
技术摘要:
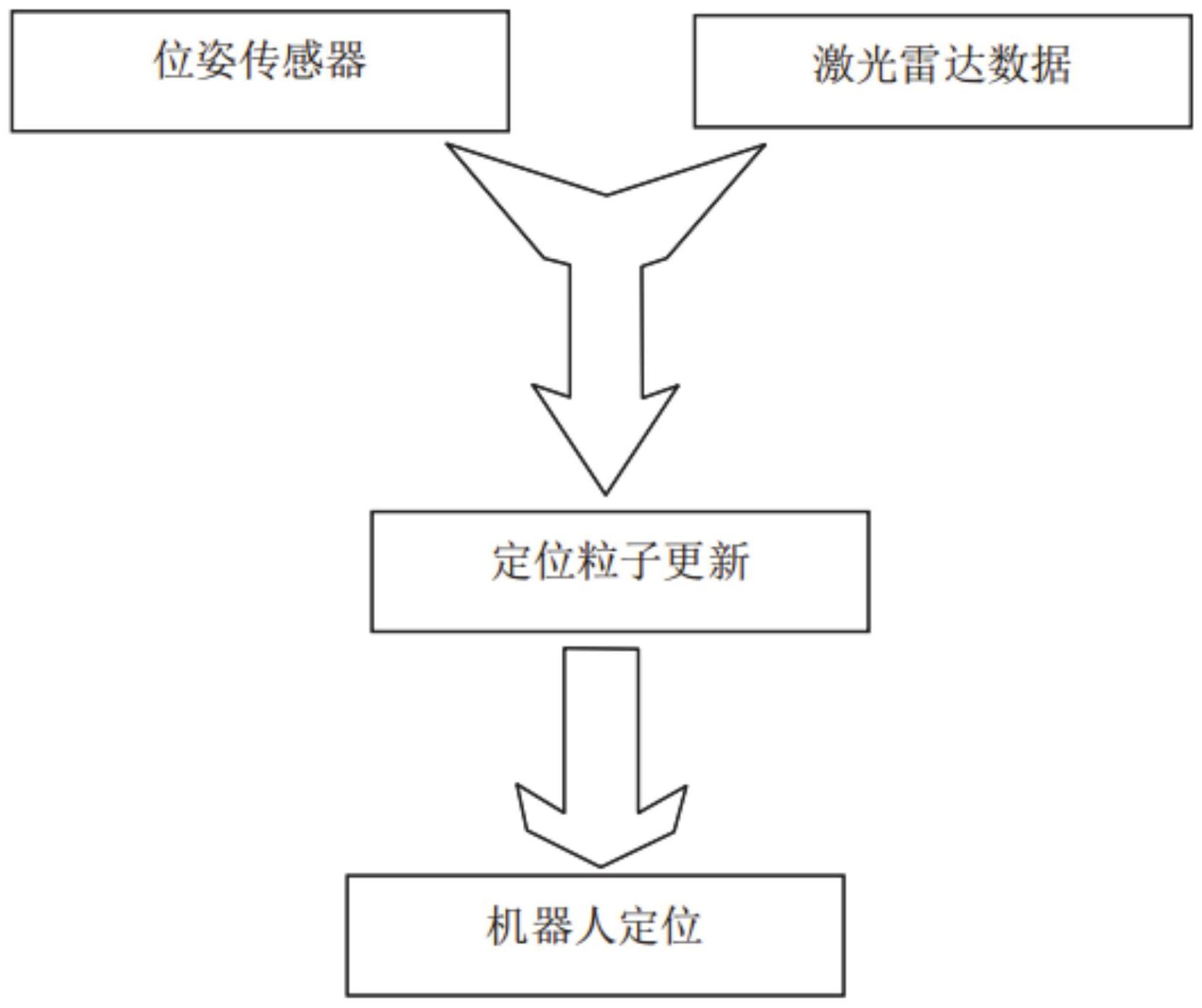
本公开提供了一种移动机器人导航实时定位方法、系统、介质及电子设备,涉及机器人技术领域,获取机器人测得的位姿数据和激光雷达数据,构建机器人所在环境的平面地图;对当前定位粒子进行旋转和平移理;以权重最大的粒子对应的位姿数据作为位姿均值,以该粒子集的方差 全部
背景技术:
本部分的陈述仅仅是提供了与本公开相关的
技术实现要素:
,并不必然构成现有技术。 定位问题是移动机器人运动过程中非常重要的一个问题,目前常用的方法有里程 计导航、惯性导航、视觉导航、卫星导航等导航方式。这些导航方式各有优缺点:单纯里程计 导航优势是简便容易实现,缺点是存在累计误差;惯性导航通常用来弥补单纯里程计的误 差;视觉导航和卫星导航定位精度高,但稳定性容易受环境干扰,从而导致定位失败。 随着人们对于机器人定位技术研究,人们逐渐倾向使用组合导航的方式。使用激 光雷达数据匹配地图来修正里程计造成累计偏差。 本公开发明人发现,目前机器人定位方法使用较多的是粒子滤波算法,常用的粒 子滤波会随着重采样多次执行,出现粒子退化的问题,退化后的粒子不能很好的适应环境 干扰、移动机器人自身元器件干扰带来的不确定性,从而导致定位鲁棒性变差。











