
技术摘要:
本发明提供一种用于室内实时监控的ViBe‑ID前景检测方法,包括:输入视频序列,使用结合三帧差法的背景建模方法进行背景建模,并用ViBe算法的前景检测算法进行前景提取,然后采用背景模型的分区更新策略完成背景模型更新,采用形态学方法完善前景区域,最后将前景区域 全部
背景技术:
目前主流的移动目标检测技术主要包括帧间差分法、光流法、背景差分法,其中, 帧间差分法是一种利用两帧相邻图像中同一像素点的灰度值进行差分运算,并通过判断灰 度差是否大于阈值从而对前景像素和背景像素进行二值分类的方法,该方法运算量小、适 用性广,但划分的前景区域往往不够完整;光流法是一种通过研究视频图像序列的光流场, 利用图像中运动物体的光流信息和背景的光流信息的差异性来确定运动物体的位置,进而 检测运动目标的方法,该方法准确率较高,对于光照的鲁棒性较强,但算法的时间复杂度很 高,对于硬件环境的要求很高,不适用于实际;背景差分法是一种先建立背景模型,然后将 视频的每一帧图像与背景图像在相同像素点的灰度值进行差分运算,并通过比较阈值来确 定背景、前景区域的方法,该方法相比于光流法运算速度更快,相比于帧间差分法能更好的 提取前景区域,所以被广泛运用于实际生活中。 背景差分法的主要步骤包括背景建模、背景更新、目标检测三个部分,其中,背景 建模的好坏直接影响到前景检测的精确率,是最关键的部分。传统的背景建模方法有:均值 法、中值法、单高斯模型法、混合高斯模型法、码本模型法等。其中,均值法和中值法是将前 景视作噪声,针对连续图像序列中的像素,用累计平均值或取中值去除噪声的建模方法;单 高斯模型法和混合高斯模型法是利用单个或多个高斯函数对背景进行拟合的背景建模方 法;码本模型法则是为每个像素建立时间序列模型从而构建背景模型的方法。然而,上述背 景建模方法都需要足够时长的视频序列进行背景建模,这意味着这些背景建模方法由于初 始化时间太长而不能有效运用于实时的运动目标检测。 ViBe(Visual Background Extractor)算法较为有效地解决了上述问题,ViBe算 法是一种针对像素级建立背景模型并和当前帧作背景差分的算法。该算法利用像素在同一 区域内具有相近像素值这一特点,仅选取视频的第一帧图像进行背景初始化,但该方法也 存在两点不足:(1)当视频的第一帧图像中存在运动目标时,前景像素被当成背景像素融入 到背景建模中,这将会造成“鬼影”现象;(2)当视频图像的光照强度突变时,比如室内的开 关灯操作造成的光照骤变现象,图像的大部分区域会被检测为前景,产生“泛白”现象。
技术实现要素:
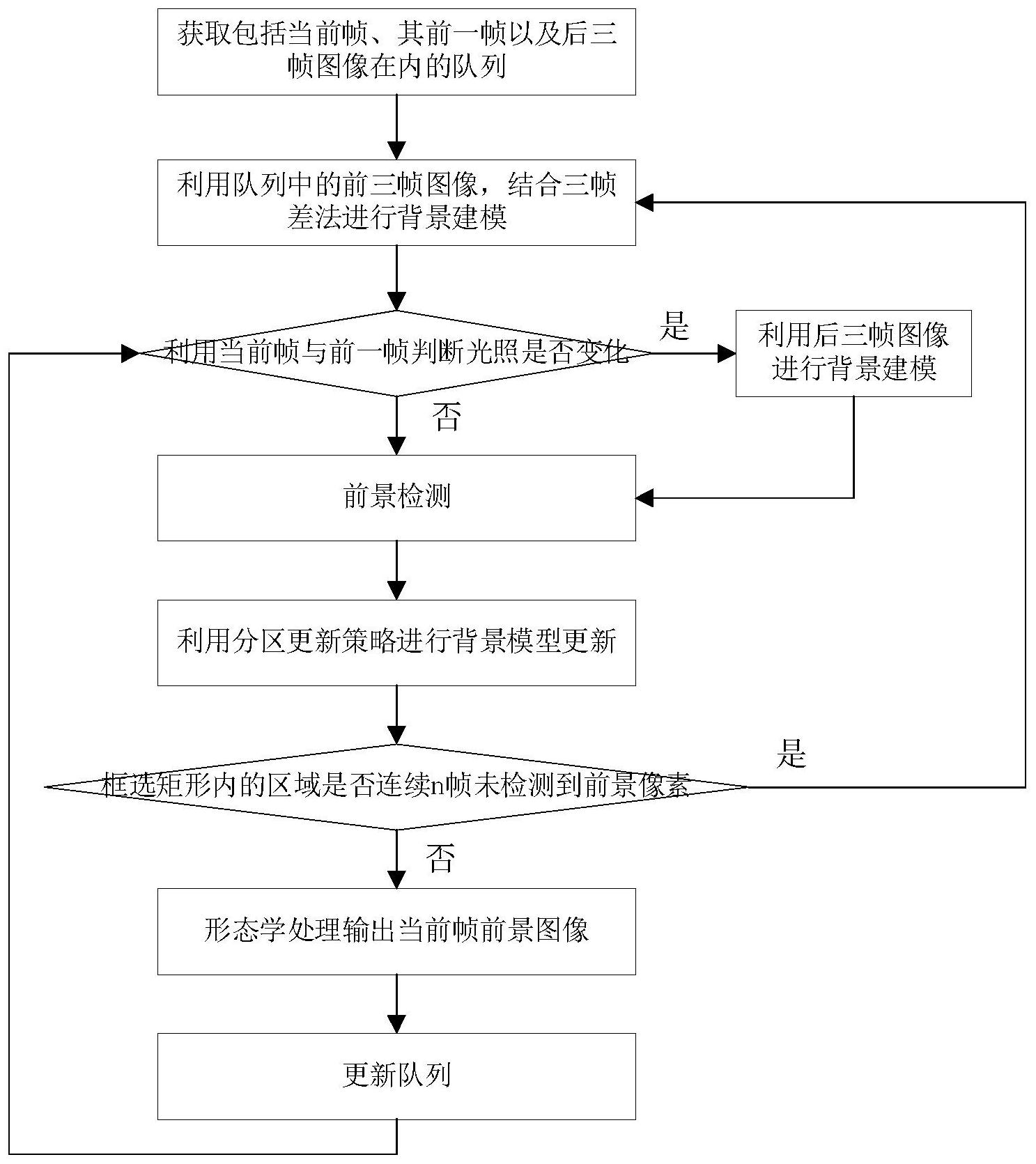
有鉴于此,本发明提供了一种用于室内实时监控的ViBe-ID前景检测方法,在不牺 牲原ViBe算法对于前景检测的实时性、准确性的基础上,有效消除“鬼影”和光照骤变带来 的“泛白”现象,相比ViBe算法更适用于室内环境的前景检测。 本发明提供一种用于室内实时监控的ViBe-ID前景检测方法,包括以下步骤: S1、实时获取室内监控视频并做灰度化处理,将当前帧的前一帧图像、当前帧图像 4 CN 111553931 A 说 明 书 2/5 页 以及当前帧的后三帧图像存储在队列中; S2、采用三帧差法处理队列中的前三帧图像,得到前景区域,然后获取将所述前景 区域包括在内的框选矩形,对于所述框选矩形外的区域,采用ViBe算法进行背景建模,并为 图像中的每一像素点设置初始值为0的滞留值; S3、选取队列中的前两帧图像,采用帧间灰度均值差法判断所述前两帧图像是否 发生了光照骤变,若是,则利用队列中的后三帧图像重新进行步骤S2中的背景建模,然后执 行步骤S4,否则继续执行步骤S4; S4、对于当前帧图像中位于框选矩形区域内的像素,采用三帧差法进行前景检测, 对于当前帧图像中位于框选矩形区域外的像素,采用ViBe算法进行前景检测;若像素被检 测为前景像素,则该像素的滞留值加1,若像素被检测为背景像素,则该像素的滞留值清零; 若某像素的滞留值超过阈值,则该像素被强制判定为背景像素; S5、使用背景模型分区更新策略进行背景模型更新,并判断当前帧图像中位于框 选矩形内的区域是否连续n帧均未检测到前景像素,若是,回到步骤S2重新进行背景建模, 否则继续执行步骤S6; S6、对完成背景模型更新后的当前帧图像进行形态学处理,得到二值化的前景图 像,完成对当前帧图像的处理过程;继续实时获取监控视频中的图像并做灰度化处理,将下 一帧图像作为当前帧图像对队列进行更新,回到步骤S3。 进一步地,所述步骤S2的具体过程为: S21、采用三帧差法对所述队列中的前三帧图像进行处理,得到前景区域; S22、采用OpenCV库提供的boundingRect方法获取能框选所述前景区域的最小轮 廓的矩形的左上点像素坐标(p0,q0)以及所述矩形的宽w、高h,并利用横向补偿值l1以及纵 向补偿值l2扩大所述矩形区域,得到框选矩形的左上点像素坐标(p0-l1,q0-l2)及右下点像 素坐标(p0 w l1,q0 h l2); S23、判断图像中的任一像素v(x)是否位于所述框选矩形外,若是,则建立所述像 素对应的样本集Sample(v(x))={vi|i=1,2,…,N,β},其中,vi表示样本,N表示样本个数,β 表示初始值为0的滞留值,所述样本由像素v(x)的邻域八像素中随机选取N次得到;否则,为 该像素设置初始值为0的滞留值;对图像中的所有像素进行判断,完成背景模型的建立。 进一步地,所述步骤S21中,采用三帧差法对所述前三帧图像进行处理的过程为: 对图像中的任一像素点(p,q),根据像素值计算: D(p,q)=δ1(p,q)|δ2(p,q), 其中,f0(p,q)、f1(p,q)、f2(p,q)依次表示当前帧的前一帧图像、当前帧图像、当前 帧的后一帧图像中像素点(p,q)处的像素值,T表示设定的像素差阈值;|表示逻辑或操作,D (p,q)表示像素点(p,q)处的判断值,若D(p,q)=1,则该像素点(p,q)为前景像素,对图像中 的所有像素进行判断,得到前景区域。 进一步地,所述步骤S3中,所述帧间灰度均值差法的判断公式为: |mean0-mean1|>Y, 5 CN 111553931 A 说 明 书 3/5 页 式中,mean1表示当前帧图像的像素灰度均值,mean0表示当前帧的前一帧图像的像 素灰度均值,Y表示设定的光照阈值;若所述判断公式成立,则认为发生了光照骤变,否则, 认为未发生光照骤变。 进一步地,所述步骤S4中,采用ViBe算法进行前景检测的过程为: #{SR(v(x))∩{v1,v2,…,vN}}<#min, 式中,v(x)表示框选矩形区域外的待检测像素,SR(v(x))表示图像中与所述待检 测像素v(x)的欧氏距离小于R的区域,{v1,v2,…,vN}表示像素v(x)对应的样本集,#{·}表 示求集合内元素数目,#min表示设定的前景检测阈值;若所述样本集中与所述待检测像素v (x)的欧氏距离小于R的像素的个数小于阈值#min,则所述待检测像素v(x)为前景像素,否则 为背景像素。 进一步地,所述步骤S5中,所述背景模型分区更新策略具体为: 对于当前帧图像中位于框选矩形外的区域,若像素被检测为背景像素,则所述像 素有 的概率更新其对应的样本集, 表示设定的更新值;若像素被检测为前景像素,则 不进行背景模型更新; 对于当前帧图像中位于框选矩形内的区域,不参与背景模型更新。 进一步地,所述当框选矩形外的像素被检测为背景像素时,所述像素有 的概 率随机替换其对应的样本集中的某一元素,从而完成对样本集的更新。 进一步地,所述步骤S6中,所述形态学处理的过程包括先膨胀后腐蚀,然后进行连 通性检测,最后剔除图像中面积小于阈值的前景区域。 本发明提供的技术方案带来的有益效果是:在不损失ViBe原算法的实时性、准确 性的基础上,能有效消除“鬼影”和光照骤变带来的“泛白”现象。 附图说明 图1是本发明实施例提供的用于室内实时监控的ViBe-ID前景检测方法的流程图; 图2是本发明实施例提供的采用ViBe算法建立背景模型时样本数据的选取示意 图; 图3是本发明实施例提供的采用ViBe算法进行前景检测的示意图。











