
技术摘要:
本发明涉及车载人脸抓拍技术领域,为车载人脸抓拍方法及系统,其方法包括步骤:S1、将人脸抓拍摄像头设于车辆内;S2、通过人脸抓拍摄像头拍摄行人人脸图像,进行人脸检测及人脸跟踪;S3、实时获取车辆位置信息和车辆状态数据,判断车辆是否停靠;S4、若判断车辆停靠, 全部
背景技术:
随着人工智能领域的兴起,近年来,机器学习和深度学习技术得到了极大的发展, 作为关键技术之一的人脸识别技术也渐趋成熟,且人脸检测、跟踪和识别也已在手机、服务 器及其它终端设备上得到广泛的应用。 现阶段出于安防需求,需要在各大客车中安装人脸抓拍摄像头,进行人脸抓拍和 数据比对,以完成安防布置。然而,现有的车载人脸抓拍方法及装置的具体技术流程仍然不 够完善,没有提出完整可用的车载人脸抓拍方法。 现有人脸跟踪方法通常有逐帧检测的人脸跟踪方法、camshift搭配卡尔曼滤波的 跟踪方法、全卷积神经网络的人脸识别跟踪方法等,这样的跟踪方法若直接应用于车载抓 拍场景是非性能最优的,或不具备条件的,原因如下:逐帧检测的人脸跟踪方法,通过对每 帧图像重复执行人脸检测的全部操作更新每帧的人脸位置,运算量较大,在多人同时出现 时消耗运算性能更大;以camshift搭配卡尔曼滤波的跟踪方法在目标移动速度较慢、尺度 变化较小的情况下,通过位置估计和质心迭代,能够有较快的收敛速度,但当抓拍装置朝向 车前时,人脸目标的移动速度较快,且由于抓拍机的帧数一般不会太高,两帧间的目标偏差 较大,导致了该算法迭代次数的增加,在行人较多时无疑大大提高了嵌入式系统的负荷和 降低了实时性;而全卷积神经网络的人脸识别跟踪方法虽在众多的场景中都得到了很好的 应用,但为了能使其运算于arm平台上,需要缩减其网络模型,降低其复杂度,意味着需要更 多的车载场景人脸样本以提高其精确度,即需获取更大量的、经过预先尺度归一化和标记 的训练样本,而基于当前的应用环境下,这些样本是现有人脸抓拍技术所不易获得的。 也就是说,现有人脸抓拍及人脸跟踪技术,不能完全契合于车载应用场景,通常需 要更高性能的硬件运行,导致了装置的成本较高,或需要现阶段所不具备的条件去开发;且 只考虑到摄像头的单独运作,而没有与车辆配合应用,导致了抓拍装置资源的浪费;也没有 考虑到车上设备的成本控制问题,以及设备与车辆联动以实现配合应用的方向问题。
技术实现要素:
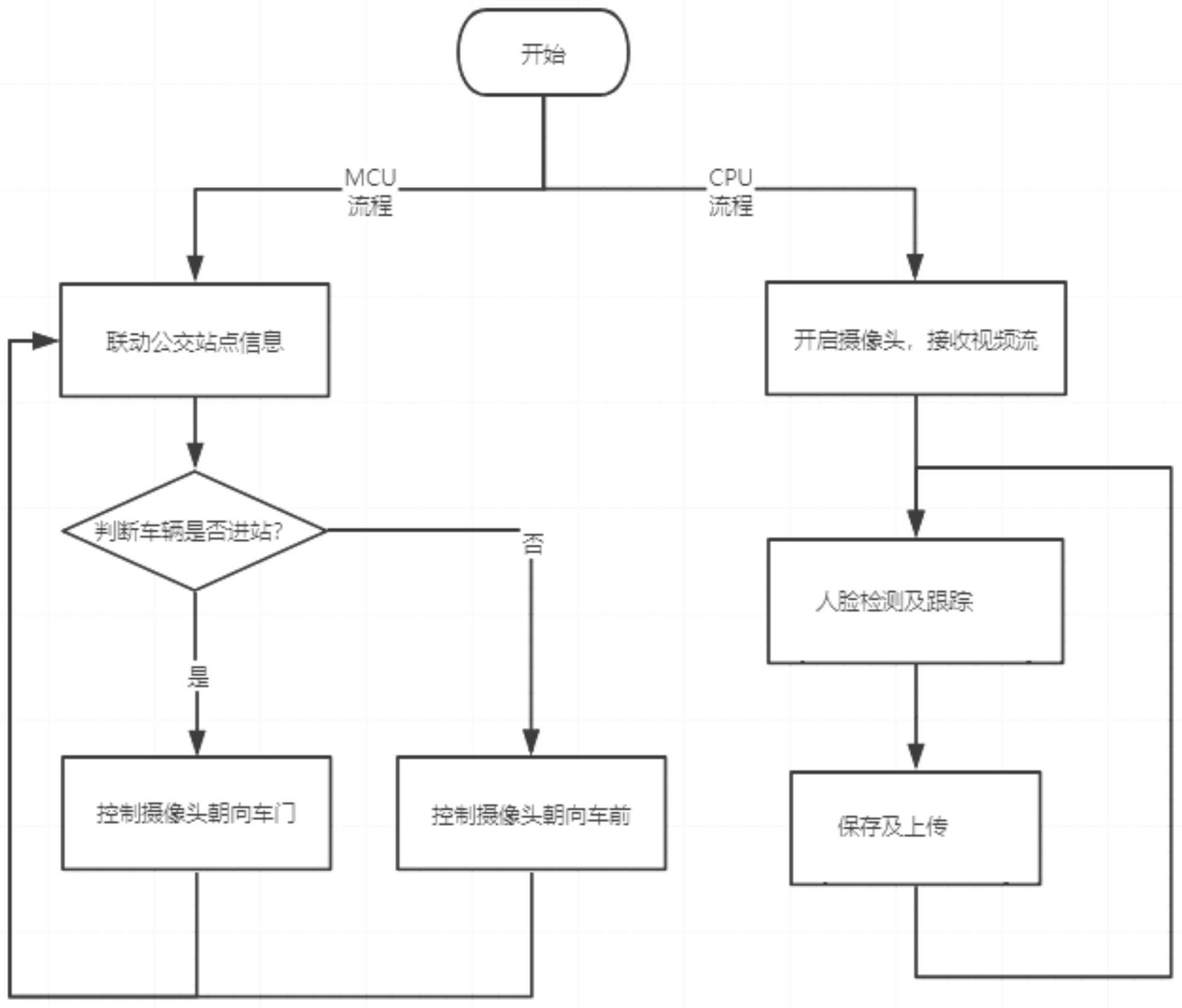
为解决现有技术所存在的技术问题,本发明提供车载人脸抓拍方法及系统,以人 脸中心点跟踪取代人脸区块像素集跟踪,根据车载抓拍的具体场景简化跟踪算法,有效减 少内存和运算性能消耗,且其流程方法实现简单,所需运算力较少,能以较低成本的嵌入式 芯片来实现。 本发明方法采用以下技术方案来实现:车载人脸抓拍方法,包括以下步骤: S1、将人脸抓拍摄像头设于车辆内; S2、通过人脸抓拍摄像头拍摄行人人脸图像,进行人脸检测及人脸跟踪; S3、实时获取车辆位置信息和车辆状态数据,判断车辆是否停靠; 5 CN 111611974 A 说 明 书 2/6 页 S4、若判断车辆停靠,则进一步判断出车辆停靠前的最后一次减速,并在该最后一 次减速开始到车辆前门打开的时间段内,控制人脸抓拍摄像头朝向车门拍摄,转入步骤S2; 否则,控制人脸抓拍摄像头朝向车前拍摄,转入步骤S2。 在优选的实施例中,步骤S2中人脸检测及人脸跟踪的过程为: S21、通过人脸抓拍摄像头获取视频帧,对人脸图像进行预处理,当检测到人脸时, 转入步骤S22; S22、以人脸检测方法获取视频帧中第一帧图像的人脸中心点集合;并通过人脸跟 踪算法进行人脸特征质心迭代至结果收敛,实现视频帧中第一帧图像的人脸跟踪,获取视 频帧中第二帧图像的人脸中心点集合; S23、求取相邻两帧图像的人脸中心点差值,作为帧间人脸中心点偏差量输入到 PID运算跟踪算法,预测下一帧图像的人脸中心点位置;以PID运算跟踪算法预测的结果作 为人脸跟踪算法下一次迭代起点,进行人脸特征质心迭代至结果收敛,最终获取下一帧图 像的人脸中心点集合; S24、将前后视频帧的人脸中心点集进行对比,针对前一帧图像中的每个人脸,在 后一帧图像中检索是否存在该人脸新的中心点位置,将后一帧图像中的人脸对象与前一帧 图像中的人脸对象进行匹配,实现前一帧图像中人脸对象的跟踪,并将后一帧图像中未在 前一帧图像出现的人脸对象判断为新的人脸对象。 在优选的实施例中,步骤S24包括: S241、将前一帧图像中的每一个人脸中心点位置设为圆心,在预设距离阈值范围 内检索后一帧图像中该人脸新的中心点位置; S242、判断在预设距离阈值范围内后一帧图像中是否包含了该人脸新的中心点位 置,若不包含则记录消失帧的数量,当消失帧的数量超过限定值时,确认跟踪对象消失,停 止跟踪并清除该跟踪对象数据;若包含则进一步判断新的中心点位置有一个还是多个,转 入步骤S243; S243、若有一个新的中心点位置,则将后一帧图像中该新的中心点位置所对应的 人脸图像匹配为前一帧图像中的同一人脸对象;若有多个新的中心点位置,则将与所述圆 心距离最近的新的中心点位置所对应的人脸图像匹配为前一帧图像中的同一人脸对象; S244、完成每个人脸在后一帧图像中所有新的中心点位置检索后,后一帧图像中 没有被匹配的人脸中心点位置,将判断为新的人脸对象。 本发明系统采用以下技术方案来实现:车载人脸抓拍系统,包括人脸抓拍摄像头、 处理器MCU、ARM芯片、旋转底座及舵机;处理器MCU通过舵机与旋转底座连接,人脸抓拍摄像 头安装在旋转底座上;处理器MCU获取车辆位置信息及车辆数据,并依据所获取的车辆位置 信息及车辆数据计算车辆到站时间和离站时间,判断车辆是否进站停靠,若判断车辆进站 停靠,则进一步判断出车辆进站停靠前的最后一次减速,并在该最后一次减速开始到车辆 前门打开的时间段内,控制舵机驱动旋转底座带动人脸抓拍摄像头转动,使人脸抓拍摄像 头朝向车门拍摄;相应地,处理器MCU在车辆前门关闭后,控制舵机驱动旋转底座带动人脸 抓拍摄像头朝向车前拍摄;ARM芯片接收人脸抓拍摄像头所拍摄的人脸图像,进行人脸检测 及人脸跟踪。 本发明与现有技术相比,具有如下优点和有益效果: 6 CN 111611974 A 说 明 书 3/6 页 1、本发明在车前抓拍过程中,针对人行道上的行人,通过速度计算和前后帧人脸 中心位置对比,以PID算法计算下一帧人脸目标出现在画面上的大致位置;根据PID算法的 计算结果,可缩小Camshift的检测范围,避免了大范围的像素块迭代运算,能有效减小迭代 次数,提高实时性。 2、本发明针对车内人脸抓拍,由于是正脸抓拍目标行人,而行人由车前门转向车 厢时,通常不会再有正脸抓拍的机会,由此简化算法,当计算得出阈值较低且行人位置靠近 车厢时,行人将超出了人脸抓拍摄像头拍摄范围,放弃对该目标行人的跟踪,从而减少人脸 跟踪数量,减小系统运算力消耗。 3、本发明优化了抓拍系统在车载场景应用时的性能,降低设备性能成本,或者预 留运算性能以完成更多的业务功能。 4、本发明实现了抓拍系统与公交联动,通过公交的移动,大大提高了安防布置的 覆盖率。 附图说明 图1是本发明车载人脸抓拍方法整体流程图; 图2是人脸检测及跟踪的实施流程图; 图3是保存及上传图片的流程图; 图4是本发明车载人脸抓拍系统设置在车上的位置示意图; 图5是人脸抓拍摄像头的结构框图。











