
技术摘要:
本申请公开了一种车辆检测方法、装置、计算机设备及存储介质,涉及车辆检测技术领域。该车辆检测方法可以通过获取图像序列,根据超越条件从非特种车辆中筛选出符合超越条件的目标车辆,然后根据目标车辆的行驶轨迹和特种车辆的行驶轨迹确定目标车辆是否超越特种车辆。 全部
背景技术:
特种车辆一般包括警车、消防车、救护车以及工程抢险车等执行特种任务的车辆。 一般而言,执行特种任务的特种车辆需要优先通行。然而,在实际生活中,往往会出现一些 车辆在遇到特种车辆时不进行避让,甚至超越特种车辆的情况。其中,超越特种车辆是指从 特种车辆所在车道的相邻车道驶入特种车辆所在车道并抢先占据特种车辆行驶方向的前 方位置。因此,需要对该些超越特种车辆的车辆进行检测。 现有技术中,对超越特种车辆的车辆进行检测过程一般是:获取交通视频,由人工 对交通视频中的特种车辆周围的车辆的行驶过程进行识别,以判断特种车辆周围的车辆是 否存在超越特种车辆的违章行为。 然而,通过人工检测海量的视频数据比较耗费人力,并且人工审核的效率较低。
技术实现要素:
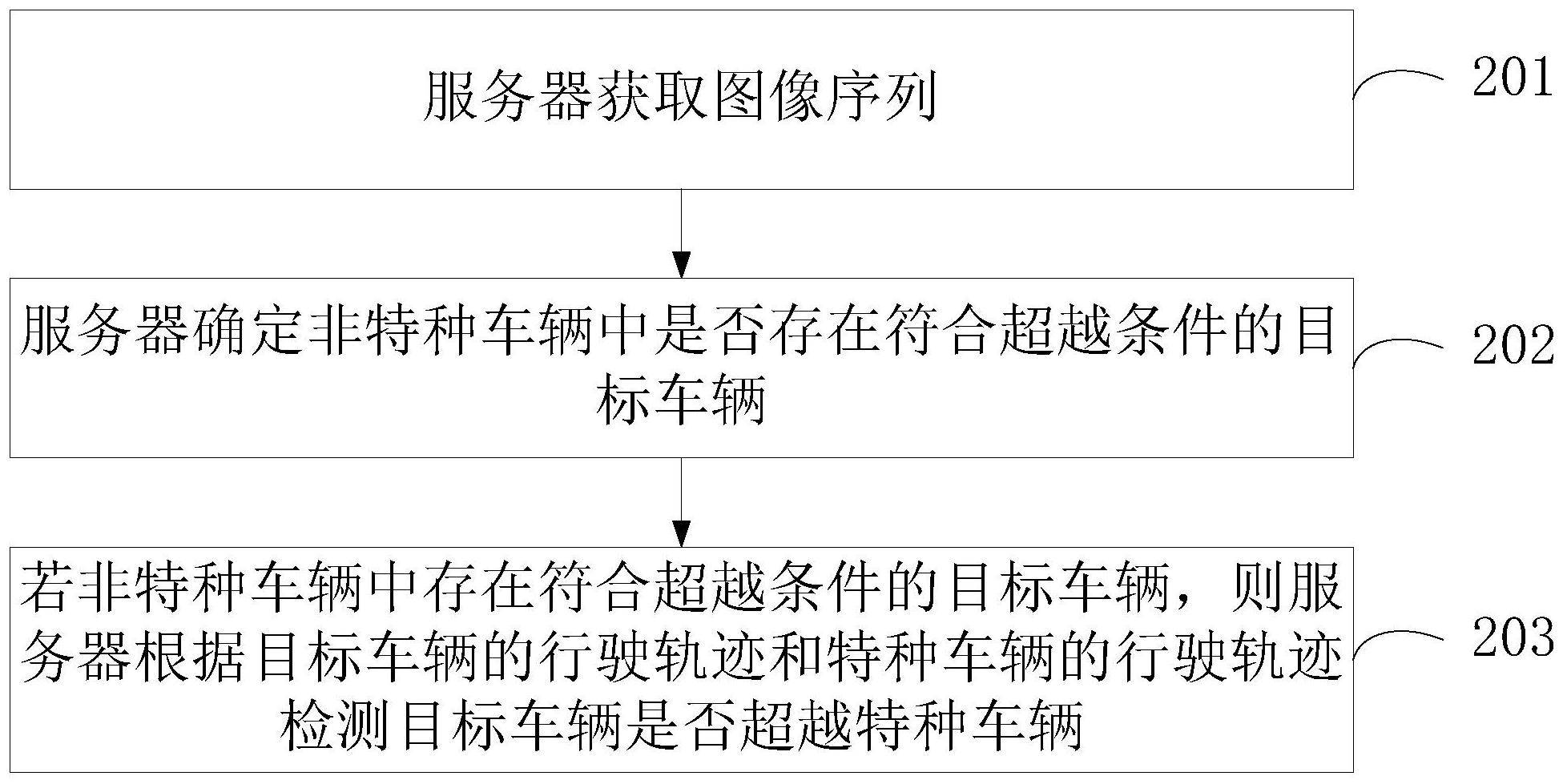
基于此,有必要针对上述人工检测存在的耗费人力,且效率较低的问题,提供一种 车辆检测方法、装置、计算机设备及存储介质。 一种车辆检测方法,该方法包括: 获取图像序列,图像序列包括多个图像帧,各图像帧中包括特种车辆和非特种车 辆; 确定非特种车辆中是否存在符合超越条件的目标车辆,超越条件为车辆有可能超 越特种车辆的条件; 若非特种车辆中存在符合超越条件的目标车辆,则根据目标车辆的行驶轨迹和特 种车辆的行驶轨迹检测目标车辆是否超越特种车辆。 在本申请一个实施例中,确定非特种车辆中是否存在符合超越条件的目标车辆之 前,该方法还包括: 检测特种车辆是否处于执行紧急任务状态; 相应的,确定非特种车辆中是否存在符合超越条件的目标车辆,包括: 若特种车辆处于执行紧急任务状态,则确定非特种车辆中是否存在符合超越条件 的目标车辆。 在本申请一个实施例中,确定非特种车辆中是否存在符合超越条件的目标车辆, 包括: 从非特种车辆中确定出第一车辆,第一车辆的行驶方向与特种车辆的行驶方向相 同; 从第一车辆中确定出第二车辆,第二车辆所在车道与特种车辆所在车道相同或者 4 CN 111598054 A 说 明 书 2/15 页 相邻; 将第二车辆确定为符合超越条件的目标车辆。 在本申请一个实施例中,根据目标车辆的行驶轨迹和特种车辆的行驶轨迹检测目 标车辆是否超越特种车辆之前,该方法包括: 分别获取目标车辆的第一特征和特种车辆的第二特征; 分别根据第一特征和第二特征获取目标车辆在各图像帧中的第一位置以及特种 车辆在各图像帧中的第二位置; 分别根据第一位置和第二位置拟合出目标车辆的行驶轨迹和特种车辆的行驶轨 迹。 在本申请一个实施例中,分别根据第一特征和第二特征获取目标车辆在各图像帧 中的第一位置以及特种车辆在各图像帧中的第二位置,包括: 对于第i个图像帧,分别根据目标车辆在第i-1个图像帧中的第一位置确定目标车 辆对应的第一边界框和根据特种车辆在第i-1个图像帧中的第二位置确定特种车辆对应的 第二边界框; 分别根据第一边界框和第二边界框确定第i个图像帧中的第一车辆识别范围和第 二车辆识别范围; 根据第一特征从第一车辆识别范围内识别目标车辆,根据第二特征从第二车辆识 别范围内识别特种车辆,并确定目标车辆在第i个图像帧中的第一位置和特种车辆在第i个 图像帧中的第二位置。 在本申请一个实施例中,根据目标车辆的行驶轨迹和特种车辆的行驶轨迹检测目 标车辆是否超越特种车辆,包括: 根据特种车辆的行驶轨迹确定特种车辆延特种车辆的行驶方向的延伸线; 检测目标车辆的行驶轨迹与延伸线是否相交; 若目标车辆的行驶轨迹与延伸线相交,则检测目标车辆的行驶轨迹与延伸线的交 点位置到特种车辆的距离是否小于距离阈值; 若小于距离阈值,则确定目标车辆超越特种车辆。 在本申请一个实施例中,获取图像序列,包括: 获取道路抓拍视频; 从道路抓拍视频中获取目标图像帧,目标图像帧中包括特种车辆; 将目标图像帧以及道路抓拍视频中目标图像帧之后的多个连续图像帧作为图像 序列。 在本申请一个实施例中,从道路抓拍视频中获取目标图像帧,包括: 周期性地从道路抓拍视频中提取候选图像帧; 通过目标检测算法检测候选图像帧中是否存在特种车辆; 若某候选图像帧中存在特种车辆,则将某候选图像帧确定为目标图像帧。 一种车辆检测装置,该装置包括: 获取模块,用于获取图像序列,图像序列包括多个图像帧,各图像帧中包括特种车 辆和非特种车辆; 确定模块,用于确定非特种车辆中是否存在符合超越条件的目标车辆,超越条件 5 CN 111598054 A 说 明 书 3/15 页 为车辆有可能超越特种车辆的条件; 检测模块,用于若非特种车辆中存在符合超越条件的目标车辆,则根据目标车辆 的行驶轨迹和特种车辆的行驶轨迹检测目标车辆是否超越特种车辆。 一种计算机设备,包括存储器和处理器,该存储器存储有计算机程序,该计算机程 序被该处理器执行时实现以下步骤: 获取图像序列,图像序列包括多个图像帧,各图像帧中包括特种车辆和非特种车 辆; 确定非特种车辆中是否存在符合超越条件的目标车辆,超越条件为车辆有可能超 越特种车辆的条件; 若非特种车辆中存在符合超越条件的目标车辆,则根据目标车辆的行驶轨迹和特 种车辆的行驶轨迹检测目标车辆是否超越特种车辆。 一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现 以下步骤: 获取图像序列,图像序列包括多个图像帧,各图像帧中包括特种车辆和非特种车 辆; 确定非特种车辆中是否存在符合超越条件的目标车辆,超越条件为车辆有可能超 越特种车辆的条件; 若非特种车辆中存在符合超越条件的目标车辆,则根据目标车辆的行驶轨迹和特 种车辆的行驶轨迹检测目标车辆是否超越特种车辆。 本申请实施例提供的技术方案带来的有益效果至少包括: 上述车辆检测方法、装置、计算机设备及存储介质,可以提高对车辆的检测效率。 该车辆检测方法中,服务器可以获取图像序列,图像序列包括多个图像帧,每个图像帧中包 括特种车辆和非特种车辆。服务器可以根据超越条件从非特种车辆中筛选出符合超越条件 的目标车辆,然后根据目标车辆的行驶轨迹和特种车辆的行驶轨迹确定目标车辆是否超越 特种车辆。当目标车辆超越特种车辆时,说明目标车辆违章,目标车辆没有超越特种车辆 时,目标车辆没有违章。本申请实施例中,通过服务器判断图像序列中的目标车辆是否超越 特种车辆,提高了对目标车辆的检测效率,降低了人工审核的人力成本。 附图说明 图1为本申请实施例提供的车辆检测方法的实施环境的示意图; 图2为本申请实施例提供的一种车辆检测方法的流程图; 图3为本申请实施例提供的另一种拟合目标车辆和特种车辆的行驶路径的方法的 流程图; 图4为本申请实施例提供的另一种车辆检测方法的流程图; 图5为本申请实施例提供的确定图像序列的方法的流程图; 图6为本申请实施例提供的确定目标车辆的方法的流程图; 图7为本申请实施例提供的检测目标车辆是否超越特种车辆的方法的流程图; 图8为本申请实施例提供的一种车辆检测装置的模块图; 图9为本申请实施例提供的一种计算机设备的模块图。 6 CN 111598054 A 说 明 书 4/15 页











