
技术摘要:
本申请涉及一种地板切割设备、地板备料系统、多机协作地板铺装系统。地板切割设备包括底架、原料储存仓、切割平台、切割装置、以及搬运装置,原料储存仓设置于底架上,用于储存未切割地板;切割平台设置于底架上,用于放置待切割地板;切割装置设置于底架上,用于切割 全部
背景技术:
现有设备对木地板铺装时,需要操作者进行适合长度的切割,并且切割量的占比 大,通过人工切割方式,存在安全风险,并且在切割时的粉尘对操作者也产生一定危害。
技术实现要素:
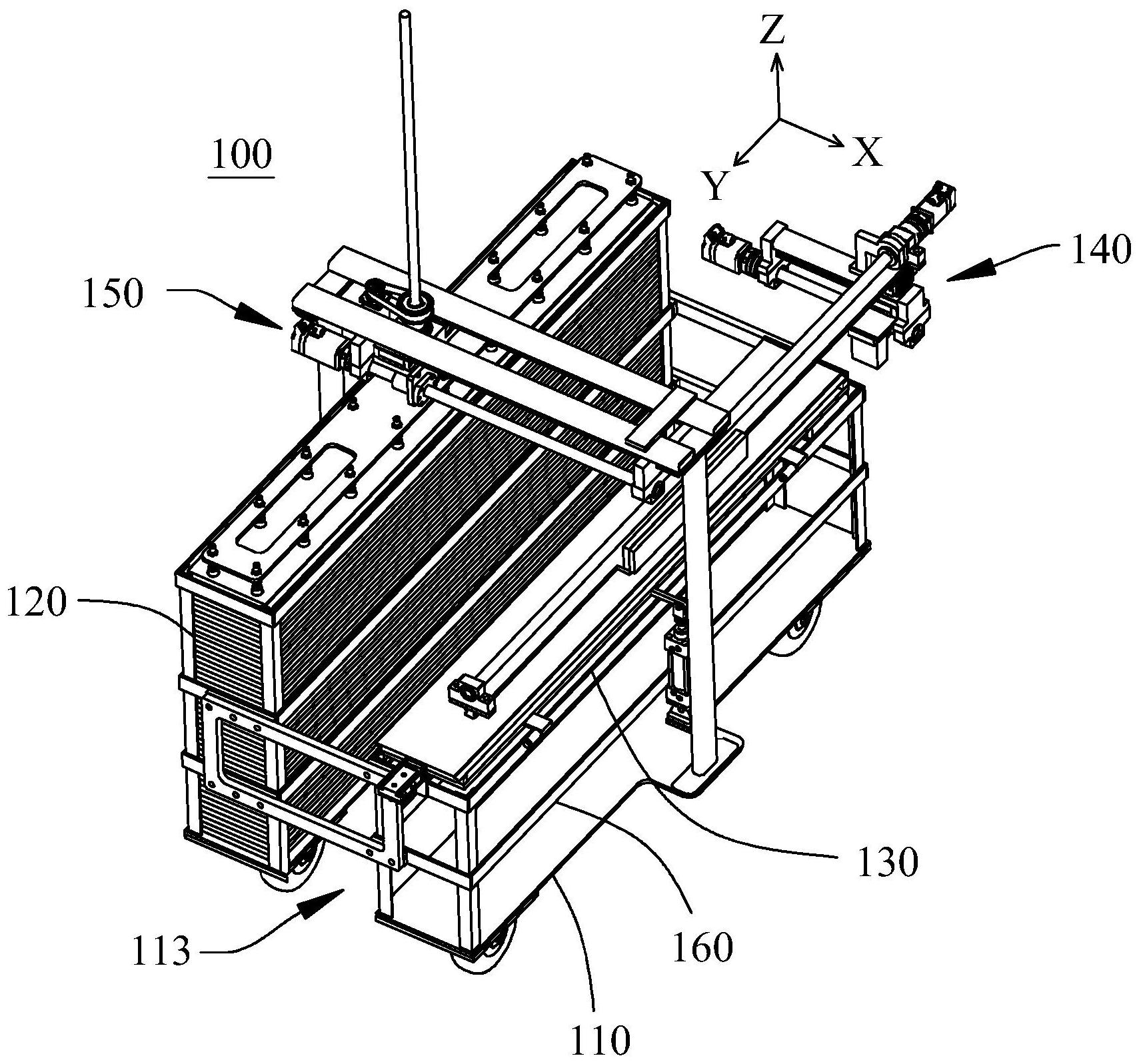
本申请的目的在于提供一种地板切割设备,能够实现地板的自动切割,节省人力, 同时,避免粉尘对工人产生危害。 本申请的另一个目的在于提供一种地板备料系统,能够实现地板的备料,以便于 持续作业,提高了工作效率。 本申请的再一个目的在于提供一种多机协作地板铺装系统,自动化程度高,工作 效率高,用工成本低。 本申请提供一种地板切割设备,包括: 底架; 原料储存仓,原料储存仓设置于底架上,用于储存未切割地板; 切割平台,切割平台设置于底架上,用于放置待切割地板; 切割装置,切割装置设置于底架上,用于切割放置于切割平台上的待切割地板;以 及 搬运装置,搬运装置设置于底架上,用于转移地板。 该地板切割设备,通过切割装置实现地板的切割,以用于不同尺寸的地板的需求, 无需人工切割,节省了人力,也避免了粉尘对工人产生危害;通过搬运装置实现地板的转 移,提高了工作效率。 可选地,地板切割设备还包括缓存料仓,缓存料仓设置于底架上,用于储存切割后 剩余料。 在上述实施方式中,缓存料仓能够储存剩余料,以便二次利用。 可选地,切割平台位于缓存料仓的上方且覆盖缓存料仓的进料口,地板切割设备 配置有切割平台驱动机构,切割平台驱动机构用于驱动切割平台打开或关闭缓存料仓的进 料口。 在上述实施方式中,切割平台覆盖缓存料仓的进料口,节省安装空间;通过切割平 台驱动机构能够实现切割平台打开或关闭缓存料仓的进料口,操作灵活。 可选地,地板切割设备设置有供送料设备进入的对接区域,对接区域位于原料储 存仓和缓存料仓之间。 在上述实施方式中,对接区域的设置,合理利用结构空间,使得地板切割设备结构 4 CN 111546429 A 说 明 书 2/10 页 紧凑,便于送料设备与地板切割设备的对接。 可选地,地板切割设备还包括对中机构,对中机构用于将进入对接区域内的送料 设备对中。 在上述实施方式中,通过对中机构实现送料设备在对接区域内的对中,保证送料 设备与地板切割设备对接精准。 本申请还提供一种地板备料系统,包括上述的地板切割设备,以及送料设备,送料 设备用于与地板切割设备对接,送料设备包括底盘和输送料仓,输送料仓设置于底盘上,搬 运装置能够将地板从地板切割设备转移至输送料仓内。 该地板备料系统,底盘能够带动送料设备整体移动,使得送料设备移动灵活;输送 料仓能够储存一定量的地板,便于地板的转运;通过送料设备与地板切割设备的对接,提高 了地板备料效率。 可选地,地板切割设备设置有第一相机和第一测距传感器,第一相机用于采集送 料设备的图像,第一测距传感器用于检测送料设备与地板切割设备的距离,送料设备能够 响应于第一相机采集的图像信息和第一测距传感器检测的距离信息,以调整与地板切割设 备的角度和距离。 在上述实施方式中,通过第一相机采集送料设备的图像,送料设备能够计算出送 料设备与地板切割设备的角度,以调整偏移角度;通过第一测距传感器检测送料设备与地 板切割设备的距离,送料设备能够计算出送料设备与地板切割设备的距离,以调整移动距 离。 可选地,送料设备设置有转动驱动机构,输送料仓可转动地连接于底盘,转动驱动 机构用于驱动输送料仓相对于底盘转动,以改变输送料仓在水平面上的投影面积。 在上述实施方式中,转动驱动机构能够驱动输送料仓相对于底盘转动,使得输送 料仓在水平面上的投影面积改变,从而减少送料设备占用的空间,以适用于行驶于狭窄的 环境。 本申请还提供一种多机协作地板铺装系统,包括: 上述的地板备料系统; 地板铺装设备,地板铺装设备包括基架、抓取组件及机械臂,机械臂设置于基架 上,抓取组件安装于机械臂的末端; 送料设备用于将地板移送至地板铺装设备附近,抓取组件用于抓取送料设备上的 地板并将地板铺装于地面上。 该多机协作地板铺装系统,通过送料设备在地板切割设备和地板铺装设备之间行 走对接,实现地板的转移,提高了工作效率;地板铺装设备无需携带料仓,提高了铺装灵活 性。 可选地,抓取组件设置有第二相机和第二测距传感器,第二相机用于采集送料设 备的图像,第二测距传感器用于检测抓取组件与送料设备在竖直方向上的距离,机械臂用 于响应于第二相机采集的图像信息和第二测距传感器检测的距离信息,以调整抓取组件相 对于送料设备的角度和高度。 在上述实施方式中,机械臂能够响应于第二相机采集的图像信息和第二测距传感 器检测的距离信息,以调整抓取组件相对于送料设备的角度和高度,提高了送料设备与地 5 CN 111546429 A 说 明 书 3/10 页 板铺装设备的对接精度,便于抓取组件抓料精准。 本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变 得明显,或通过本申请的实践了解到。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对实施例中所需要使用的附 图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看作是对 范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这 些附图获得其他相关的附图。 图1为本申请第一方面实施例提供的地板切割设备的轴测图; 图2为本申请第一方面实施例提供的地板切割设备的主视图; 图3为本申请第一方面实施例提供的地板切割设备的俯视图; 图4为本申请第二方面实施例提供的地板备料系统的结构示意图; 图5为本申请第二方面实施例提供的地板备料系统的送料设备的结构示意图; 图6为本申请第三方面实施例提供的多机协作地板铺装系统的结构示意图; 图7为本申请第三方面实施例提供的多机协作地板铺装系统的地板铺装设备的结 构示意图; 图8为本申请第三方面实施例提供的多机协作地板铺装系统的地板铺装设备的抓 取组件的结构示意图。 图标:100-地板切割设备;110-底架;111-行走机构;112-缺口;113-对接区域; 114-连接架;115-第一相机;116-第一测距传感器;120-原料储存仓;130-切割平台;131-第 一连杆组;140-切割装置;141-切割组件;142-第一切割丝杠驱动机构;143-第二切割丝杠 驱动机构;150-搬运装置;151-搬运吸盘;152-第一丝杠驱动机构;153-第二丝杠驱动机构; 160-缓存料仓;170-切割平台驱动机构;180-对中机构;190-机架;191-横梁;192-立杆; 200-地板备料系统;300-送料设备;310-底盘;311-导向立柱;320-输送料仓;321-导向滑 块;330-顶升机构;341-第二连杆组;342-第一转动驱动气缸;343-第二转动驱动气缸;400- 多机协作地板铺装系统;500-地板铺装设备;510-基架;511-架体;512-行走驱动机构;520- 抓取组件;521-安装座;522-过渡座;523-定位座;524-旋转轴承;525-复位弹簧;526-左右 调整弹簧;527-抓取吸盘;530-机械臂;540-第二相机;550-第二测距传感器;600-地板。











