
技术摘要:
本发明公开了一种纤维缠绕用触敏机械臂,包括机械臂本体,所述的机械臂本体上包覆有电子触觉皮肤,所述的电子触觉皮肤包括皮肤薄膜和嵌设于皮肤薄膜内的若干触觉传感单元,所述的触觉传感单元包括两层柔性极板,所述两柔性极板之间设有复合介质层,柔性极板上均嵌设有 全部
背景技术:
传动的纤维缠绕机受轴数影响,只能对轴对称制品进行缠绕工作,随着纤维缠绕 复合制品日趋复杂化、异型化发展,基于机器人技术的数控缠绕系统开始出现并迅速爆发 了巨大的市场需求。在现有技术中,由于纤维所能承受的拉力上限较低,因而机器人在进行 纤维缠绕时易因缺少触觉反馈而导致纤维受力过大被拉断,进而造成损失。
技术实现要素:
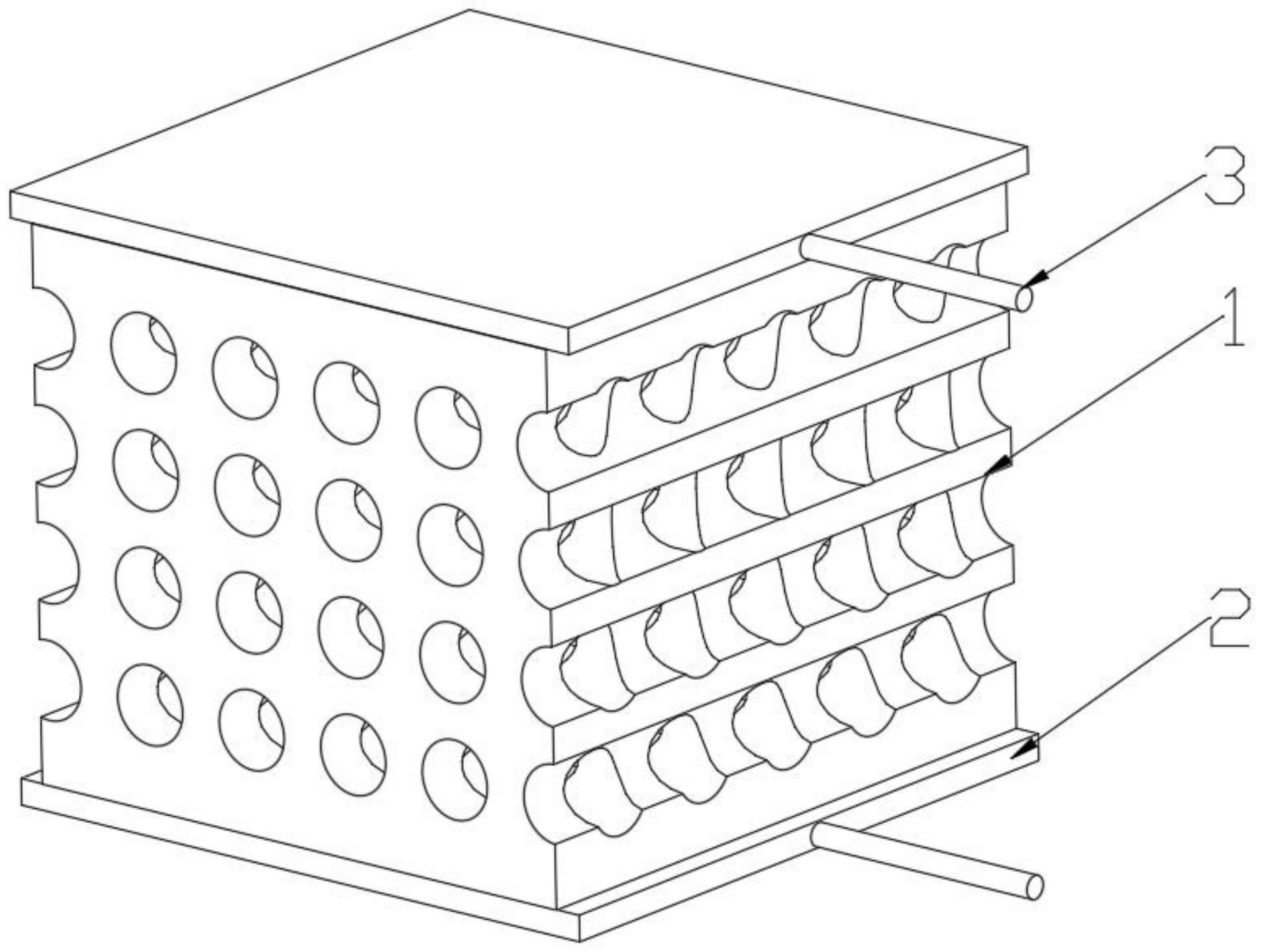
本发明的目的是为了解决以上现有技术的不足,提出了一种纤维缠绕用触敏机械 臂,包括机械臂本体,所述的机械臂本体上包覆有电子触觉皮肤,所述的电子触觉皮肤包括 皮肤薄膜和嵌设于皮肤薄膜内的若干触觉传感单元,所述的触觉传感单元包括两层柔性极 板,所述两柔性极板之间设有复合介质层,柔性极板上均嵌设有电极引线,所述的柔性极板 为YC-02型导电银胶制备,所述的复合介质层制备工艺如下: 步骤一:称取一定量的石墨烯和多壁碳纳米管,依次分散于石脑油溶剂中,通过超 声波分散1小时,磁力搅拌1小时后,获得悬浮液,在悬浮液中加入一定量的硅橡胶,磁力搅 拌1小时,获得均匀分散的复合导电溶液; 步骤二:利用去离子水对聚氨酯海绵进行预处理,除去聚氨酯海绵表面的杂质,并 剪裁成触觉传感单元所需尺寸,将预处理后的聚氨酯三维骨架浸入复合导电溶液中,将复 合导电溶液中的导电材料通过层层浸渍包裹的方法附着于聚氨酯三维骨架的表面,置于80 ℃温度箱中30分钟固化处理,使聚氨酯三维骨架结构表面均匀包裹复合导电材料; 步骤三:重复步骤二至复合介质层形成触觉传感单元所需的导电性。 优选地,所述复合介质层的上下表面设置有柔性隔离层。 优选地,所述柔性极板的外下表面通过柔性保护层封装。 优选地,所述的柔性隔离层和柔性保护层均以PDMS为基材制得。 优选地,所述的柔性极板均为铜电极。 优选地,所述的电极引线与机械臂的电容测量电路相连接。 有益效果:本发明中的触觉传感单元通过两片柔性极板和中两片柔性极板中的复 合介质层构成等效的平行板式电容器,在微小动态的触觉力作用下,两片柔性极板和复合 介质层被压扁,有效介电常数发生变化,通过电极引线传导至测量电路,实现机械臂的触觉 感知。本发明制备简易,易于大批量生产,在纤维缠绕用机械臂上可以实现高灵敏度的触觉 感知,有效保障纤维在缠绕中所受力的稳定,避免机械臂在缠绕纤维时使纤维发生断裂的 问题。 3 CN 111590868 A 说 明 书 2/2 页 附图说明 图1是触觉传感单元的结构示意图; 图中:1、复合介质层,2、柔性极板,3、电极引线。











