
技术摘要:
本发明提供了一种基于ADRC的无人机自抗扰控制系统,涉及无人机控制领域,包括:二阶微分器、非线性反馈器、三阶状态观测器、第一比例调节器以及第二比例调节器;二阶微分器的输出量为第一输出量以及第二输出量;三阶状态观测器的输出量为第三输出量、第四输出量以及第 全部
背景技术:
在飞行过程中无人机将受到各种气流干扰、地面效应、陀螺效应以及螺旋桨挥舞 特性等影响,为应对轻羽化无人机的这些外部随机干扰,对控制算法的鲁棒性提出了很强 的要求,需要对PIXHAWK飞控程序进行改进。 目前已有的PIX飞行控制系统是基于PID控制思想所设计的,在实际应用中的效果 并不是很好。对于飞机所受到的外界干扰,超调、震动及静态误差的情况依然存在。 综上所述,现有技术中,无人机系统的鲁棒性有待提高,同时无人机的控制存在, 超调、震动及静态误差的技术问题。
技术实现要素:
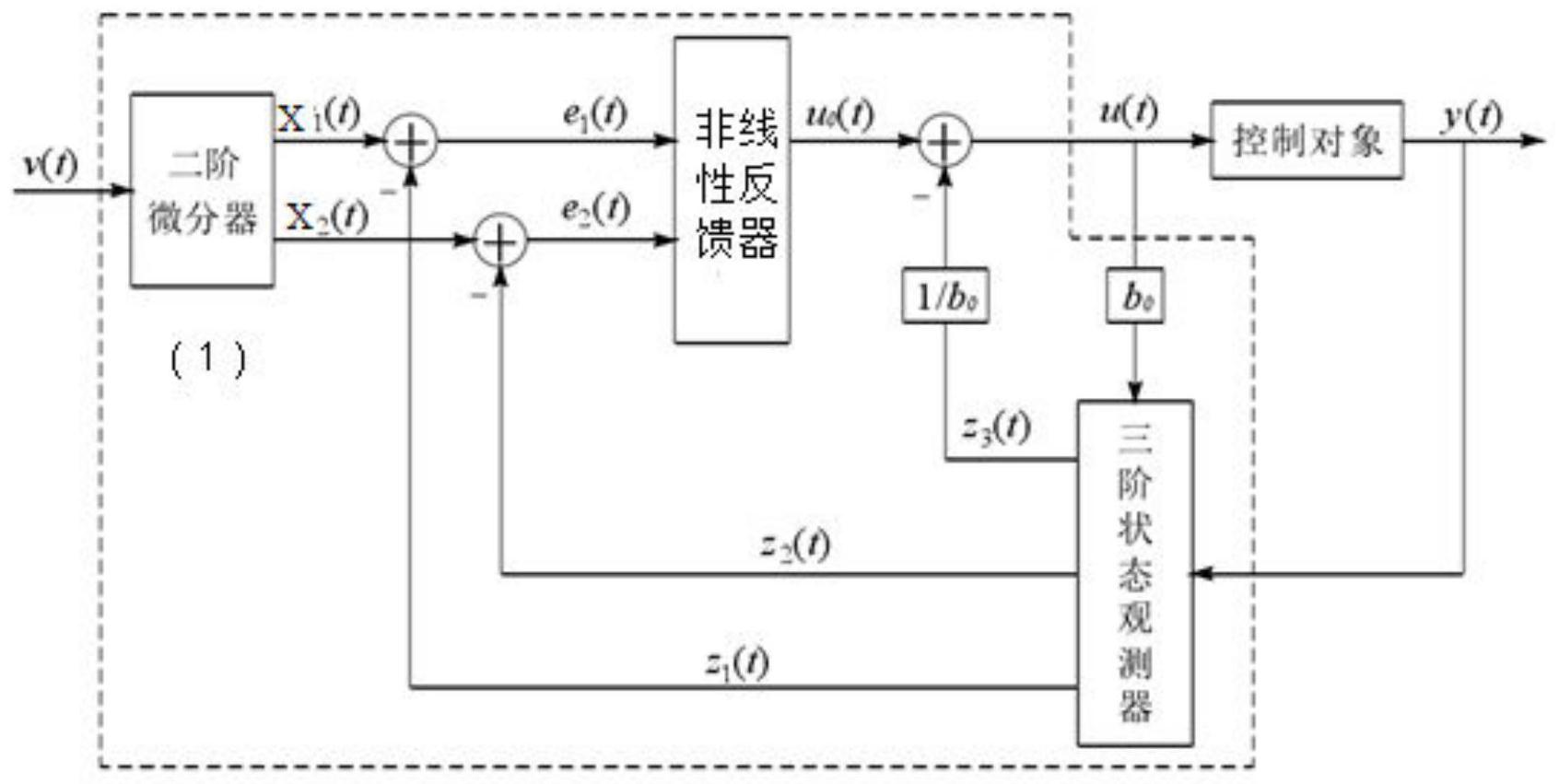
有鉴于此,本发明的目的在于提供一种基于ADRC的无人机自抗扰控制系统,以缓 解现有技术中无人机的控制存在,超调、震动及静态误差的技术问题,同时提高控制系统的 鲁棒性。 第一方面,本发明实施例提供了一种基于ADRC的无人机自抗扰控制系统,包括:二 阶微分器、非线性反馈器、三阶状态观测器、第一比例调节器以及第二比例调节器; 所述二阶微分器的输出量为第一输出量以及第二输出量; 所述三阶状态观测器的输出量为第三输出量、第四输出量以及第五输出量; 所述第一输出量与所述第三输出量经过比较环节得到第一输入量; 所述第二输出量与所述第四输出量经过比较环节得到第二输入量; 所述第一输入量与所述第二输入量共同作为所述非线性反馈器的输入量; 所述第五输出量经过所述第一比例调节器后,与所述非线性反馈器的输入量经过 比较环节构成反馈并获取所述第六输出量; 所述第六输出量作为被控对象的输入量对所述被控对象进行控制; 所述第六输出量通过所述第二比例调节器后,与所述被控对象的输出量共同构成 所述状态观测器的输入量; 所述第一比例调节器与所述第二比例调节器的参数呈倒数关系。 优选的,所述第一输出量为俯仰角目标角速度、偏航角目标角速度以及滚转角目 标角速度的任意一种; 所述第二输出量为俯仰角目标角加速度、偏航角目标角加速度以及滚转角目标角 加速度的任意一种; 所述第三输出量为俯仰角实际角速度、偏航角实际角速度以及滚转角实际角速度 的任意一种; 4 CN 111580541 A 说 明 书 2/6 页 所述第四输出量为俯仰角实际角加速度、偏航角实际角加速度以及滚转角实际角 加速度的任意一种; 所述第五输出量为系统的扰动。 优选的,所述二阶微分器满足如下要求: x1—第一输出量; x2—第二输出量; v(t)—参考信号; r—快速因子(人为设定的一个参数); sign—符号函数; 所述非线性反馈器满足如下关系 z1—第三输出量; z2—第四输出量; z3—第五输出量; f(x1,x2)—非线性模型; β01、β02、β03—人为设定的参数; 非线性反馈控制律 所述非线性反馈器满足如下规律: u0=-fhan(e1,ce2,r,h1); 其中,fhan—最速控制综合函数,e1,e2—被观测量,c—阻尼因子,r—快速因子, h1—滤波因子。 本发明实施例带来了以下有益效果:本发明提供了一种基于ADRC的无人机自抗扰 控制系统,包括:二阶微分器、非线性反馈器、三阶状态观测器、第一比例调节器以及第二比 例调节器;二阶微分器的输出量为第一输出量以及第二输出量;三阶状态观测器的输出量 为第三输出量、第四输出量以及第五输出量;第一输出量与第三输出量经过比较环节得到 第一输入量;第二输出量与第四输出量经过比较环节得到第二输入量;第一输入量与第二 输入量共同作为非线性反馈器的输入量;第五输出量经过第一比例调节器后,与非线性反 馈器的输入量经过比较环节构成反馈并获取第六输出量;第六输出量通过第二比例调节器 后,与被控对象的输出量共同构成所述状态观测器的输入量;第一比例调节器与第二比例 调节器的参数呈倒数关系。通过本发明提供的系统可以缓解现有技术中无人机的控制存 在,超调、震动及静态误差的技术问题,同时提高控制系统的鲁棒性。 本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变 5 CN 111580541 A 说 明 书 3/6 页 得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书 以及附图中所特别指出的结构来实现和获得。 为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合 所附附图,作详细说明如下。 附图说明 为了更清楚地说明本发明











