
技术摘要:
本发明公开了一种夹具可更换的工业机器人,包括机器人、绕机床加工中心设置的底座、设于底座上用于放置机器人并促使机器人沿机床加工中心的周边运动的导轨、以及设于底座一侧的工件存放台和夹具体存放台,夹具体上设有凸起卡扣;机器人上设有与凸起卡扣相配合的夹具体 全部
背景技术:
机床加工中心是由机械设备与数控系统组成的适用于加工复杂零件的高效率自 动化机床。以往的机床加工中心上下料都是由人工操作完成,现在逐渐推行由机器人代替 人工实施上下料操作,但是单个机器人无法适应混料生产,另外,有时同一件工件也需要在 机床加工中心的不同机床(例如车床、铣床、钻床、铰床、镗床等)中进行加工,换型换线换机 时依然需要人工去更换机床加工中心中不同机床的机床卡盘和机器人夹具,这样的生产设 备自动化程度不理想,浪费生产工时,同时人工操作时存在潜在安全风险。所以,需要对现 有机器人进行改进优化,以满足现代化生产需求。 因此,现有机器人换型换线换机时依然需要人工去更换机床卡盘和机器人夹具, 是一件亟待解决的技术问题。
技术实现要素:
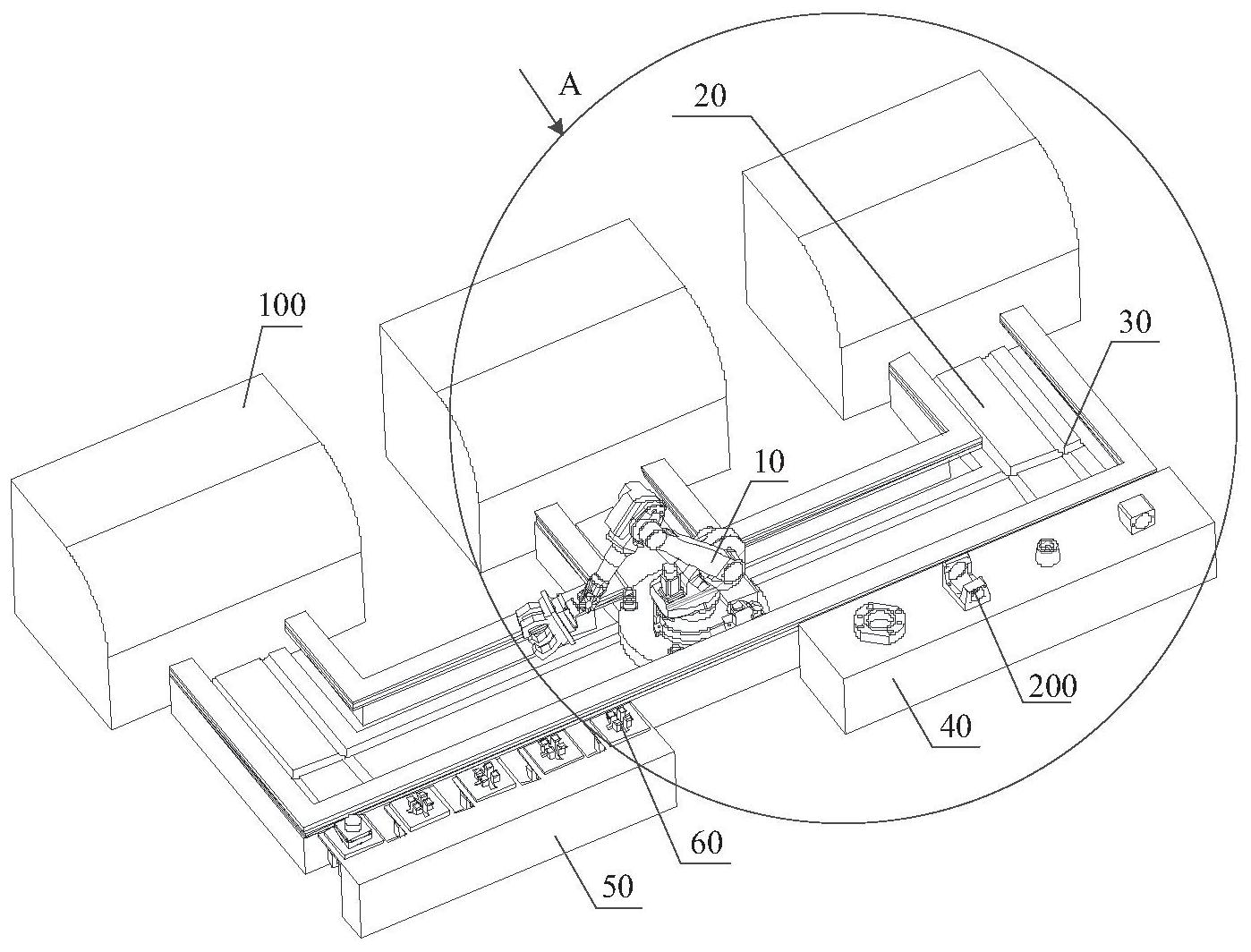
本发明提供了一种夹具可更换的工业机器人,旨在解决现有机器人换型换线换机 时依然需要人工去更换机床卡盘和机器人夹具的技术问题。 本发明提供一种夹具可更换的工业机器人,包括机器人、绕机床加工中心设置的 底座、设于底座上用于放置机器人并促使机器人沿机床加工中心的周边运动的导轨、以及 设于底座的一侧用于存放工件的工件存放台和用于存放不同夹具体的夹具体存放台,夹具 体上设有凸起卡扣;机器人上设有与凸起卡扣相配合的夹具体连接装置,夹具体连接装置 包括卡口、设于卡口处的锁紧卡扣、与锁紧卡扣相连的齿轮、以及与齿轮相连的驱动电机, 凸起卡扣穿过卡口并伸入至锁紧卡扣内,在驱动电机的驱动下,锁紧卡扣通过夹紧或松开 凸起卡扣来更换夹具体。 进一步地,驱动电机设于夹具体连接装置的中心处,驱动电机的主轴套设于齿轮 内,多个锁紧卡扣以齿轮为中心、绕驱动电机的外周均匀布置。 进一步地,锁紧卡扣包括卡套及与卡套相配合用于套设卡套的卡环,卡套包括用 于扣合凸起卡扣的卡圈及分别沿卡圈的两端延伸的第一扣杆和第二扣杆,第一扣杆靠近齿 轮设置且与齿轮啮合连接,第一扣杆上对应设有与齿轮相啮合的轮齿;卡环包括第一卡环 和第二卡环,第一扣杆对应套设于第一卡环内,第二扣杆对应套设于第二卡环内。 进一步地,导轨上设有导向凹槽,导向凹槽包括纵横交错设置的纵向导轨凹槽和 横向导轨凹槽,机器人还包括行走机构,行走机构包括设于底部的万向球、与万向球相连用 于控制机器人直线行走的直线行走控制机构、以及与万向球相连用于控制机器人转弯行走 的转弯行走控制机构。 进一步地,直线行走控制机构包括设于底板上用于支撑万向球的万向球支撑辊、 并排设于机器人的底部两侧且位于万向球的顶端用于驱动万向球转动的万向球驱动带、以 4 CN 111571288 A 说 明 书 2/5 页 及与万向球驱动带相连接的第一驱动装置;在第一驱动装置的驱动下,万向球驱动带带动 机器人沿直线方向行走。 进一步地,转弯行走控制机构包括设于机器人的底部中央的座体、与万向球驱动 带相连的旋转驱动齿圈、以及与旋转驱动齿圈啮合连接的蜗杆、以及与蜗杆相连接的第二 驱动装置;在第二驱动装置的驱动下,座体相对旋转驱动齿圈转动,万向球驱动带带动机器 人转弯。 进一步地,导轨上还设有挡边及设于挡边内侧的导电滑触线,机器人上对应设有 与导电滑触线配合使用的导电滑触头,导电滑触头延伸至机器人内用于为机器人供电。 进一步地,导电滑触线上设有导电滑触线火线和导电滑触线零线,导电滑触头对 应设有与导电滑触线火线相对接的导电滑触头火线、以及与导电滑触线零线相对接的导电 滑触头零线。 进一步地,导电滑触头的数量为多个,多个导电滑触头分别设于机器人底盘上方 的边角处。 进一步地,工件存放台和夹具体存放台均设于底座远离机床加工中心的一侧。 本发明所取得的有益效果为: 本发明提供的夹具可更换的工业机器人,采用机器人、底座、导轨、工件存放台、夹 具体和夹具体存放台,机器人上设有与夹具体相配合的夹具体连接装置,夹具体上设有凸 起卡扣,夹具体连接装置包括卡口、锁紧卡扣、齿轮和驱动电机,需更换夹具体时,将夹具体 连接装置放置于夹具体的上面,凸起卡扣会插入到夹具体连接装置的锁紧卡扣内,机器人 通过驱动电机及齿轮拉动,锁紧卡扣向电机中心移动,移动时将夹具体上的凸起卡扣锁紧, 使机器人稳固取走夹具体。本发明提供的夹具可更换的工业机器人,自动化程度高、更换速 度快;占用空间少、运输效率高;制造成本低、安全性能好。 附图说明 图1为本发明提供的夹具可更换的工业机器人一实施例的立体结构示意图; 图2为本发明提供的夹具可更换的工业机器人夹具体更换时一实施例的立体结构 示意图; 图3为图1中机器人一实施例中第一视角的立体结构示意图; 图4为图1中机器人一实施例中第二视角的立体结构示意图; 图5为图1中机器人一实施例中第三视角的立体结构示意图; 图6为图1中A部分的局部放大示意图。 附图标号说明: 10、机器人;20、底座;30、导轨;40、工件存放台;50、夹具体存放台;60、夹具体;61、 凸起卡扣;11、夹具体连接装置;111、卡口;112、锁紧卡扣;113、齿轮;114、驱动电机;1121、 卡套;1122、卡环;11211、卡圈;11212、第一扣杆;11213、第二扣杆;11221、第一卡环;11222、 第二卡环;31、纵向导轨凹槽;32、横向导轨凹槽;121、万向球;122、直线行走控制机构;123、 转弯行走控制机构;1221、万向球支撑辊;1222、万向球驱动带;1223、第一驱动装置;1231、 座体;1232、驱动齿圈;1233、蜗杆;1234、第二驱动装置;33、挡边;34、导电滑触线;13、导电 滑触头;341、导电滑触线火线;342、导电滑触线零线;131、导电滑触头火线;132、导电滑触 5 CN 111571288 A 说 明 书 3/5 页 头零线;124、底板;125、底盘;100、机床加工中心;200、工件。











