
技术摘要:
本发明涉及一种基于标定区块对靶校正的农田测亩方法及系统,包括:获取RTK测量系统测量的每个标定板中心的经纬度坐标;获取拍摄终端拍摄的多张图像;根据每个标定板中心的经纬度坐标和多张图像确定待测农田图像;根据拍摄终端确定每个像素点对地面积,记为像素点面积; 全部
背景技术:
监测作物的种植面积历来受到了高度重视,通过监测种植面积能够及时地了解并 准确地掌握粮食作物种植面积等信息。同时,粮食作物种植信息的及时获取可为制定农业 生产政策提供科学依据,这对于确保粮食安全具有非常重要的意义。在农业生产中,作物面 积和产量的及时准确预测,也能为农民每年和下一年更好地实施农作物管理具有重要意 义,特别是在农作物保险、收获计划、仓储需求、现金流预算、营养、农药、水投入等方面。传 统的作物面积测量方法主要是依靠使用卷尺等测量,从实地测量作物种植田块各边界长 度,再使用几何面积计算方法计算得出,劳动强度大、成本高且主观性强,测量精确度低。 随着科技的快速发展,对于面积测量的成本和面积测量结果的精度有了进一步要 求,因此,如何改善作物种植面积测量手段是当前亟需解决的问题。
技术实现要素:
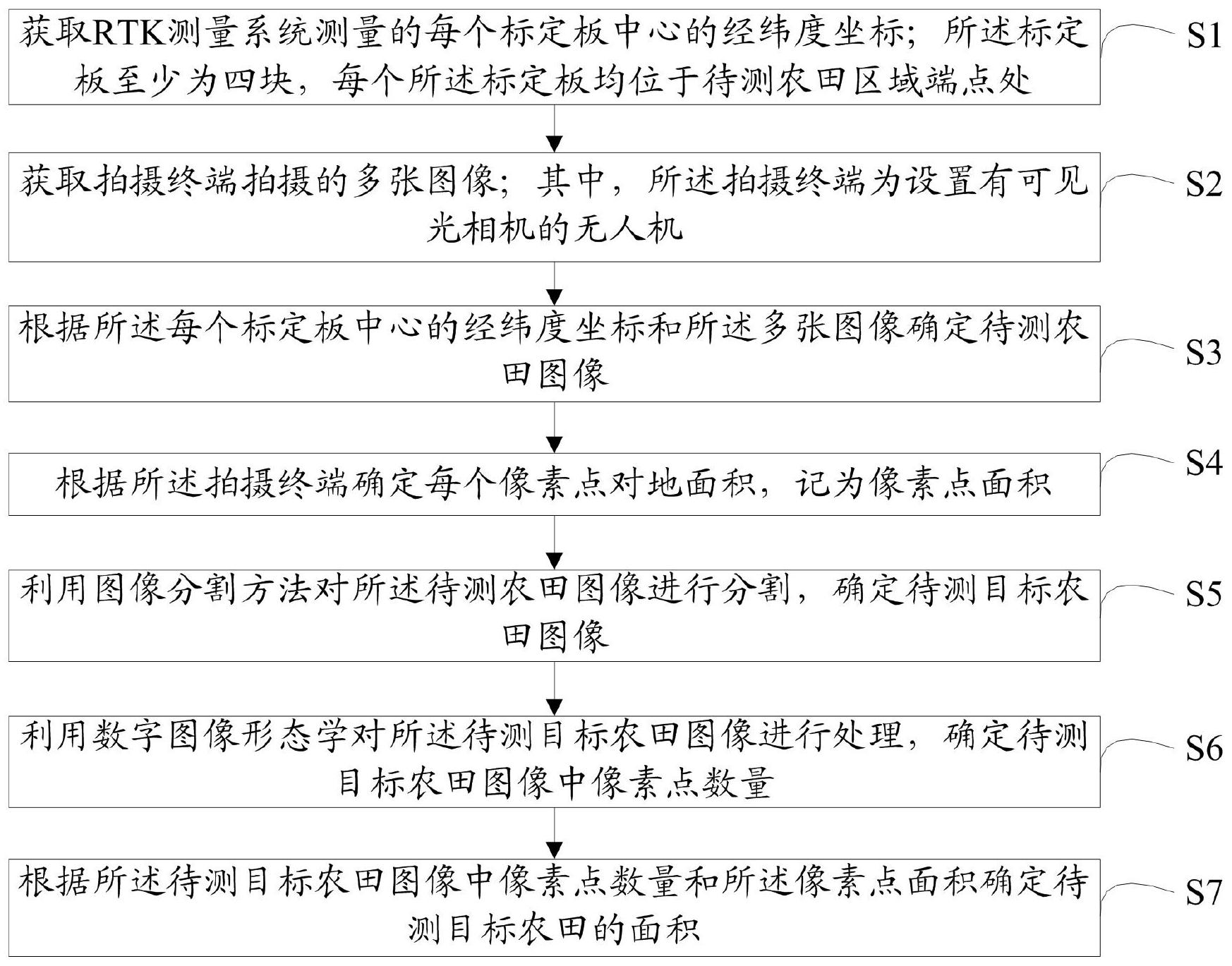
本发明的目的是提供一种基于标定区块对靶校正的农田测亩方法及系统,能够精 确的测量农田面积,降低测量成本。 为实现上述目的,本发明提供了如下方案: 一种基于标定区块对靶校正的农田测亩方法,所述农田测亩方法包括: 获取RTK测量系统测量的每个标定板中心的经纬度坐标;所述标定板至少为四块, 每个所述标定板均位于待测农田区域端点处; 获取拍摄终端拍摄的多张图像;其中,所述拍摄终端为设置有可见光相机的无人 机; 根据所述每个标定板中心的经纬度坐标和所述多张图像确定待测农田图像; 根据所述拍摄终端确定每个像素点对地面积,记为像素点面积; 利用图像分割方法对所述待测农田图像进行分割,确定待测目标农田图像; 利用数字图像形态学对所述待测目标农田图像进行处理,确定待测目标农田图像 中像素点数量; 根据所述待测目标农田图像中像素点数量和所述像素点面积确定待测目标农田 的面积。 可选的,所述获取RTK测量系统测量的每个标定板中心的经纬度坐标,具体包括: 在待测农田旁固定设置RTK基准站,将RTK流动站分别移动到各所述标定板的中 心,确定每个标定板中心的经纬度坐标;其中,所述RTK测量系统包括所述RTK基准站和所述 RTK流动站。 可选的,所述根据所述每个标定板中心的经纬度坐标和所述多张图像确定待测农 4 CN 111598937 A 说 明 书 2/7 页 田图像,具体包括: 采用三维模型生成软件对所述多张图像进行拼接,得到拼接农田完整图像;所述 拼接农田完整图像中包括至少四块标定板; 根据所述每个标定板中心的经纬度坐标对所述拼接农田完整图像进行畸变校正, 得到待测农田图像。 可选的,所述根据所述拍摄终端确定每个像素点对地面积,记为像素点面积,具体 包括: 根据公式 确定每个像素点对地面积; 其中,S0为像素点面积,a*b为可见光相机传感器的尺寸,c*d为可见光相机最大分 辨率,h为无人机的飞行高度,f为可见光相机的焦距。 可选的,所述根据所述待测目标农田图像中像素点数量和所述像素点面积确定待 测目标农田的面积,具体包括: 根据公式S田=S0·L确定待测目标农田的面积; 其中,S0为像素点面积,L为待测目标农田图像中像素点数量,S田为待测目标农田 的面积。 一种基于标定区块对靶校正的农田测亩系统,所述农田测亩系统包括: 经纬度坐标获取模块,用于获取RTK测量系统测量的每个标定板中心的经纬度坐 标;所述标定板至少为四块,每个所述标定板均位于待测农田区域端点处; 多张图像获得模块,用于获取拍摄终端拍摄的多张图像;其中,所述拍摄终端为设 置有可见光相机的无人机; 待测农田图像确定模块,用于根据所述每个标定板中心的经纬度坐标和所述多张 图像确定待测农田图像; 像素点面积确定模块,用于根据所述拍摄终端确定每个像素点对地面积,记为像 素点面积; 待测目标农田图像确定模块,用于利用图像分割方法对所述待测农田图像进行分 割,确定待测目标农田图像; 待测目标农田图像中像素点数量确定模块,用于利用数字图像形态学对所述待测 目标农田图像进行处理,确定待测目标农田图像中像素点数量; 待测目标农田面积确定模块,用于根据所述待测目标农田图像中像素点数量和所 述像素点面积确定待测目标农田的面积。 可选的,所述经纬度坐标获取模块具体包括: 经纬度坐标确定单元,用于在待测农田旁固定设置RTK基准站,将RTK流动站分别 移动到各所述标定板的中心,确定每个标定板中心的经纬度坐标;其中,所述RTK测量系统 包括所述RTK基准站和所述RTK流动站。 可选的,所述待测农田图像确定模块具体包括: 拼接农田完整图像获得单元,用于采用三维模型生成软件对所述多张图像进行拼 接,得到拼接农田完整图像;所述拼接农田完整图像中包括至少四块标定板; 待测农田图像确定单元,用于根据所述每个标定板中心的经纬度坐标对所述拼接 5 CN 111598937 A 说 明 书 3/7 页 农田完整图像进行畸变校正,得到待测农田图像。 可选的,所述像素点面积确定模块具体包括: 像素点面积确定单元,用于根据公式 确定每个像素点对地面积; 其中,S0为像素点面积,a*b为可见光相机传感器的尺寸,c*d为可见光相机最大分 辨率,h为无人机的飞行高度,f为可见光相机的焦距。 可选的,所述待测目标农田面积确定模块具体包括: 待测目标农田面积确定单元,用于根据公式S田=S0·L确定待测目标农田的面积; 其中,S0为像素点面积,L为待测目标农田图像中像素点数量,S田为待测目标农田 的面积。 根据本发明提供的具体实施例,本发明公开了以下技术效果: 本发明提供了一种基于标定区块对靶校正的农田测亩方法及系统,在待测农田中 放置至少四块标定板,获取RTK测量系统测量的每个标定板中心的经纬度坐标,然后利用每 个标定板中心的经纬度坐标对图像进行畸变校正,获得待测农田图像,最后利用校正的待 测农田图像确定待测目标农田的面积,解决了现有技术中测量农田面积精确度低的问题, 通过本发明的方法和系统能够实现对农田面积精确的测量,且测量成本低。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图 获得其他的附图。 图1为本发明实施例所提供的一种基于标定区块对靶校正的农田测亩方法的流程 图; 图2为本发明实施例所提供的标定板放置位置示意图; 图3为本发明实施例所提供的标定板示意图; 图4为本发明实施例所提供的一种基于标定区块对靶校正的农田测亩系统的结构 示意图。











