
技术摘要:
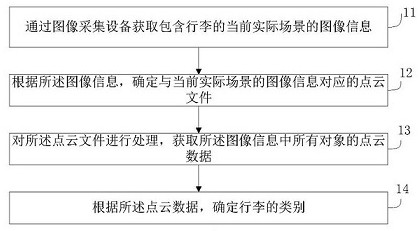
本发明的实施例提供一种行李类别的确定方法及装置,所述方法包括:通过图像采集设备获取包含行李的当前实际场景的图像信息;根据所述图像信息,确定与当前实际场景的图像信息对应的点云文件;对所述点云文件进行处理,获取所述图像信息中所有对象的点云数据;根据所述 全部
背景技术:
随着民航业的飞速发展,人们生活方式的改变,乘坐飞机出行的旅客逐年递增,而 传统的人工托运行李服务方式已经无法满足日益增长的旅客需求,而增加人工柜台需要投 入大量的人力物力,因此很多机场和航空公司逐渐加大了自助行李托运设备的投入。自助 行李托运设备占地面积小,不需要重复投入人力,旅客可以自助进行行李托运,极大的减轻 了航空公司的托运压力。 自助托运行李时,需要对行李有所区分,正常的行李箱可以直接托运,而行李箱以 外的背包、手拎包等软包需要放在托盘里才能进行托运,对于一些超大或超小的行李则需 要去超规行李托运处进行托运。所以需要自助托运设备对旅客的行李进行准确的分类。目 前已有的自助托运行李无法对行李进行准确分类,经常会出现托运不成功或者称重不准确 的问题,给托运行李带来不便。
技术实现要素:
本发明要解决的技术问题是提供一种行李类别的确定方法及装置。可实现行李的 自动分类,具有广泛的应用性。 为解决上述技术问题,本发明的技术方案如下: 一种行李类别的确定方法,所述方法包括: 通过图像采集设备获取包含行李的当前实际场景的图像信息; 根据所述图像信息,确定与当前实际场景的图像信息对应的点云文件; 对所述点云文件进行处理,获取所述图像信息中所有对象的点云数据; 根据所述点云数据,确定行李的类别。 可选的,通过图像采集设备获取包含行李的当前实际场景的图像信息,包括:通过 双目相机对包含行李的当前实际场景进行图像采集,获取第一图像以及第二图像,所述第 一图像中包括行李的特征信息;所述第二图像为包括行李空间姿态的深度图像。 可选的,根据所述图像信息,确定与当前实际场景的图像信息对应的点云文件,包 括: 获取所述深度图像的各像素点的三维坐标; 根据所述各像素点的三维坐标以及每一像素点的深度值,确定与当前实际场景的图像 信息对应的点云文件。 可选的,对所述点云文件进行处理,获取所述图像信息中所有对象的点云数据,包 括: 根据所述点云文件中,点与点之间的距离不同和/或点与点之间的连续性,将不同范围 5 CN 111598063 A 说 明 书 2/10 页 内的点分成不同的部分,对当前实际场景的所述点云文件进行分割,获取图像上所有对象 的点云数据;所述对象包括图像上出现的物体。 可选的,根据所述点云数据,确定行李的类别,包括: 根据所述图像上的对象的点云数据,确定行李的特征信息; 根据行李的特征信息,确定行李的类别。 可选的,所述行李的特征信息包括以下至少一项:行李的长;行李的宽;行李的高。 可选的,所述根据所述图像上的对象的点云数据,确定行李的长,包括: 其中, 为行李的长; 为行李的像素长; 为数据长的像素值; 为获取的深度图信息; 为相机的长视角。 可选的,所述根据所述图像上的对象的点云数据,确定行李的宽,包括: 其中, 为行李的宽; 为行李的像素宽; 为数据宽的像素 值; 为获取的深度图信息; 为相机的宽视角。 可选的,所述根据所述图像上的对象的点云数据,确定行李的高,包括: 其中, 为行李的高; 为预先构建的深度图信息; 为 获取的深度图信息; 为相机距行李所在的传送带的高度; 为传送带的倾斜 角度。 可选的,根据行李的特征信息,确定行李的类别,包括以下至少一项: 根据行李的尺寸,确定行李的类别; 根据行李的表面及边缘特征,确定行李的类别; 根据行李的表象特征,确定行李的类别。 可选的,根据行李的尺寸,确定行李的类别,包括: 行李的边缘对应的尺寸的大小为预设固定值,且行李的边缘对应的高度尺寸的大小成 递减或递增趋势,确定行李为托盘或者放置于托盘上的行李。 可选的,根据行李的表面及边缘特征,确定行李的类别包括: 根据行李表面对应的尺寸的规则度以及行李表面对应的尺寸的平整度,确定软包数据 组,其中,软包数据组的表面没有一定的规则,有明显的凹凸现象; 根据行李边缘对应的尺寸的规则度以及行李边缘对应的尺寸的规则度,确定硬包数据 组,其中,硬包数据组的边缘尺寸和高度尺寸有一定的规则,没有明显的凹凸; 根据行李边缘对应的尺寸的规则度以及行李高度对应的尺寸的规则度,确定异形行李 6 CN 111598063 A 说 明 书 3/10 页 数据组,其中,异形行李的长、宽、高有一个尺寸超过或小于限定值。 可选的,根据行李的表象特征,确定行李的类别,包括以下至少一项: 若行李具有轮子的特征,确定行李为硬箱,没有轮子特征的行李为软包行李; 若行李具有手拎带的特征,确定行李为软包行李; 若行李具有背带的特征,确定行李为软包行李。 本发明的实施例还提供一种行李类别的确定装置,包括: 获取模块,用于通过图像采集设备获取包含行李的当前实际场景的图像信息; 处理模块,用于根据所述图像信息,确定与当前实际场景的图像信息对应的点云文件; 对所述点云文件进行处理,获取所述图像信息中所有对象的点云数据;根据所述点云数据, 确定行李的类别。 本发明的上述方案至少包括以下有益效果: 本发明的上述方案,通过图像采集设备获取包含行李的当前实际场景的图像信息;根 据所述图像信息,确定与当前实际场景的图像信息对应的点云文件;对所述点云文件进行 处理,获取所述图像信息中所有对象的点云数据;根据所述点云数据,确定行李的类别。可 实现行李的自动分类,具有广泛的应用性。 附图说明 图1是本发明的行李类别的确定方法的流程示意图; 图2是本发明的行李类别的确定装置的模块示意图。











