
技术摘要:
本申请公开了一种深度相机、电子设备及控制方法。深度相机包括光发射模组、光接收模组及处理电路。光发射模组用于在一个子周期内发送一个光脉冲信号,在一个帧周期内发送多个光脉冲信号,帧周期包括多个连续的子周期。光接收模组包括像素,像素包括多个抽头,多个抽头 全部
背景技术:
脉冲调制式I-TOF(Indirect-Time of Flight,I-TOF)三维测距技术是利用对反 射激光脉冲延 迟的间接测量来获取深度数据的。与连续调制式I-TOF相比,脉冲调制式I- TOF具有占空比 低、节省功耗等优势。然而,目前的脉冲调制式I-TOF的测距精度较差。
技术实现要素:
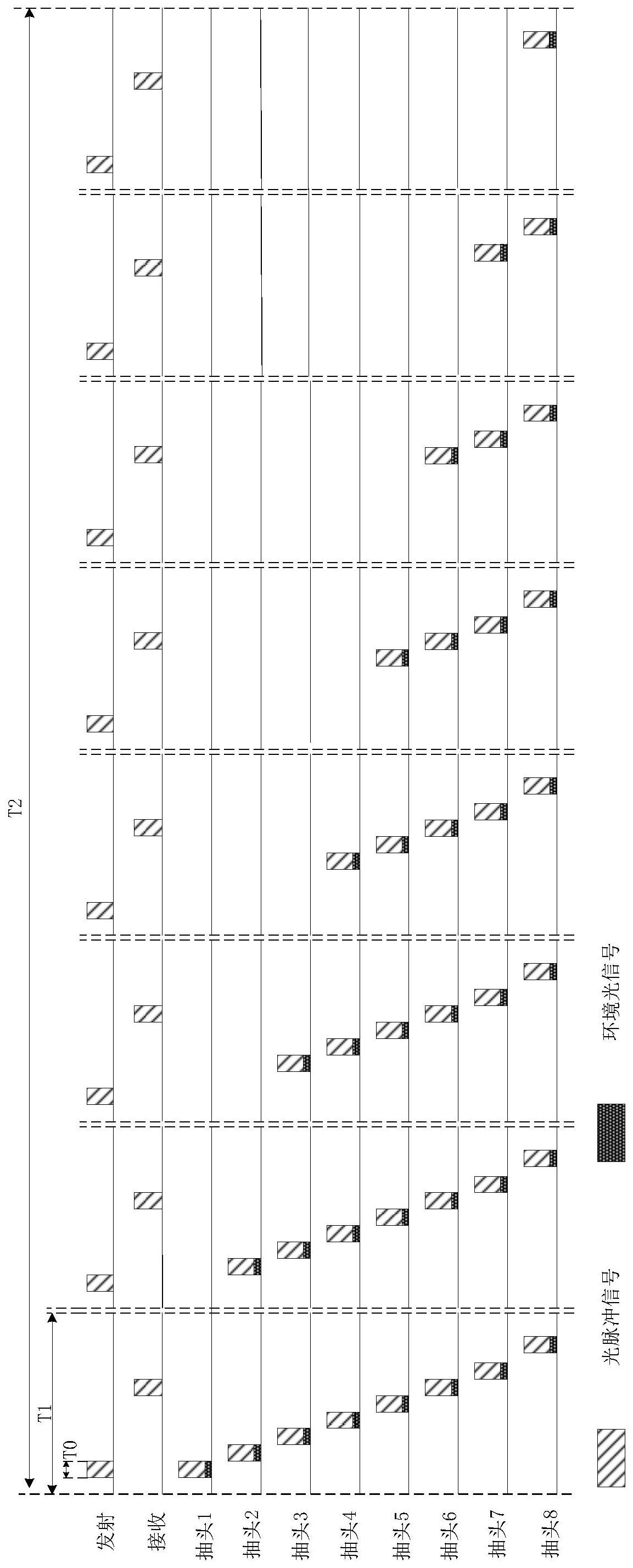
本申请实施方式提供了一种深度相机、电子设备及控制方法。 本申请实施方式的深度相机包括光发射模组、光接收模组及处理电路。所述光发 射模组 用于在一个子周期内发送一个光脉冲信号,在一个帧周期内发送多个所述光脉冲 信号,所述 帧周期包括多个连续的所述子周期。所述光接收模组包括像素,所述像素包括 多个抽头,所 述多个抽头获取由所述光脉冲信号和/或环境光信号生成的多个电信号,任 意两个所述抽头 的开启时间不重叠,且任意两个所述抽头在所述帧周期内的开启频率不 同。所述处理电路用 于根据所述多个电信号计算被摄场景的深度信息。 本申请实施方式的电子设备包括壳体及深度相机。所述深度相机与所述壳体结 合。所述 深度相机包括光发射模组、光接收模组及处理电路。所述光发射模组用于在一个 子周期内发 送一个光脉冲信号,在一个帧周期内发送多个所述光脉冲信号,所述帧周期包 括多个连续的 所述子周期。所述光接收模组包括像素,所述像素包括多个抽头,所述多个 抽头获取由所述 光脉冲信号和/或环境光信号生成的多个电信号,任意两个所述抽头的开 启时间不重叠,且 任意两个所述抽头在所述帧周期内的开启频率不同。所述处理电路用于 根据所述多个电信号 计算被摄场景的深度信息。 本申请实施方式的控制方法用于深度相机。所述深度相机包括光发射模组及光接 收模组。 所述光接收模组包括像素,所述像素包括多个抽头。所述控制方法包括:所述光发 射模组在 一个子周期内发射一个光脉冲信号,在一个帧周期内发送多个所述光脉冲信号, 所述帧周期 包括多个连续的所述子周期;所述多个抽头获取由所述光脉冲信号和/或环境 光信号生成的 多个电信号,任意两个所述抽头的开启时间不重叠,且任意两个所述抽头在 所述帧周期内的 开启频率不同;及根据所述多个电信号计算被摄场景的深度信息。 本申请实施方式的深度相机、电子设备及控制方法通过在光接收模组中设置多个 抽头, 多个抽头可以在一个帧周期内以不同的开启频率开启,从而可以使得各个抽头能够 获取到信 噪比较高的电信号,根据信噪比较高的电信号算出来的深度信息的精度也较高。 本申请实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的 描述中 变得明显,或通过本申请的实践了解到。 4 CN 111580119 A 说 明 书 2/10 页 附图说明 本申请的上述和/或附加的方面和优点可以从结合下面附图对实施方式的描述中 将变得 明显和容易理解,其中: 图1是本申请某些实施方式的深度相机的示意图; 图2是本申请某些实施方式的深度相机中像素的结构示意图; 图3是本申请某些实施方式的深度相机中像素的结构示意图; 图4是本申请某些实施方式的深度相机中像素的结构示意图; 图5是本申请某些实施方式的深度相机中像素的结构示意图; 图6是本申请某些实施方式的深度相机中的工作时序示意图; 图7是本申请某些实施方式的电子设备的示意图; 图8是本申请某些实施方式的控制方法的流程示意图。











