
技术摘要:
本发明公开了一种基于高光谱数据校正的内陆水体FUI水色指数提取方法,使用基于R,G,B波段的色度角提取方法,利用CIE色度系统的RGB与XYZ之间的转换关系计算得到R,G,B波段图像对应的颜色三刺激值。此外,使用GF‑5高光谱影像与实测高光谱数据代替IOCCG数据库来进行色 全部
背景技术:
FUI水色指数在利用遥感技术进行长时间序列的水质监测上具有很好的研究前景 和优势,并且可以与历史水色数据结合起来进一步研究更大时间尺度的水质状况变化。计 算FUI的关键在于获取水体离水反射率光谱Rrs(λ),并对离水反射率光谱与CIE色度系统的 颜色匹配函数的乘积分别进行积分,从而获得CIE系统中的X、Y、Z三刺激值并计算色度角α 和FUI水色指数。FUI水色的提取精度取决于色度角α的计算精度。然而目前多数卫星遥感传 感器只能获取部分离散光谱范围的电磁辐射,在可见光范围内只有少数几个离散波段,如 Landsat系列影像,这些影像在色度角α的计算上由于波段过少而不可避免地有较大偏差。 Wored,Wernand等人采用波段线性插值方法对不同波段进行插值,通过插值的方 法获取多光谱数据不具有的几个波段,插值后再通过积分计算色度角α,并基于IOCCG光谱 数据库利用多项式模型消除插值带来的偏差。然而,这种方法对于内陆水体的FUI提取有两 个问题:(1)波段线性插值方法用于中高光谱分辨率的MERIS,SentinelOLCI图像尚可,但是 对于可见光内只有R、G、B等少数几个波段的低光谱分辨率的Landsat8、GF-1/2等图像却会 有很大的误差。因为这些图像波段稀疏,且第一个波段和最后一个波段距离400nm和710nm 都比较远,这两个区间内的积分不可忽略,在这种情况下使用波段线性插值会造成颜色坐 标偏差,进而对色度角α和FUI的计算带来较大误差;(2)IOCCG数据库主要是大洋Ⅰ类水体的 模拟数据,内陆水体光学成分复杂,使用IOCCG数据库来校正色度角α,提取内陆水体FUI不 可避免地会有误差。
技术实现要素:
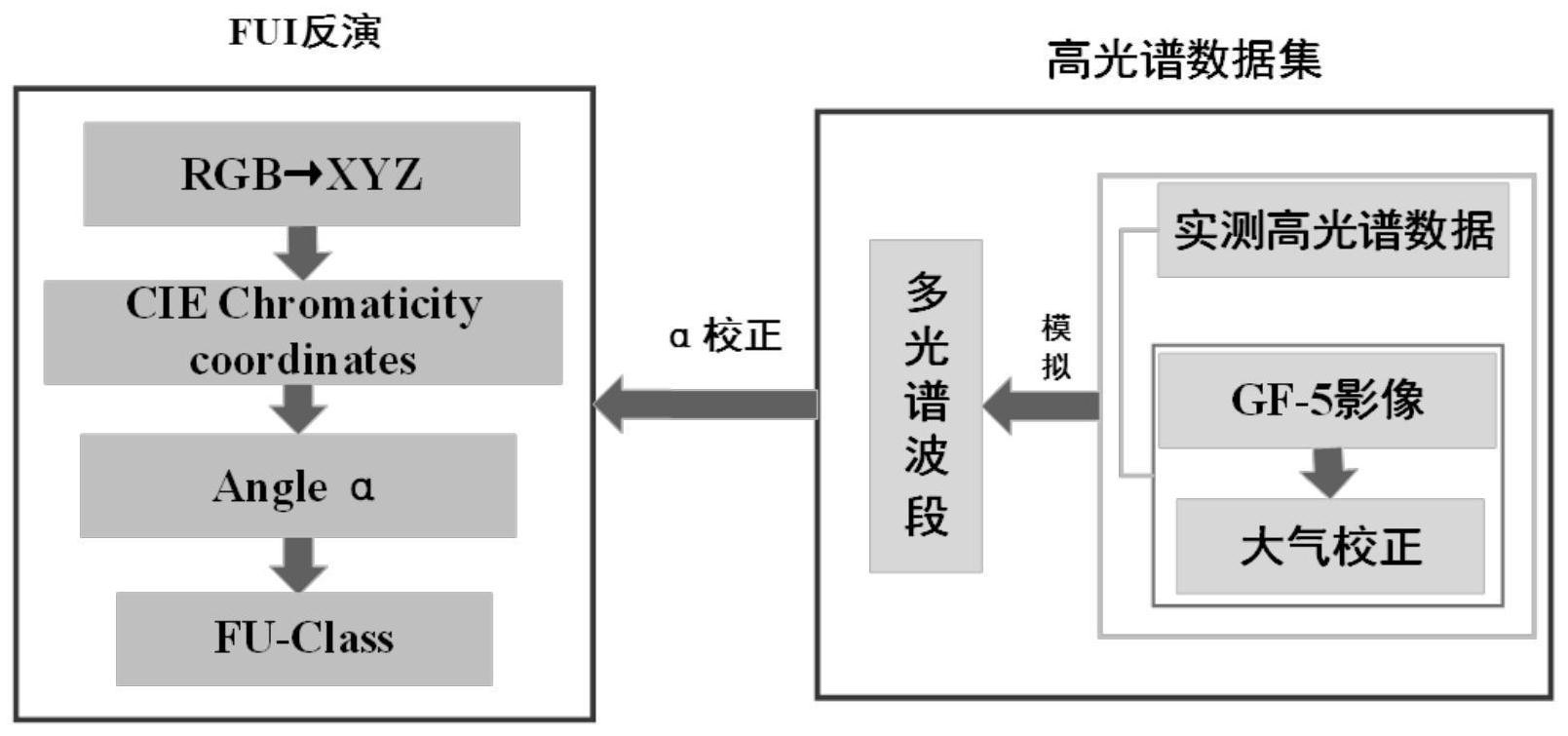
针对现有技术的不足,本发明旨在提供一种基于高光谱数据校正的内陆水体FUI 水色指数提取方法。 为了实现上述目的,本发明采用如下技术方案: 一种基于高光谱数据校正的内陆水体FUI水色指数提取方法,包括如下步骤: S1、通过CIE-XYZ色度系统中三原色RGB与三刺激值XYZ之间的转换关系,计算得内 陆水体遥感影像的R,G,B波段对应的三刺激值X,Y,Z; S2、根据步骤S1计算得到的R,G,B波段对应的三刺激值X,Y,Z,按照下式计算得到 其在二维色度空间上对应的色度坐标(x,y): 4 CN 111595791 A 说 明 书 2/8 页 S3、根据色度坐标计算色度角α; 在二维色度空间中,将等能白光点作为原点,计算等能白光点与步骤S2中计算得 到的点(x,y)间的向量和X轴正方向之间的角度α,即α为色度角; S4、使用高光谱数据建立误差多项式拟合公式: S4.1、利用实测高光谱数据测量仪器获得内陆水体实测高光谱数据,使用获得的 内陆水体实测高光谱数据模拟多光谱影像的R,G,B波段,并据此计算得到基于实测高光谱 数据模拟的多光谱影像色度角;另外,计算和内陆水体实测高光谱数据同一时间段的多光 谱影像数据的色度角; S4.2、利用GF-5影像数据模拟出多光谱影像波段R,G,B的反射率值,并根据模拟出 的多光谱影像波段R,G,B的反射率值计算得到基于GF-5影像数据模拟的多光谱影像色度 角;另外,计算和GF-5影像数据同一时间段的多光谱影像数据的色度角; S4.3、记基于实测高光谱数据模拟的多光谱影像色度角和基于GF-5影像数据模拟 的多光谱影像色度角为αhyper,基于其对应时间的多光谱影像计算得到的色度角为αmulti;根 据公式Δ=αhyper-αmulti计算到所有相对应的αmulti和αhype之间的色度角误差Δ;对Δ和αmulti 制作散点图并添加趋势线,误差多项式拟合公式即为趋势线的多项式预测; S5、将步骤S3计算得到的色度角α代入步骤S4得到的误差多项式拟合公式中得到 对应的色度角误差,在α基础上加上对应的色度角误差,即可得到校正后的色度角α’; S6、将校正后的色度角α’对照FUI查找表,得到水体的FUI水色值。 进一步地,步骤S1中,三原色RGB与三刺激值XYZ之间的转换关系如下: X=2.7689R(645) 1.7517G(555) 1.1302B(469); Y=1.0000R(645) 4.5907G(555) 0.0601B(469); Z=0.0000R(645) 0.0565G(555) 5.5943B(469); 根据上式计算得到R,G,B波段对应的三刺激值X,Y,Z值。 进一步地,步骤S4.1中,使用获得的内陆水体实测高光谱数据模拟多光谱影像波 段R,G,B的反射率的公式如下: 式中,λm为所模拟的传感器通道波段,[λf,λt]为所要模拟的波段λm的光谱范围,f (λ)为所模拟的传感器的光谱响应函数,Lw(λ)为水面以上离水辐亮度,Ed(λ)为下行太阳光 入射水面的总辐照度。 进一步地,步骤S4.2中,GF-5影像通过以下公式利用多光谱影像的光谱响应函数 分别模拟多光谱影像波段R,G,B的反射率值: 5 CN 111595791 A 说 明 书 3/8 页 式中,Xλ表示GF-5影像数据的Rrs值,g函数代表所模拟的传感器的光谱响应函数, [λ1,λ2]为所要模拟的波段的光谱范围。 本发明的有益效果在于:本发明使用基于R,G,B波段的色度角提取方法,利用CIE 色度系统的RGB与XYZ之间的转换关系计算得到内陆水体遥感影像R,G,B波段对应的颜色三 刺激值,然后使用GF-5高光谱影像与实测高光谱数据代替IOCCG数据库来进行色度角α的校 正,使之更适合内陆Ⅱ类水体的水色提取。 附图说明 图1为本发明实施例的方法流程示意图; 图2为CIE-XYZ色度图与FUI水色指数21个色度坐标划分示意图; 图3为本发明实施例中基于GF-5高光谱与实测高光谱数据对RGB方法得到的 Landsat 8OLI的色度角误差校正; 图4为本发明实施例中基于色度角α校正后算法提取的北京市水体FUI。











