数(黑箱函数)长什么 样子的情况下,通过猜测黑箱函数长什么样,来求一个可接受的最大值。LSTM中的超参数直 接影响预测的结果,一般情况下,由于神经网络的黑盒性质,超参数的调整都是由程序员根 据经验来反复尝试以选取使效果最优的那一组,因此会存在结果并不是最优的情况。因此, 通过贝叶斯优化,定量的整定LSTM网络中的超参数,达到更好的预测效果。 目前的车流量预测都是针对当前路口,仅仅将当前路口的历史数据作为训练集来 给神经网络进行训练,然而交通路口的车流量与周围路口的车流量有着密切的关系,因此 周围路口的车流量情况也应该考虑到预测模型之中。已有的交通量预测模型仅仅考虑了当 前路口的历史数据,这在道路的拓扑模型上是全面的,需要将相关联道路的情况以一定的 权重加入到分析中,而将周围路口的历史数据引入后,会发现由于训练集中的维度过高,会 使学习出来的神经网络发生过拟合现象,导致神经网络的泛化性能降低,因此需要将训练 5 CN 111553535 A 说 明 书 2/7 页 集中的数据进行降维处理。
技术实现要素:
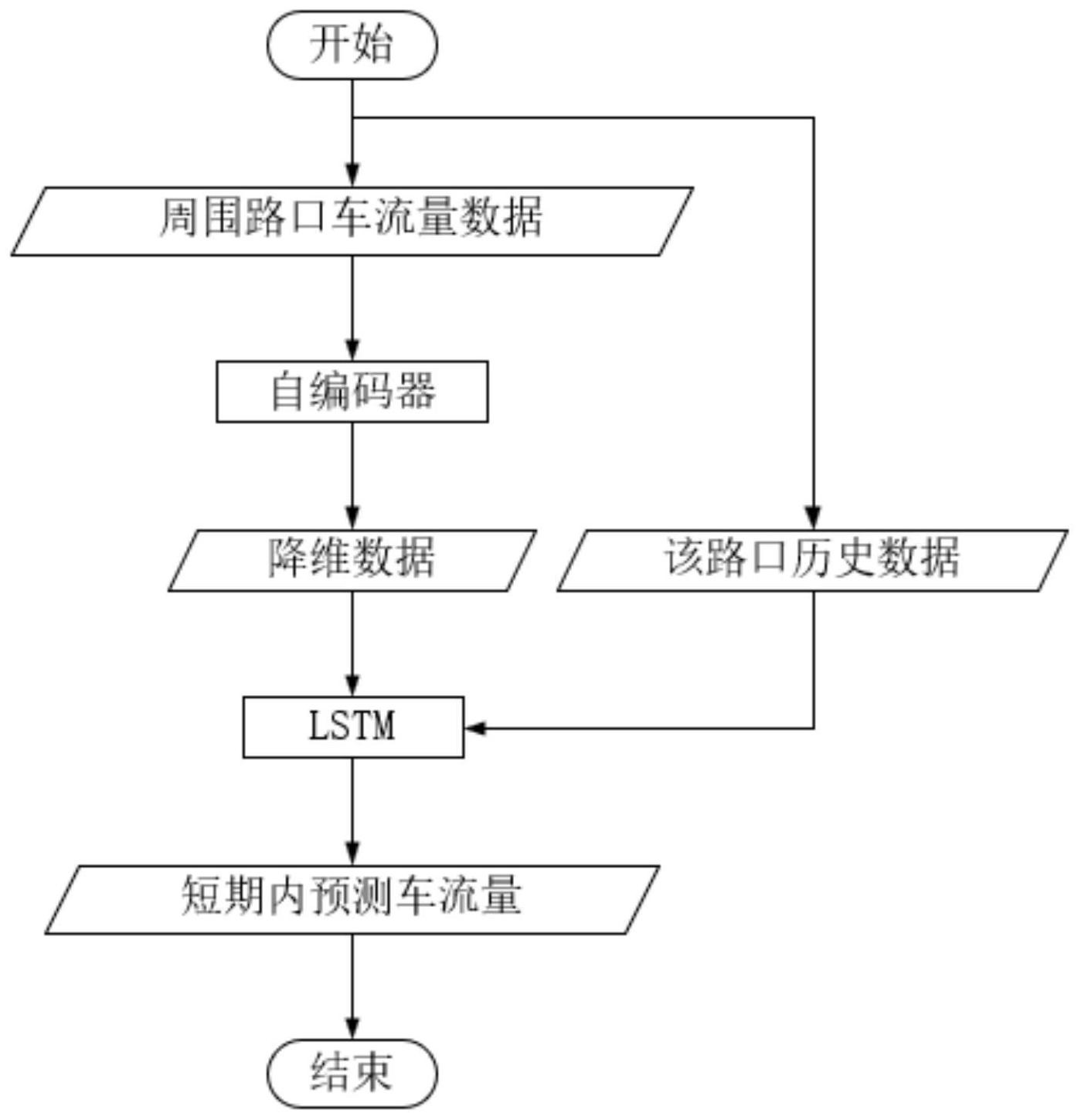
本发明的目的是解决现有技术中存在的问题,提供一种基于AE-LSTM-BO车流量预 测的导航参考方法。本发明通过自编码器(AE)将周围相关路口的历史数据降维,引入到当 前路口的数据集中,再以LSTM网络进行预测的车流量回归算法,最后使用贝叶斯优化(BO) 调整LSTM中的超参数,提高交通流预测的准确性。 为达到上述目的,本发明采用的技术方案如下: 一种基于AE-LSTM-BO车流量预测的导航参考方法,首先构建和训练自编码器-长 短时记忆网络模型,然后将当前路口历史数据和周围路口历史数据输入到自编码器-长短 时记忆网络模型中,由其输出未来一定时间段内当前路口的车流量,最后将所预测的车流 量结果发布在导航app上,让导航app或司机能够根据不同颜色展示的交通流量参考道路的 拥堵性,以此合理规划出行,选择导航路线; 自编码器-长短时记忆网络模型的构建步骤如下: (1)降维周围路口历史数据; 将周围路口历史数据输入到自编码器中,由其输出降维后的相关度最大的数据; (2)LSTM网络预测未来一定时间段内当前路口的车流量; 将(1)中得到的相关度最大的数据和当前路口历史数据输入到LSTM网络中,由其 输出未来一定时间段内当前路口的车流量的预测值,即得到自编码器-长短时记忆网络模 型; 自编码器-长短时记忆网络模型的训练步骤如下: (1)获取历史数据; 获取用于车流量预测的训练集,包括当前路口历史数据和周围路口历史数据,其 中,历史数据以小时为单位分段; (2)自编码器的训练; (2 .1)记周围路口历史数据为X,X包含了上游路口车流量xui和下游路口车流量 xdi,记特征序列为Z,重组数据为Y,则: zi=f[wz·(xui xdi) bz]; yi=f(wy·zi by); 式中,i为历史数据中各个时间段的索引,zi为Z中的各个时间段的特征序列,yi为Y 中的各个时间段的重组数据,f(·)为sigmoid函数,wz为编码器的权重,wy为解码器的权重, bz为编码器的偏置,by为解码器的偏置; (2.2)调节参数wz、wy、bz、by,至解码器的输出与编码器的输入的偏差最小; (2.3)重新计算zi; (3)LTM网络的训练; (3.1)LSTM网络根据当前路口历史数据xi和zi计算得到预测数据 (3.2)以当前路口历史数据中第k-1-p至第k-1个时间段的数据为输入同时以第k 至k q个时间段的数据为理论输出训练LSTM网络,训练过程中不断调节参数,即LSTM网络的 权值和偏置,至LSTM网络的预测数据 与真实数据xi的偏差最小; 6 CN 111553535 A 说 明 书 3/7 页 (4)贝叶斯优化调整超参数; 贝叶斯优化的算法流程以黑箱函数target、自变量取值范围x和可接受的因变量 取值范围G为输入,以贝叶斯优化器预测的xnew和预测的最大的函数值target(xnew)为输出, 令target为LSTM的预测数据,x为包含神经网络的学习率、epoch、batch、size和神经元的数 量在内的超参数,G为目标置信率(本发明将目标置信率设置为0.95),过若干轮迭代之后就 能得到目标置信率对应的超参数取值xnew和在该超参数取值下好的预测值target(xnew)(超 参数是模型固有参数,在搭建模型时由编程人员经验设置,超参数的好坏直接影响模型的 性能,故用贝叶斯优化超参数。),即完成自编码器-长短时记忆网络模型的训练。 作为优选的技术方案: 如上所述的一种基于AE-LSTM-BO车流量预测的导航参考方法,步骤(2.2)和步骤 (3.2)中调节参数采用反向传播和梯度下降算法,本发明的保护范围不限于此,其他算法同 样可用于调节参数,鉴于反向传播和梯度下降算法最为经典,因而作为本发明的优选。 如上所述的一种基于AE-LSTM-BO车流量预测的导航参考方法,步骤(2.2)具体如 下: 调节参数wz、wy、bz、by至L(X,Y)取最小值,L(X,Y)为X和Y之间的距离,L(X,Y)的计 算公式如下: 式中,n为时间段的总数; L(X,Y)取最小值时,解码器输出yi与编码器输入xui xdi足够接近,自编码器状态稳 定,可用于LSTM网络中进行预测。 如上所述的一种基于AE-LSTM-BO车流量预测的导航参考方法,步骤(3.1)具体如 下: LSTM网络根据当前路口历史数据xi和zi计算得到预测数据 公式如下: fi=σ(wf1·xi wf2·zi wf3·hi-1 bf); ii=σ(wi1·xi wi2·zi wi3·hi-1 bi); 式中,ii为输入门,fi为遗忘门,hi-1为LSTM单元上个时刻的状态, 为神经元的输 入,Ci为神经元当前时刻的状态, 为 中各个时间段的LSTM输出门的输出,hi为LSTM的最 终状态,σ(x)=1/1 e-x,tanh(x)=ex-e-x/ex e-x,wf1为遗忘门当前路口历史数据xi的权值, wf2为遗忘门上下流车流量特征zi的权值,wf3为遗忘门LSTM单元上个时刻的状态的权值,wi1 为输入门当前路口历史数据xi的权值,wi2为输入门上下流车流量特征zi的权值,wi3为输入 门LSTM单元上个时刻的状态的权值,wC1为神经元当前时刻当前路口历史数据xi的权值,wC2 7 CN 111553535 A 说 明 书 4/7 页 为神经元当前时刻上下流车流量特征zi的权值,wC3为神经元当前时刻LSTM单元上个时刻的 状态的权值,wo1为输出门当前路口历史数据xi的权值,wo2为输出门上下流车流量特征zi的 权值,wo3为输出门LSTM单元上个时刻的状态的权值,bf,bi,bcbo分别为遗忘门、输入门、神经 元和输出门的偏置。 如上所述的一种基于AE-LSTM-BO车流量预测的导航参考方法,步骤(3.2)具体如 下: 调节参数wf1、wf2、wf3、wil、wi2、wi3、wC1、wC2、wC3、wo1、wo2、wo3和bf,bi,bcbo至 取 最小值, 的计算公式如下: 如上所述的一种基于AE-LSTM-BO车流量预测的导航参考方法,当出现数据缺失 时,采用相邻数据取平均值的方法进行缺失数据处理: 其中,xt为缺失时间段的数据,xt-1和xt 1分别为上一时间段和下一时间段的数据。 如上所述的一种基于AE-LSTM-BO车流量预测的导航参考方法,步骤(3)还包括 (3.3):计算误差,分析结果,具体为:计算预测数据 与当前路口历史数据xi间的平均绝对 百分比误差MAPE和均方根误差RMSE,公式如下: 有益效果: (1)本发明采用自编码器-解码器对周围路口的车流量数据进行降维,提取出相关 性最大的数据进行预测,将周围路口的相关数据提取出来,增加预测的精度; (2)本发明采用LSTM神经网络,结合当前路口历史数据和周围路口历史数据对未 来的车流量进行预测; (3)本发明采用贝叶斯优化,对LSTM中的超参数进行优化,进一步提升预测的准确 率。 附图说明 图1为本发明的一种基于AE-LSTM-BO车流量预测的导航参考方法的流程图; 图2为自编码器-长短时记忆网络模型的示意图; 图3为LSTM网络的示意图。 8 CN 111553535 A 说 明 书 5/7 页











