
技术摘要:
本发明涉及一种基于三轴加速度传感器的UWB定位系统,包括定位标签和至少两个基站,所述定位标签包括相互连接的低电压检测芯片(1)和发声器(2);所述定位标签和所述基站均具有相同的控制单元,所述控制单元包括MCU、电池模块、UWB传感器和USB通信接口,所述MCU分别与所述 全部
背景技术:
超宽带(Ultra Wide Band,UWB)技术是一种无线载波通信技术,它不采用正弦载 波,而是利用纳秒级的非正弦波窄脉冲传输数据,因此其所占的频谱范围很宽。UWB技术是 一种使用1GHz以上频率带宽的无线载波通信技术。它不采用正弦载波,而是利用纳秒级的 非正弦波窄脉冲传输数据,因此其所占的频谱范围很大,尽管使用无线通信,但其数据传输 速率可以达到几百兆比特每秒以上。使用UWB技术可在非常宽的带宽上传输信号,美国联邦 通信委员会(FCC)对UWB技术的规定为:在3.1~10.6GHz频段中占用500MHz以上的带宽。UWB 技术始于20世纪60年代兴起的脉冲通信技术。UWB技术利用频谱极宽的超宽基带脉冲进行 通信,故又称为基带通信技术、无线载波通信技术,主要用于军用雷达、定位和低截获率/低 侦测率的通信系统中。 UWB实质上是以占空比很低的冲击脉冲作为信息载体的无载波扩谱技术,它是通 过对具有很陡上升和下降时间的冲击脉冲进行直接调制。典型的UWB直接发射冲击脉冲串, 不再具有传统的中频和射频的概念,此时发射的信号既可看成基带信号(依常规无线电而 言),也可看成射频信号(从发射信号的频谱分量考虑)。 UWB(超宽带无线技术)是当前国内外定位领域研究热点之一。在室内定位过程中, UWB具有厘米级的定位精度、良好的抗多路径性能、较低的发射功率及一定的穿透能力,与 WiFi、ZigBee、RFID等室内定位技术相比优势显著。 目前UWB超带宽技术在室内定位有着广泛的应用,但是单依靠该技术在复杂的室 内环境,如建筑物、人体遮挡等因素会影响测距及定位的精度。UWB定位系统因为易受遮挡、 多径干扰等影响,定位会出现野值,而通过直接对UWB定位数据进行滤波会导致定位系统的 延迟增大,一些标称精度为10cm的定位系统往往在实际工作中达不到理想效果,无法直接 应用于对定位可靠性、精度、实时性要求高的多机器人定位场合。
技术实现要素:
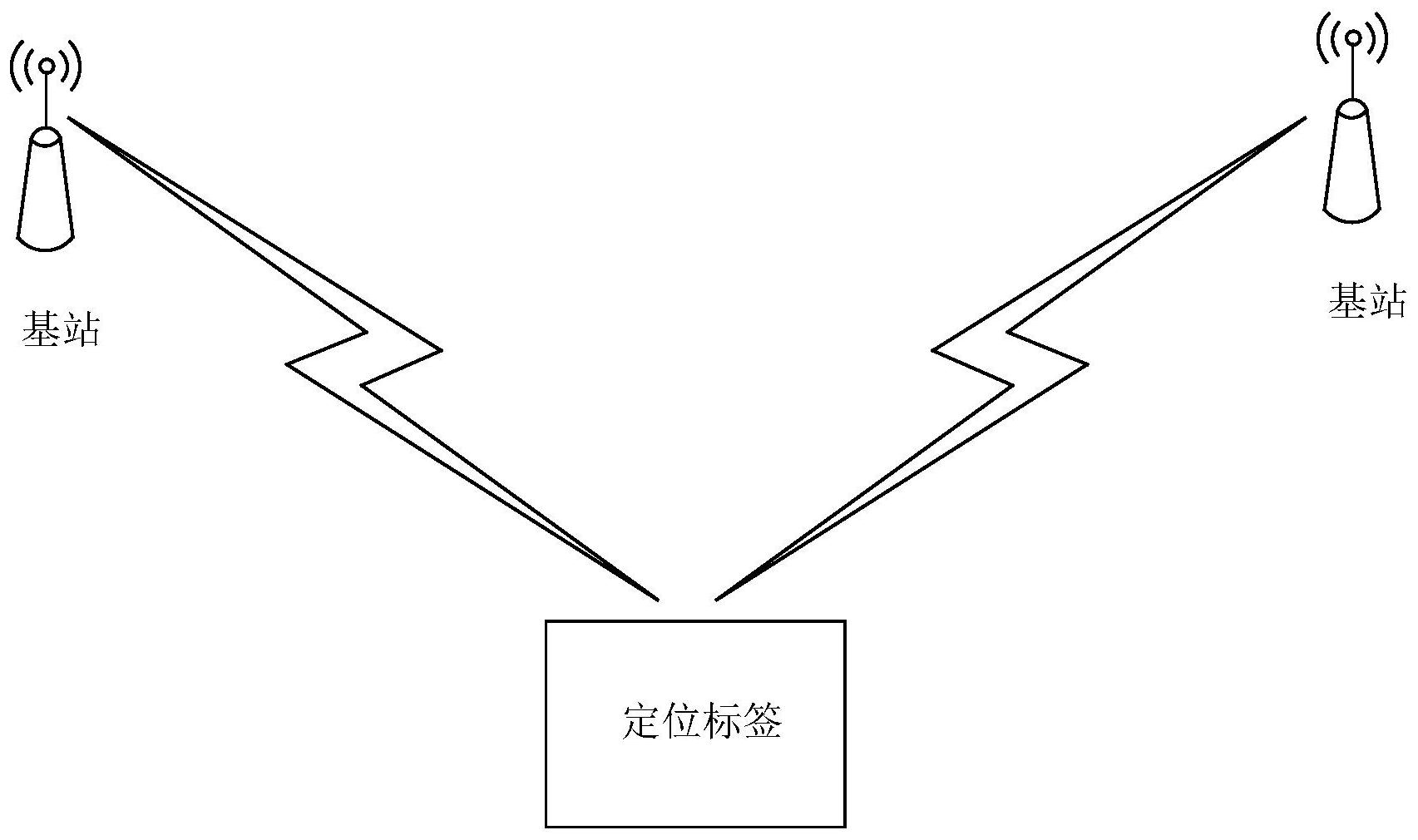
为了克服现有技术中的缺点,本发明的目的在于提供一种基于三轴加速度传感器 的UWB定位系统,利用三轴加速度传感器的数据,进而削减因为人体遮挡对UWB测距的影响, 提高测距精度。 本发明提供一种基于三轴加速度传感器的UWB定位系统,包括定位标签和至少两 个基站,所述定位标签包括相互连接的低电压检测芯片和发声器;所述定位标签和所述基 站均具有相同的控制单元,所述控制单元包括MCU、电池模块、UWB传感器和USB通信接口,所 述MCU分别与所述电池模块、所述UWB传感器以及所述USB通信接口连接;所述定位标签的控 制单元还包括与所述MCU连接的三轴加速度传感器。 3 CN 111580046 A 说 明 书 2/3 页 优选地,所述电池模块由锂电池装置、3.7V转3.3V降压电路和3.3V转1.8V降压电 路构成,其中3.7V转3.3V降压电路采用芯片ME6206-3 .3 ,3 .3V转1.8V降压电路采用芯片 LXDC2HL。 与现有技术相比,本发明提供的技术方案具有以下优势: 本发明的UWB定位系统在某些人员定位的应用环境中,通过设置定位标签和至少 两个定位基站,其中定位标签可由需要定位的工作人员穿戴在身上。利用UWB定位系统实现 处定位,本发明还通过设置三轴加速度传感器连接于定位标签中的MCU,其中三轴加速度传 感器用于对工作人员进行形态及运动姿态判断,通过算法减少定位信息传输,节省信道消 耗;采集三轴加速度传感器的数据,进而削减因为人体遮挡对UWB测距的影响,提高测距精 度。 附图说明 图1为本发明UWB定位系统的结构示意图; 图2为基站的硬件结构示意图; 图3为定位标签的硬件结构示意图; 图4为图1中定位标签的结构示意图; 图5为3.7V转3.3V降压电路采用芯片ME6206-3.3的电路连接图; 图6为3.3V转1.8V降压电路采用芯片LXDC2HL的电路连接图。 附图标号:1-低电压检测芯片,2-发声器。











