
技术摘要:
本发明涉及一种具有阻尼电阻的MMC的子模块控制方法及装置。其中该控制方法,包括如下步骤:获取MMC电容电压波动极值和电容电压参考值,将电容电压波动极值和电容电压参考值通过PI调节得到实际电容电压波动率,进而计算出电容电压波动阈值的上限、下限;将投入状态的子 全部
背景技术:
模块化多电平换流器(MMC)作为一种有良好输出特性的电力电子结构,由于其模 块化特征、良好的扩展性、较小的输出电压谐波等优点,已经广泛应用于直流输电工程中。 考虑经济性,模块化多电平换流器一般采用半桥子模块结构,最大的缺陷在于当直流侧发 生双极短路时,故障电流通过桥臂电抗、平波电抗及半桥子模块反并联二极管构成的回路 续流,导致故障无法快速消除,使柔直阀承受巨大的短路冲击。 模块化多电平换流器桥臂增加阻尼电阻能够提升柔直阀直流故障的处理能力,具 有快速衰减故障电流,降低故障恢复时间等优势。但是,由阻尼电阻构成的阻尼模块本身不 输出电平,需要从相邻半桥子模块的电容取电,这就导致了同时给阻尼模块供电的半桥子 模块损耗更大,而且存在半桥子模块的电容电压波动范围更大的问题(即比无阻尼模块的 MMC的半桥子模块的电容电压波动范围大)。 半桥子模块(即子模块)的电容电压波动范围一直是MMC设计及其正常运行的重要 参数。在系统参数一定的条件下,电容电压的波动范围主要受控制策略的影响,电容电压波 动范围与子模块的平均开关频率呈现反比关系。降低电容电压波动范围需要较高的平均开 关频率,则会导致系统损耗增加、降低电容使用寿命以及增加系统的运行成本,而电容电压 波动范围较大会导致系统运行不稳定。 因此,针对具有阻尼电阻的MMC(以下简称MMC),如何优化控制各子模块的电容电 压波动范围和IGBT开关频率的大小,也是MMC研究中的重要问题。 现有控制方式为根据MMC桥臂电流方向以及需要导通的子模块个数,通过电容均 压环节控制流经子模块电容的桥臂电流以及子模块导通、关断的时间,进而对子模块的电 容电压波动范围和开关频率大小折中处理,达到稳定在规定值附近的目的。具体为:针对采 用最近电平逼近调制策略的MMC,其电容均压算法主要为基于排序的电容均压控制理论,如 加入保持因子排序的电容均压算法和增量式电容均压算法。增量式电容均压算法与之恰恰 相反,以很大的电容电压波动换取了相对低很多的开关频率。采用仅增大保持因子的方法 来降低开关频率,往往导致电容电压波动率不可控,且存在大量的无效子模块投切动作,增 加处理器计算量和子模块投切次数。加入保持因子排序的电容均压算法引入了保持因子和 电压阈值,通过调节参数可获得需求的开关频率或电压波动,但是理论上两者是不可调和, 使用该类算法无法对电容电压波动范围进行精确控制。 而且,在MMC的阀组件运行型式试验系统中,为了验证阀组件的极端耐受能力,迫 切需要定量控制阀组件子模块电容电压的波动范围,上述方法也无法满足该试验系统的需 要。 4 CN 111600495 A 说 明 书 2/6 页
技术实现要素:
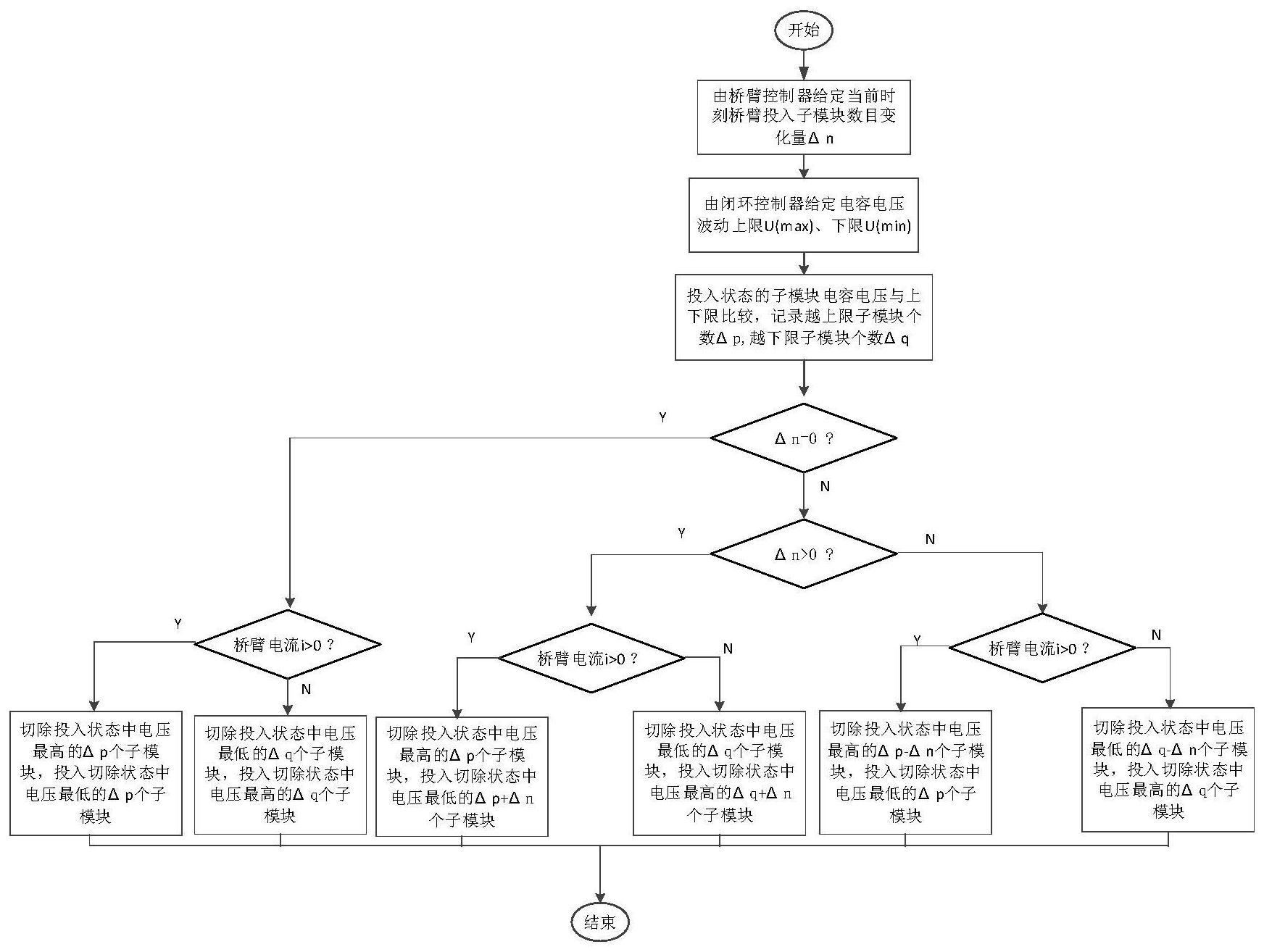
本发明的目的在于提供一种具有阻尼电阻的MMC的子模块控制方法及装置,用于 解决目前具有阻尼电阻的MMC的子模块在控制时存在的电容电压波动范围控制精度低的问 题。 为实现上述目的,本发明提出一种具有阻尼电阻的MMC的子模块控制方法,包括以 下步骤: 1)获取MMC电容电压波动极值和电容电压参考值,将电容电压波动极值和电容电 压参考值通过PI调节得到实际电容电压波动率,根据得到的实际电容电压波动率计算电容 电压波动阈值的上限、下限; 2)将投入状态的子模块电容电压与电容电压波动阈值的上限、下限比较,确定超 过上限和低于下限的子模块个数,根据桥臂电流的方向和当前时刻投入子模块变化量生成 桥臂子模块驱动脉冲,控制桥臂各子模块的投入和切除。 本方法通过将确定的电容电压参考值、计算出的电容电压波动极值结合电容电压 波动阈值的上限、下限进行闭环控制,使得电容电压的波动范围处于电容电压波动阈值的 上限和下限之间,实现了具有阻尼电阻的MMC的子模块电容电压波动范围的精准控制。本方 法可应用于具有阻尼电阻的MMC的阀组件的运行试验系统中,尤其是在直流电压等级高、子 模块数目多的电力系统中,能够有效降低开关频率,对电容电压的波动范围实现定量控制, 保证系统稳定运行。 进一步的,若当前时刻投入子模块变化量Δn等于0时,判断桥臂电流大小,当桥臂 电流大于零时,切除投入状态中电压最高的Δp个子模块,投入切除状态中电压最低的Δp 个子模块;当桥臂电流小于零时,切除投入状态中电压最低的Δq个子模块,投入切除状态 中电压最高的Δq个子模块;若当前时刻投入子模块变化量Δn大于0时,判断桥臂电流大 小,当桥臂电流大于零时,切除投入状态中电压最高的Δp个子模块,投入切除状态中电压 最低的Δp Δn个子模块;当桥臂电流小于零时,切除投入状态中电压最低的Δq个子模块, 投入切除状态中电压最高的Δq Δn个子模块;其中Δp为子模块电容电压超过电容电压波 动上限的子模块个数,Δq为子模块电容电压低于电容电压波动下限的子模块个数,Δn为 当前时刻桥臂投入子模块变化量。 当桥臂电流大于0时,通过投入电压低的子模块代替电压高的子模块,当桥臂电流 小于0时,通过投入电压高的子模块代替电压低的子模块,保证换流器电压波动范围小,进 一步的保证系统稳定运行。 进一步的,若当前时刻投入子模块变化量Δn小于0时,判断桥臂电流大小,当桥臂 电流大于零时,切除投入状态中电压最高的Δp-Δn个子模块,投入切除状态中电压最低的 Δp个子模块;当桥臂电流小于零时,切除投入状态中电压最低的Δq-Δn个子模块,投入切 除状态中电压最高的Δq个子模块;其中Δp为子模块电容电压超过电容电压波动上限的子 模块个数,Δq为子模块电容电压低于电容电压波动下限的子模块个数,Δn为当前时刻桥 臂投入子模块变化量。 当桥臂电流大于0时,通过投入电压低的子模块代替电压高的子模块,当桥臂电流 小于0时,通过投入电压高的子模块代替电压低的子模块,保证换流器电压波动范围小,进 一步的保证系统稳定运行。 5 CN 111600495 A 说 明 书 3/6 页 进一步的,步骤1)中的MMC电容电压波动极值是根据电容电压平均值和所有桥臂 子模块电容电压最大值计算得到。 该计算方法准确的得出MMC电容电压波动极值,进一步的实现电容电压波动范围 的精准控制。 进一步的,电容电压参考值包括给定的稳态参考值和暂态参考值,需要根据MMC所 处状态选择。 电力系统的运行状态分为稳态和暂态,通过系统稳定运行工况综合确定电容电压 波动范围,进而更加精准的确定适合系统稳定运行的波动范围。 进一步的,电容电压波动阈值的上限、下限分别为: U(max)=Uc_avg(1 Δf) U(min)=Uc_avg(1-Δf), 其中,U(max)为电容电压波动阈值的上限,U(min)为电容电压波动阈值的下限, Uc_avg为当前时刻的电容电压平均值,Δf为经PI控制器计算得到的实际电容电压波动率。 通过上述公式可以准确的得出电容电压波动阈值的上限和下限,使得具有阻尼电 阻的MMC的子模块的电容电压的波动范围实现定量控制,保证系统的稳定运行。 另外,还提出一种具有阻尼电阻的MMC的子模块控制装置,包括控制器,控制器包 括存储器和处理器,处理器用于执行存储在存储器中的指令以实现如下方法: 1)获取MMC电容电压波动极值和电容电压参考值,将电容电压波动极值和电容电 压参考值通过PI调节得到实际电容电压波动率,根据得到的实际电容电压波动率计算电容 电压波动阈值的上限、下限; 2)将投入状态的子模块电容电压与电容电压波动阈值的上限、下限比较,确定超 过上限和低于下限的子模块个数,根据桥臂电流的方向和当前时刻投入子模块变化量生成 桥臂子模块驱动脉冲,控制桥臂各子模块的投入和切除。 本装置通过将确定的电容电压参考值、计算出的电容电压波动极值结合电容电压 波动阈值的上限、下限进行闭环控制,使得电容电压的波动范围处于电容电压波动阈值的 上限和下限之间,实现了具有阻尼电阻的MMC的子模块电容电压波动范围的精准控制。本装 置可应用于具有阻尼电阻的MMC的阀组件的运行试验系统中,尤其是在直流电压等级高、子 模块数目多的电力系统中,能够有效降低开关频率,对电容电压的波动范围实现定量控制, 保证系统稳定运行。 进一步的,若当前时刻投入子模块变化量Δn等于0时,判断桥臂电流大小,当桥臂 电流大于零时,切除投入状态中电压最高的Δp个子模块,投入切除状态中电压最低的Δp 个子模块;当桥臂电流小于零时,切除投入状态中电压最低的Δq个子模块,投入切除状态 中电压最高的Δq个子模块;若当前时刻投入子模块变化量Δn大于0时,判断桥臂电流大 小,当桥臂电流大于零时,切除投入状态中电压最高的Δp个子模块,投入切除状态中电压 最低的Δp Δn个子模块;当桥臂电流小于零时,切除投入状态中电压最低的Δq个子模块, 投入切除状态中电压最高的Δq Δn个子模块;其中Δp为子模块电容电压超过电容电压波 动上限的子模块个数,Δq为子模块电容电压低于电容电压波动下限的子模块个数,Δn为 当前时刻桥臂投入子模块变化量。 当桥臂电流大于0时,通过投入电压低的子模块代替电压高的子模块,当桥臂电流 6 CN 111600495 A 说 明 书 4/6 页 小于0时,通过投入电压高的子模块代替电压低的子模块,保证换流器电压波动范围小,进 一步的保证系统稳定运行。 进一步的,若当前时刻投入子模块变化量Δn小于0时,判断桥臂电流大小,当桥臂 电流大于零时,切除投入状态中电压最高的Δp-Δn个子模块,投入切除状态中电压最低的 Δp个子模块;当桥臂电流小于零时,切除投入状态中电压最低的Δq-Δn个子模块,投入切 除状态中电压最高的Δq个子模块;其中Δp为子模块电容电压超过电容电压波动上限的子 模块个数,Δq为子模块电容电压低于电容电压波动下限的子模块个数,Δn为当前时刻桥 臂投入子模块变化量。 当桥臂电流大于0时,通过投入电压低的子模块代替电压高的子模块,当桥臂电流 小于0时,通过投入电压高的子模块代替电压低的子模块,保证换流器电压波动范围小,进 一步的保证系统稳定运行。 进一步的,步骤1)中的MMC电容电压波动极值是根据电容电压平均值和所有桥臂 子模块电容电压最大值计算得到。 该计算方法准确的得出MMC电容电压波动极值,进一步的实现电容电压波动范围 的精准控制。 附图说明 图1为本发明提供的具有阻尼电阻的MMC的拓扑结构示意图; 图2为本发明提供的具有阻尼电阻的MMC阀组件典型的运行试验的结构图; 图3为本发明提供的具有阻尼电阻的MMC阀组件典型的运行试验的原理图; 图4为本发明中具有阻尼电阻的MMC的子模块电容电压波动范围精确控制的原理 框图; 图5为本发明具有阻尼电阻的MMC的电容电压参考值的计算流程图; 图6是本发明具有阻尼电阻的MMC的电容电压波动极值的计算流程图; 图7是本发明控制桥臂各子模块的投入和切除的控制流程图; 图8是本发明具有阻尼电阻的MMC的子模块控制方法控制得到的MMC桥臂电容电压 标幺值及实测电容电压波动上下限波形图。











