
技术摘要:
本申请涉及一种抗电离层闪烁的自适应无迹卡尔曼滤波载波跟踪环路及方法。所述方法包括:接收电离层闪烁条件下的接收信号,生成两路正交本地载波信号以及本地伪码信号,根据接收信号、同相信号、正交信号以及本地伪码信号,分别生成第一乘积信号和第二乘积信号,分别在 全部
背景技术:
空间电离层不均匀性会造成卫星导航信号的绕射和散射,形成电离层闪烁,造成 卫星导航信号幅度和相位的快速波动,引起载波跟踪环路相关值幅、相的快速随机波动,使 载波频率、相位等参数估计的观测模型呈现强非线性。另外,电离层闪烁还会引入非高斯噪 声,使载波参数估计呈现非平稳、非高斯特性,显著影响传统高斯白噪声假设条件下的载波 跟踪性能。 目前针对电离层闪烁条件下,提高卫星导航信号载波跟踪稳健性的主要策略有两 种,一是调整传统相位锁定环路(Conventional Phase Lock Loop,CPLL)的环路参数,以提 高其跟踪稳健性,但这必然会降低跟踪精度,且稳健性的提升非常有限;另一种是基于卡尔 曼滤波的载波跟踪策略,其中常扩展卡尔曼滤波(Extended Kalman Filter,EKF)载波跟踪 方法采用Taylor级数展开实现观测模型线性化,其线性化误差会随着系统非线性的增强而 增大,故在强闪烁下,EKF-PLL载波跟踪会产生很大的误差,导致滤波性能急剧下降;无迹卡 尔曼滤波(Unscented Kalman Filter,UKF)通过采样策略逼近非线性变换,能够有效减小 非线性系统的近似误差,尽管其应用于高动态环境可有效提高载波跟踪性能,但电离层闪 烁引入的非高斯噪声的统计特性难以确定,会严重影响UKF-PLL跟踪算法的性能,甚至引起 滤波发散。
技术实现要素:
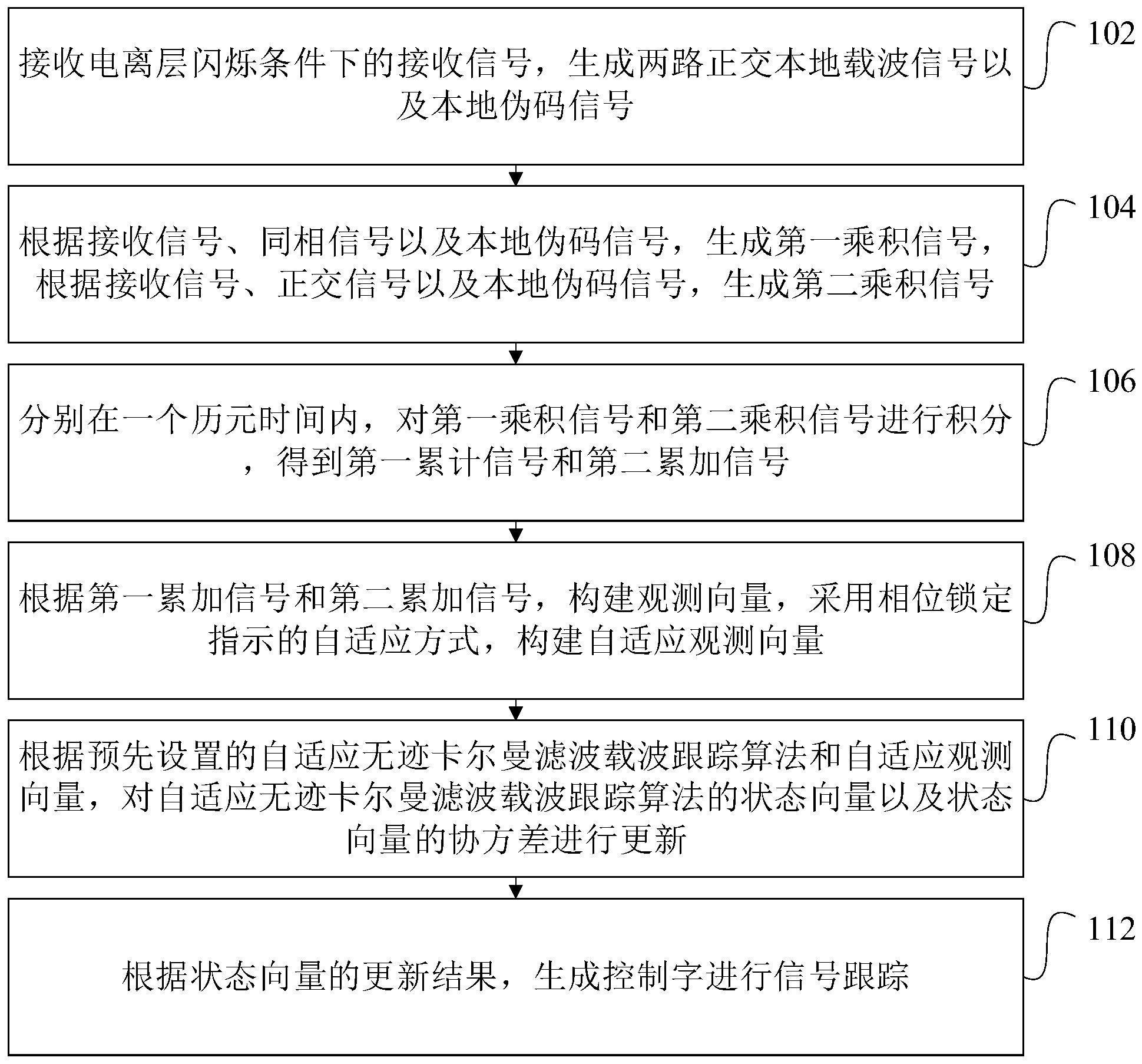
基于此,有必要针对上述技术问题,提供一种能够解决非高斯噪声对载波跟踪存 在影响问题的一种抗电离层闪烁的自适应无迹卡尔曼滤波载波跟踪环路及方法。 一种抗电离层闪烁的自适应无迹卡尔曼滤波载波跟踪环路及方法,所述方法包 括: 接收电离层闪烁条件下的接收信号,生成两路正交本地载波信号以及本地伪码信 号;所述正交本地载波信号包括:同相信号和正交信号; 根据所述接收信号、所述同相信号以及所述本地伪码信号,生成第一乘积信号,根 据所述接收信号、所述正交信号以及所述本地伪码信号,生成第二乘积信号; 分别在一个历元时间内,对所述第一乘积信号和所述第二乘积信号进行积分,得 到第一累计信号和第二累加信号;所述第一累加信号和第二累加信号均包含:闪烁引入的 误差、高斯白噪声以及闪烁引入的加性非高斯噪声; 根据所述第一累加信号和第二累加信号,构建观测向量,采用相位锁定指示的自 适应方式,构建自适应观测向量; 5 CN 111610540 A 说 明 书 2/14 页 根据预先设置的自适应无迹卡尔曼滤波载波跟踪算法和所述自适应观测向量,对 所述自适应无迹卡尔曼滤波载波跟踪算法的状态向量以及所述状态向量的协方差进行更 新; 根据所述状态向量的更新结果,生成控制字进行信号跟踪。 在其中一个实施例中,还包括:接收电离层闪烁条件下的接收信号为: r(t)=A0δAC(t-τ)D(t-τ)cos(ωIFt φ0 δφ) n(t)。 其中,A0、ωIF以及φ0分别表示信号幅度、载波频率和初相,C(t)表示伪码,D(t)表 示电文,n(t)表示高斯白噪声,δA和δφ分别表示电离层闪烁引入的信号幅度和相位波动; 生成两路正交本地载波信号分别为: sI(t)=cos(ωNCO·t) sQ(t)=-sin(ωNCO·t) 其中,sI(t)表示同相信号,sQ(t)表示正交信号,ωNCO表示载波跟踪环路本地数控 振荡器NCO产生的频率; 生成本地伪码信号记作c(t)。 在其中一个实施例中,还包括:将所述接收信号、所述同相信号以及所述本地伪码 信号相乘,生成第一乘积信号;将所述接收信号、所述正交信号以及所述本地伪码信号相 乘,生成第二乘积信号。 在其中一个实施例中,还包括:分别在一个历元时间内,对所述第一乘积信号和所 述第二乘积信号进行积分,得到第一累计信号和第二累加信号为: sI(t)·c(t)·r(t)表示第一乘积信号,sQ(t)·c(t)·r(t)表示第二乘积信号, IPk表示第一累计信号,QPk表示第二累计信号, 表示闪烁影响下的积分包络, 表示信号真实相位误差,n I ,k、n Q ,k分别表示同相信号、相交信号的高斯白噪声, 和 分别表示闪烁引入的加性非高斯噪声,Tc表示一个 历元时间。 在其中一个实施例中,还包括:根据所述第一累加信号和第二累加信号,构建观测 向量为: 其中,xk表示观测向量,nT,k表示电离层闪烁条件下观测噪声项; 采用相位锁定指示的自适应方式,构建自适应观测向量为: 其中,PLIk表示相位锁定指示项,用于反映电离层闪烁的强度,zk表示观测向量调 整项, 表示自适应观测向量; 其中, 表示观测向量变化量的预测值。 在其中一个实施例中,还包括:获取自适应无迹卡尔曼滤波载波跟踪算法的状态 6 CN 111610540 A 说 明 书 3/14 页 向量为: 其中,ωi,k表示 的i 1阶导数,i=0,1,2; 将所述状态向量进行泰勒级数展开式以矩阵形式表达式,得到自适应无迹卡尔曼 滤波载波跟踪算法的状态方程为: sk 1=Φ·sk ζk 其中,Φ表示状态转移矩阵,ζk表示状态噪声;; 确定自适应无迹卡尔曼滤波载波跟踪算法的新息为: 确定所述新息的协方差为: 根据所述新息的协方差确定观测向量预测的协方差为: 根据所述观测向量预测的协方差,确定自适应观测向量的观测噪声协方差为: 其中, 表示观测采样点,为状态向量预测值 通过载波跟 踪非线性观测方程h(·)后的变换结果,{χ(i)},i=0,1,...,2n为Sigma点集。 在其中一个实施例中,还包括:根据自适应无迹卡尔曼滤波载波跟踪算法的Sigma 点集 所述观测向量预测的协方差以及自适应观测向量的观测噪声协方差, 得到自适应状态下状态向量的预测值以及预测值误差对应的协方差;根据所述自适应无迹 卡尔曼滤波载波跟踪算法的增益,对状态向量以及所述状态向量的协方差进行更新。 一种抗电离层闪烁的自适应无迹卡尔曼滤波载波跟踪环路及装置,所述装置包 括: 信号生成模块,用于接收电离层闪烁条件下的接收信号,生成两路正交本地载波 信号以及本地伪码信号;所述正交本地载波信号包括:同相信号和正交信号;根据所述接收 信号、所述同相信号以及所述本地伪码信号,生成第一乘积信号,根据所述接收信号、所述 正交信号以及所述本地伪码信号,生成第二乘积信号; 观测向量构建模块,用于分别在一个历元时间内,对所述第一乘积信号和所述第 二乘积信号进行积分,得到第一累计信号和第二累加信号;所述第一累加信号和第二累加 信号均包含:闪烁引入的误差、高斯白噪声以及闪烁引入的加性非高斯噪声;根据所述第一 累加信号和第二累加信号,构建观测向量,采用相位锁定指示的自适应方式,构建自适应观 7 CN 111610540 A 说 明 书 4/14 页 测向量; 信号跟踪模块,用于根据预先设置的自适应无迹卡尔曼滤波载波跟踪算法和所述 自适应观测向量,对所述自适应无迹卡尔曼滤波载波跟踪算法的状态向量以及所述状态向 量的协方差进行更新;根据所述状态向量的更新结果,生成控制字进行信号跟踪。 一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理 器执行所述计算机程序时实现以下步骤: 接收电离层闪烁条件下的接收信号,生成两路正交本地载波信号以及本地伪码信 号;所述正交本地载波信号包括:同相信号和正交信号; 根据所述接收信号、所述同相信号以及所述本地伪码信号,生成第一乘积信号,根 据所述接收信号、所述正交信号以及所述本地伪码信号,生成第二乘积信号; 分别在一个历元时间内,对所述第一乘积信号和所述第二乘积信号进行积分,得 到第一累计信号和第二累加信号;所述第一累加信号和第二累加信号均包含:闪烁引入的 误差、高斯白噪声以及闪烁引入的加性非高斯噪声; 根据所述第一累加信号和第二累加信号,构建观测向量,采用相位锁定指示的自 适应方式,构建自适应观测向量; 根据预先设置的自适应无迹卡尔曼滤波载波跟踪算法和所述自适应观测向量,对 所述自适应无迹卡尔曼滤波载波跟踪算法的状态向量以及所述状态向量的协方差进行更 新; 根据所述状态向量的更新结果,生成控制字进行信号跟踪。 一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执 行时实现以下步骤: 接收电离层闪烁条件下的接收信号,生成两路正交本地载波信号以及本地伪码信 号;所述正交本地载波信号包括:同相信号和正交信号; 根据所述接收信号、所述同相信号以及所述本地伪码信号,生成第一乘积信号,根 据所述接收信号、所述正交信号以及所述本地伪码信号,生成第二乘积信号; 分别在一个历元时间内,对所述第一乘积信号和所述第二乘积信号进行积分,得 到第一累计信号和第二累加信号;所述第一累加信号和第二累加信号均包含:闪烁引入的 误差、高斯白噪声以及闪烁引入的加性非高斯噪声; 根据所述第一累加信号和第二累加信号,构建观测向量,采用相位锁定指示的自 适应方式,构建自适应观测向量; 根据预先设置的自适应无迹卡尔曼滤波载波跟踪算法和所述自适应观测向量,对 所述自适应无迹卡尔曼滤波载波跟踪算法的状态向量以及所述状态向量的协方差进行更 新; 根据所述状态向量的更新结果,生成控制字进行信号跟踪。 上述一种抗电离层闪烁的自适应无迹卡尔曼滤波载波跟踪环路及方法、装置、计 算机设备和存储介质,通过接收到信号构建包含非高斯噪声的累加信号,根据累加信号构 建观测向量,从而在观测向量中包含了非高斯噪声,一般而言,非高斯噪声难以估计,通过 相位锁定指示的自适应方式,对观测向量进行自适应估计,从而在不同的电离层闪烁条件 下,可以自适应的对观测向量进行预测,提高载波跟踪的准确性,然后通过自适应无迹卡尔 8 CN 111610540 A 说 明 书 5/14 页 曼滤波载波跟踪算法以及自适应观测向量,可以对载波进行准确跟踪。 附图说明 图1为一个实施例中自适应无迹卡尔曼滤波载波跟踪方法的流程示意图; 图2为一个实施例中仿真结构示意性模块图; 图3为一个实施例中仿真场景设置示意图; 图4为一个实施例中本发明方法与CPLL、EKF-PLL以及UKF-PLL载波跟踪算法的鉴 相误差标准差对比结果示意图; 图5为一个实施例中本发明方法与CPLL、EKF-PLL以及UKF-PLL载波跟踪算法的载 波跟踪失锁概率对比结果示意图; 图6为一个实施例中本发明方法与CPLL、EKF-PLL以及UKF-PLL载波跟踪算法的周 跳情况对比结果示意图; 图7为一个实施例中自适应无迹卡尔曼滤波载波跟踪装置的结构框图; 图8为一个实施例中计算机设备的内部结构图。











