
技术摘要:
本发明提供了一种工程车辆、一种远程控制端、一种工程车辆的控制系统和方法,工程车辆能够与远程控制端进行数据交互,工程车辆包括:视频采集模块、监测模块、视频处理模块、信息发送模块、第一接收模块和控制模块。通过对视频采集模块拍摄到的工况视频进行5G切片处理 全部
背景技术:
相关技术中,基于4G无线通信的远程无人挖掘机在进行数据交互时,其带宽已经 不能满足超清摄像头的需求,在现场演示或者运行无人挖掘机时,视频传输存在较大延时, 操作人员无法实时获取现场最新图像,故而无法准确做出操作指令,操作人员与无人挖掘 机的动作同步率较低。
技术实现要素:
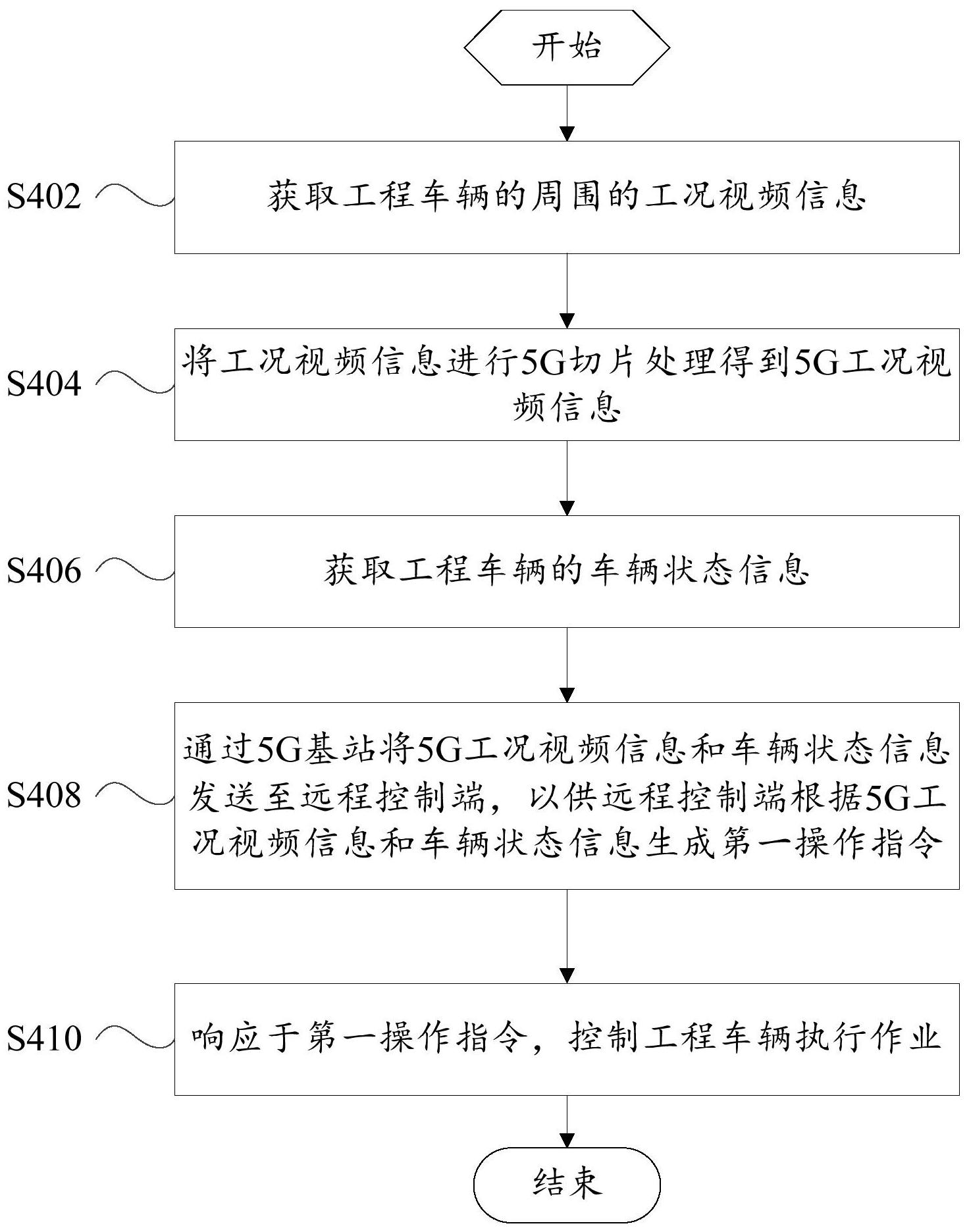
本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。 为此,本发明的第一方面提出了一种工程车辆。 本发明的第二方面提出了一种远程控制端。 本发明的第三方面提出了一种工程车辆的控制系统。 本发明的第四方面提出了一种工程车辆的控制方法,用于工程车辆。 本发明的第五方面提出了一种工程车辆的控制方法,用于远程控制端。 有鉴于此,本发明的第一方面提出了一种工程车辆,工程车辆能够与远程控制端 进行数据交互,工程车辆包括:视频采集模块,用于采集工程车辆周围的工况视频信息;监 测模块,用于采集工程车辆的车辆状态信息;视频处理模块,视频处理模块与视频采集模块 通信,用于对工况视频信息进行5G切片处理得到5G工况视频信息;信息发送模块,信息发送 模块分别与视频处理模块和监测模块通信,用于将5G工况视频信息和车辆状态信息发送至 5G基站,5G基站将5G工况视频信息和车辆状态信息发送至远程控制端;第一接收模块,用于 接收远程控制端根据5G工况视频信息和车辆状态信息发出的第一操作指令;控制模块,控 制模块与第一接收模块相连接,用于响应第一操作指令控制工程车辆执行作业。 本发明提供的工程车辆可以与远程控制端进行数据交互,进而基于无线通信实现 对工程车辆的远程控制,而无需驾驶员在工程车辆本体上进行作业,具体地,工程车辆的视 频采集模块通过多个超清摄像头从多个方位拍摄工程车辆各个位置的视频,进而获取到工 程车辆各个位置的工况视频信息,同时,工程车辆的监测模块采集工程车辆的车辆状态信 息,车辆状态信息为车速、油缸压力、工作臂载重、工作臂摆角、驾驶舱转角等反映车辆工作 状态的信息中的至少一种,视频处理模块与视频采集模块通信,将视频采集模块中摄像头 所采集到的工况视频进行5G切片处理进而得到5G工况视频信息,信息发送模块获取到5G工 况视频信息和车辆状态信息后,通过5G基站将5G工况视频信息和车辆状态信息传输给远程 控制端,远程控制端根据工程车辆上传的信息发出第一操作指令并将其传输给工程车辆的 第一接收模块,与第一接收模块相连的控制模块根据第一操作指令控制工程车辆上用于执 行各类作业动作的电机、液压机构运行,进而使工程车辆执行相应的作业动作。 4 CN 111583443 A 说 明 书 2/11 页 本发明提供的工程车辆通过对拍摄到的工况视频进行5G切片处理,实现了对大数 据量的高清5G工况视频信息及车辆状态信息的快速上传,一方面,降低了数据上传的延时, 使远程控制端能够快速获取到最新的工程车辆的工况视频信息和车辆状体信息,进而针对 当前工况做出有效的第一操作指令控制工程车辆执行作业,另一方面,工程车辆采集并上 传的视频为高清视频,大大提升了远程控制端的观察效果,进而做出更准确的判断。 另外,本发明提供的上述技术方案中的工程车辆还可以具有如下附加技术特征: 在上述技术方案中,进一步地,工程车辆能够与辅助控制端进行数据交互,工程车 辆还包括:第二接收模块,基于第二接收模块与辅助控制端的距离小于或等于距离阈值的 情况,第二接收模块用于接收辅助控制端发出的第二操作指令;控制模块还与第二接收模 块相连接,控制模块还用于响应第二操作指令控制工程车辆执行作业。 在该技术方案中,工程车辆除了可以与远程数据端进行数据交互,还可以与辅助 控制端进行数据交互,进而基于无线通信实现对工程车辆的远程控制,而无需驾驶员在工 程车辆本体上进行作业,具体地,辅助控制端为一种无线遥控器,当操作人员手持的辅助控 制端与工程车辆第二接收模块的距离小于或等于阈值距离时,操作人员可以通过辅助控制 端的各个按键发出对应的第二操作指令,工程车辆的第二接收模块负责接收第二操作指 令,与第二接收模块相连的控制模块根据第二操作指令控制工程车辆上用于执行各类作业 动作的电机、液压机构运行,进而使工程车辆执行相应的作业动作,本发明提供的工程车辆 可以接受两种不同的控制端的操作指令进而实现远程遥控,当需要到作业现场附近进行遥 控时,操作人员可在距离工程车辆阈值距离之内的范围采用辅助控制端进行遥控,当不需 要在作业现场附近进行指挥时,则可使用远程控制端执行遥控,操作人员可以根据工程车 辆的实际作业任务灵活选择使用远程控制端或辅助控制端,提高了工程车辆使用的灵活 性,扩大了工程车辆的使用范围。 进一步地,第一操作指令和第二操作指令的通讯协议相同,使工程车辆在接收不 同的操作指令时无需更改自身的通讯设置,进一步提升了控制的灵活性。 在上述任一技术方案中,进一步地,工程车辆包括车体、设置于车体上的驾驶室、 工作臂和执行端,执行端与工作臂相连接,视频采集模块包括:驾驶室视频采集模块,设置 于驾驶室,用于采集驾驶室周围的工况视频信息;车尾视频采集模块,设置于车体的尾部, 用于采集车尾周围的工况视频信息;工作臂视频采集模块,设置于工作臂,用于采集工作臂 周围的工况视频信息;执行端视频采集模块,设置于执行端,用于采集执行端周围的工况视 频信息;环境视频采集模块,环境视频采集模块布置于工程车辆的工作区域,用于采集工程 车辆周围环境的工况视频信息。 在该技术方案中,视频采集模块包括4个设置于工程车辆车体上的子视频采集模 块,分别对工程车辆驾驶室、车尾、工作臂和执行端周围的工况进行拍摄,视频采集模块还 包括1个设置于工程车辆附近的子视频采集模块,具体地,工程车辆附近立有标杆,环境视 频采集模块设置于标杆的顶端,用于拍摄工程车辆附近的作业区域,5个不同位置的子视频 采集模块从多个方位获取了工程车辆自身以及工程车辆周围作业区域的工况视频信息,使 后续远程控制端对工程车辆工况的观测更加全面,进而发出准确的第一操作指令,使工程 车辆更好地完成作业。 本发明的第二方面提出了一种远程控制端,远程控制端能够与上述任一技术方案 5 CN 111583443 A 说 明 书 3/11 页 的工程车辆进行数据交互,远程控制端包括:信息接收模块,用于接收通过5G切片处理得到 的工程车辆的5G工况视频信息和车辆状态信息;显示模块,用于在显示屏幕上显示5G工况 视频信息和车辆状态信息;操作模块,用于根据显示屏幕上显示的5G工况视频信息和车辆 状态信息做出操作动作;指令生成模块,用于生成与操作动作相对应的第一操作指令;指令 发送模块,用于将第一操作指令发送至5G基站,5G基站将第一操作指令发送至工程车辆;记 录模块,用于记录指令发送模块发出的第一操作指令和信息接收模块接收到的5G工况视频 信息和车辆状态信息。 该技术方案中,远程控制端可以与工程车辆进行数据交互,进而基于无线通信实 现对工程车辆的远程控制,而无需驾驶员在工程车辆本体上进行作业,具体地,远程控制端 的接收模块接收到通过5G切片处理得到的工程车辆的5G工况视频信息和车辆状态信息,随 后显示模块将高清的5G工况视频信息和车辆状态信息投射到多个显示屏幕上供操作人员 观看,操作人员根据屏幕上的画面和车辆状态信息,在操作模块上做出操作动作,该操作模 块的布局与工程车辆实际驾驶室中的布局相同,提升了操作人员的操作体验,使操作人员 更容易做出正确的操作动作,随后,指令生成模块根据操作动作生成与该动作对应的第一 操作指令,当同时做出多个操作动作时,指令生成模块还将多个对应生成的第一操作指令 进行打包,指令发送模块在获取到第一操作指令后,通过5G基站将第一操作指令发送至工 程车辆进而控制其完成相应的作业动作,记录模块将指令发送模块发出的第一操作指令和 信息接收模块接收到的5G工况视频信息和车辆状态信息记录下来,形成备份,当工程车辆 执行作业时出现故障或发生事故,或远程控制端出现故障时,记录模块可以向检修人员提 供数据支持,便于检修人员进行检修,操作人员也可以针对备份的数据展开分析,进而获知 远程控制端和工程车辆的配合情况。 本发明提供的远程控制端能够快速接收工程车辆所发送的高清5G工况视频信息 及车辆状体信息,并将接收到的信息显示在显示屏幕上,使操作人员能够对工程车辆的工 况信息及车辆状态进行实时观测,进而针对当前工况做出正确的操作动作,通过5G传输将 第一操作指令传回工程车辆,大大降低了第一操作指令传输的延时,进而使工程车辆的动 作与指令更加同步。 在上述任一技术方案中,进一步地,第一操作指令包括:前进、后退、左转、右转、回 转、工作臂抬升、工作臂下降、工作臂伸出和工作臂缩回中的至少一种。 在该技术方案中,可以根据不同的操作动作生成多种第一操作指令,控制工程车 辆根据第一操作指令完成多种作业动作,进而完成多种不同的作业任务,扩大了工程车辆 的使用范围。 本发明的第三方面提出了一种工程车辆的控制系统,包括:上述任一技术方案中 的工程车辆;上述任一技术方案中的远程控制端;以及辅助控制端;其中,工程车辆被配置 为与远程控制端进行数据交互,或工程车辆被配置为与辅助控制端进行数据交互。 本发明提供的工程车辆的控制系统,因包括上述任一技术方案中的工程车辆和远 程控制端,因此具有该工程车辆和该远程控制端的全部有益效果,在此不再赘述。工程车辆 的操作人员可以根据实际作业需求,灵活选择使用远程控制端或辅助控制端与工程车辆进 行数据交互。 进一步地,辅助控制端设有433MHZ的发射天线,用于发出第二操作指令,采用 6 CN 111583443 A 说 明 书 4/11 页 433MHZ天线发出的第二操作指令穿透性强,通讯距离远,适用于多种复杂的工况环境。 本发明的第四方面提出了一种工程车辆的控制方法,用于上述任一技术方案中的 工程车辆,工程车辆能够与远程控制端进行数据交互,控制方法包括:获取工程车辆的周围 的工况视频信息,将工况视频信息进行5G切片处理得到5G工况视频信息;获取工程车辆的 车辆状态信息;通过5G基站将5G工况视频信息和车辆状态信息发送至远程控制端,以供远 程控制端根据5G工况视频信息和车辆状态信息生成第一操作指令;响应于第一操作指令, 控制工程车辆执行作业。 本发明提供的工程车辆的控制方法,在对工程车辆进行控制时,首先通过多个超 清摄像头从多个方位拍摄工程车辆各个位置的视频,进而获取到工程车辆各个位置的工况 视频信息,随后将工况视频信息进行5G切片处理得到5G工况视频信息,之后获取工程车辆 的车辆状态信息,车辆状态信息为车速、油缸压力、工作臂载重、工作臂摆角、驾驶舱转角等 反映车辆工作状态的信息中的至少一种,获取到5G工况视频信息和车辆状态信息后,通过 5G基站将5G工况视频信息和车辆状态信息传输给远程控制端,远程控制端根据工程车辆上 传的信息生成第一操作指令并将其传输给工程车辆,最后工程车辆响应于第一操作指令并 执行相应的作业动作。 本发明提供的工程车辆的控制方法,通过对拍摄到的工况视频进行5G切片处理, 实现了对大数据量的高清5G工况视频信息及车辆状态信息的快速上传,一方面,降低了数 据上传的延时,使远程控制端能够快速获取到最新的工程车辆的工况视频信息和车辆状体 信息,进而针对当前工况做出有效的第一操作指令控制工程车辆执行作业,另一方面,工程 车辆采集并上传的视频为高清视频,大大提升了远程控制端的观察效果,进而做出更准确 的判断。 在上述任一技术方案中,进一步地,工程车辆与辅助控制端能够进行数据交互,控 制方法还包括:基于工程车辆与辅助控制端的距离小于或等于阈值距离的情况,接收辅助 控制端发出的第二操作指令;响应于第二操作指令,控制工程车辆执行作业。 在该技术方案中,工程车辆除了可以与远程数据端进行数据交互,还可以与辅助 控制端进行数据交互,进而基于无线通信实现对工程车辆的远程控制,而无需驾驶员在工 程车辆本体上进行作业,具体地,辅助控制端为一种无线遥控器,当操作人员手持的辅助控 制端与工程车辆的距离小于或等于阈值距离时,操作人员可以通过辅助控制端的各个按键 发出对应的第二操作指令,工程车辆接收第二操作指令,并响应于该指令,执行相应的作业 动作,本发明提供的工程车辆可以接受两种不同的控制端的操作指令进而实现远程遥控, 当需要到作业现场附近进行遥控时,操作人员可在距离工程车辆阈值距离之内的范围采用 辅助控制端进行遥控,当不需要在作业现场附近进行指挥时,则可使用远程控制端执行遥 控,操作人员可以根据工程车辆的实际作业任务灵活选择使用远程控制端或辅助控制端, 提高了工程车辆使用的灵活性,扩大了工程车辆的使用范围。 进一步地,第一操作指令和第二操作指令的通讯协议相同,使工程车辆在接收不 同的操作指令时无需更改自身的通讯设置,进一步提升了控制的灵活性。 在上述任一技术方案中,进一步地,工程车辆周围的工况视频信息具体包括以下 至少一种:驾驶室周围的工况视频信息、车尾周围的工况视频信息、工作臂周围的工况视频 信息、执行端周围的工况视频信息、整车周围的工况视频信息。 7 CN 111583443 A 说 明 书 5/11 页 在该技术方案中,获取工程车辆驾驶室、车尾、工作臂、执行端和整车作业区域周 围工况视频信息中的一种或其中多种组合,可以从多个方位获取工程车辆自身以及工程车 辆周围作业区域的工况视频信息,使后续远程控制端对工程车辆工况的观测更加全面,进 而发出准确的第一操作指令,使工程车辆更好地完成作业。 本发明的第五方面提出了一种工程车辆的控制方法,用于上述任一技术方案中的 远程控制端,远程控制端包括显示屏幕,控制方法包括:接收通过5G切片处理得到的工程车 辆的5G工况视频信息和车辆状态信息;通过显示屏幕显示5G工况视频信息和车辆状态信 息;根据显示的5G工况视频信息和车辆状态信息做出操作动作;生成与操作动作相对应的 第一操作指令;通过5G基站将第一操作指令发送至工程车辆。 该技术方案中,远程控制端可以与工程车辆进行数据交互,进而基于无线通信实 现对工程车辆的远程控制,而无需驾驶员在工程车辆本体上进行作业,具体地,远程控制端 的接收到通过5G切片处理得到的工程车辆的5G工况视频信息和车辆状态信息,随后将高清 的5G工况视频信息和车辆状态信息投射到多个显示屏幕上供操作人员观看,操作人员根据 屏幕上显示的5G工况视频信息和车辆状态信息做出操作动作,随后,根据操作动作生成与 该动作相对应的第一操作指令,当同时做出多个操作动作时,还将多个对应生成的第一操 作指令进行打包,最后通过5G基站将第一操作指令发送至工程车辆进而控制其完成相应的 作业动作。 进一步地,远程控制端还对第一操作指令、5G工况视频信息和车辆状态信息进行 记录备份,当工程车辆执行作业时出现故障或发生事故,或远程控制端出现故障时,可以向 检修人员提供数据支持,便于检修人员进行检修,操作人员也可以针对备份的数据展开分 析,进而获知远程控制端和工程车辆的配合情况。 本发明提供工程车辆的控制方法,远程控制端能够快速接收工程车辆所发送的高 清5G工况视频信息及车辆状体信息,并将接收到的信息显示在显示屏幕上,使操作人员能 够对工程车辆的工况信息及车辆状态进行实时观测,进而针对当前工况做出正确的操作动 作,通过5G传输将第一操作指令传回工程车辆,大大降低了第一操作指令传输的延时,进而 使工程车辆的动作与指令更加同步。 附图说明 本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得 明显和容易理解,其中: 图1示出了根据本发明的一个实施例的工程车辆的结构框图; 图2示出了图1所示实施例的视频采集模块的布局示意图; 图3示出了根据本发明的一个实施例的远程控制端的结构框图; 图4示出了根据本发明的一个实施例的辅助控制端的结构框图; 图5示出了根据本发明的一个实施例的工程车辆的控制方法的流程图; 图6示出了根据本发明的另一个实施例的工程车辆的控制方法的流程图; 图7示出了根据本发明的又一个实施例的工程车辆的控制方法的流程图; 图8示出了根据本发明的一个实施例的工程车辆的控制系统的信息交互示意图; 图9示出了图8所示实施例的工程车辆的控制系统中机载馈控设备的信息交互示 8 CN 111583443 A 说 明 书 6/11 页 意图。 其中,图1至图9中的附图标记与部件名称之间的对应关系为: 100工程车辆,1001车体,1002驾驶室,1003工作臂,1004执行端,102视频采集模 块,1022驾驶室视频采集模块,1023车尾视频采集模块,1024工作臂视频采集模块,1025执 行端视频采集模块,1026环境视频采集模块,104监测模块,106视频处理模块,108信息发送 模块,110第一接收模块,112第二接收模块,114控制模块,200远程控制端,202信息接收模 块,204显示模块,206操作模块,208指令生成模块,210指令发送模块,212记录模块,300辅 助控制端,302按键,304天线,400机载馈控设备,500应用服务器,600数据库服务器,700驾 驶模拟舱,800 5G基站。











