
技术摘要:
本发明提供了一种四足仿生机器人单腿机构,包括驱动模块、髋关节单元、液压缸、大腿单元、膝关节、小腿单元;所述驱动模块、髋关节单元、大腿单元、膝关节、小腿单元依次可转动连接,驱动模块和大腿单元直接连接有液压缸。本发明液压缸带动膝关节处的多连杆机构,从而 全部
背景技术:
由于四足动物经过漫长的进化,对地形的适应能力较强,在复杂地形环境下能过 沟越壑、大步幅高速行走以及攀爬大角度陡坡,其结构和运动方式为四足仿生机器人的研 究提供了很好的借鉴。增大步行机器人的负载量,降低质量,提高步行机器人行走时的稳定 能力和应急反应能力,提升运动速度,增强其对地面环境的适应能力,降低步行过程中的能 量消耗等,日益成为各国机器人学界研究的热点。 目前国内外已经研发出不同构型的四足步行机器人样机。常用的驱动方式有液压 驱动、气动驱动、电机驱动等。传统的依赖液压系统设计的仿生关节具有输出力矩大,抗负 载能力强的特点,但是存在液压系统复杂,设计的关节摆动范围小等特点呢,难以适应大坡 度条件下行走大摆动关节范围的需要。
技术实现要素:
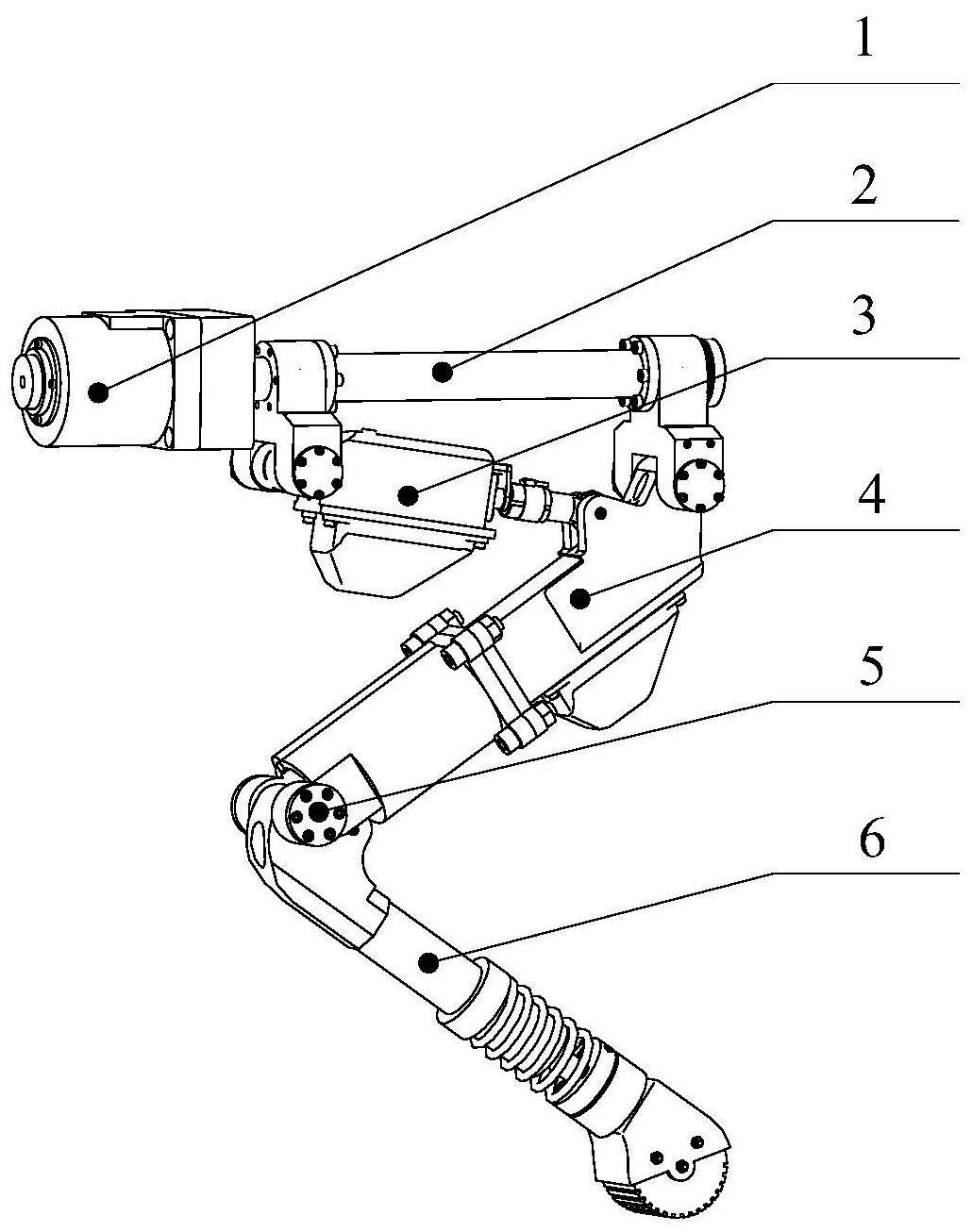
为解决上述技术问题,本发明提供了一种四足仿生机器人单腿机构,该四足仿生 机器人单腿机构结构紧凑,能在有限的安装空间内实现大幅度运动角度。 本发明通过以下技术方案得以实现。 本发明提供的一种四足仿生机器人单腿机构,包括驱动模块、髋关节单元、液压 缸、大腿单元、膝关节、小腿单元;所述驱动模块、髋关节单元、大腿单元、膝关节、小腿单元 依次可转动连接,驱动模块和大腿单元直接连接有液压缸;大腿单元和膝关节构成转动副, 膝关节和小腿单元构成转动副;液压缸驱动大腿单元绕髋关节单元和大腿单元的连接点转 动;驱动模块驱动髋关节单元旋转。 所述驱动模块包括液压马达、液压马达安装支座、安装螺栓、液压马达联轴块、平 键,液压马达通过安装螺栓固定在液压马达安装支座上,液压马达安装支座通过平键联接 于髋关节单元,安装在液压马达联轴块的键槽中,液压马达通过液压马达安装支座、平键带 动髋关节单元旋转。 所述髋关节单元包括横摆轴、连接块Ⅰ、连接块Ⅱ、髋关节轴Ⅰ、髋关节轴Ⅱ,横摆轴 前端转动限位于驱动模块,横摆轴紧固于连接块Ⅰ和连接块Ⅱ,髋关节轴Ⅰ固定在连接块Ⅰ下 端位置,髋关节轴Ⅱ固定在连接块Ⅱ下端位置,液压缸可转动安装在髋关节轴Ⅰ上,大腿单 元可转动安装在髋关节轴Ⅱ上。 所述髋关节轴Ⅰ和髋关节轴Ⅱ通过滚针推力轴承和深沟球轴承分别安装液压缸和 大腿单元,在滚针推力轴承和深沟球轴承之间有无油衬套套在髋关节轴Ⅰ和髋关节轴Ⅱ上, 髋关节轴Ⅰ和髋关节轴Ⅱ上安装液压缸和大腿单元的位置两侧还套装有轴向挡圈和O型密 封圈;所述连接块Ⅰ和连接块Ⅱ均通过六角头螺栓安装紧固;在髋关节轴Ⅰ和髋关节轴Ⅱ的 两端装有端盖。 4 CN 111591371 A 说 明 书 2/5 页 所述大腿单元包括销轴Ⅰ、一体化液压缸、销轴Ⅱ、连接杆、小腿转动轴,销轴Ⅰ上安 装液压缸,销轴Ⅰ固定于一体化液压缸,一体化液压缸一端固定于髋关节单元,另一端动作 端固定有销轴Ⅱ,连接杆一端安装在销轴Ⅱ上、另一端安装于小腿转动轴,小腿转动轴可转 动固定于小腿单元;销轴Ⅱ固定在直线轴承定位套筒上,直线轴承定位套筒固定在壳体端 部,壳体通过螺栓Ⅰ固定于一体化液压缸,壳体下端、小腿转动轴和膝关节构成多连杆机构。 所述销轴Ⅰ通过关节轴承Ⅰ安装液压缸;销轴Ⅱ通过关节轴承Ⅱ安装连接杆;小腿 转动轴通过关节轴承Ⅲ安装。 所述小腿单元包括小腿外筒、小腿、脚踝、足端,小腿外筒、小腿、脚踝、足端依次连 接安装,在脚踝和小腿外筒之间有六维力传感器固定于脚踝,在小腿外筒和六维力传感器 之间有圆柱螺旋压缩弹簧套装在小腿外筒上,小腿固定于六维力传感器;小腿外筒上端套 装在膝关节上。 所述膝关节包括膝关节转动轴、膝关节轴卡片,膝关节转动轴两端有膝关节转动 轴端盖,膝关节转动轴端盖通过螺栓Ⅱ固定于大腿单元的壳体,膝关节转动轴通过膝关节 滚针轴承安装于小腿单元;膝关节轴卡片设置于膝关节转动轴上靠端部内侧的位置,用于 限位。 本发明的有益效果在于:液压缸带动膝关节处的多连杆机构,从而实现小腿单元 的大角度摆动;在大腿单元增加一个直线轴承定位套筒,能防止一体化液压缸的活塞受到 非轴向力,对其起到直线运动定位的作用,提高一体化液压缸寿命;小腿单元设置有弹簧作 为降低能耗和缓冲减震结构,既能降低运动时能量消耗,又可减少对腿部的震动冲击;采用 液压马达驱动关节运动,结构简单、控制方便。 附图说明 图1是本发明的结构示意图; 图2是图1中驱动模块剖视图; 图3是图1中髋关节单元的结构示意图; 图4是图2中A-A面剖视图; 图5是图2中B-B面剖视图; 图6是图1中液压缸与大腿单元、膝关节与大腿单元、小腿单元之间连接结构的示 意图; 图7是图1中膝关节的结构示意图; 图8是图1中小腿单元的剖视结构示意图。 图中:1-驱动模块,2-髋关节单元,3-液压缸,4-大腿单元,5-膝关节,6-小腿单元, 7-液压马达,8-液压马达安装支座,9-安装螺栓,10-液压马达联轴块,11-平键,12-横摆轴, 13-连接块Ⅰ,14-六角头螺栓,15-连接块Ⅱ,16-端盖,17-滚针推力轴承,18-无油衬套,19- 深沟球轴承,20-髋关节轴Ⅰ,21-轴向挡圈,22-O型密封圈,23-髋关节轴Ⅱ,24-关节轴承Ⅰ, 25-销轴Ⅰ,26-一体化液压缸,27-螺栓Ⅰ,28-壳体,29-直线轴承定位套筒,30-关节轴承Ⅱ, 31-销轴Ⅱ,32-连接杆,33-关节轴承Ⅲ,34-小腿转动轴,35-膝关节转动轴,36-膝关节轴卡 片,37-膝关节滚针轴承,38-膝关节转动轴端盖,39-螺栓Ⅱ,40-螺栓Ⅳ,41-小腿外筒,42- 小腿,43-小腿螺母,44-圆柱螺旋压缩弹簧,45-六维力传感器,46-螺栓Ⅲ,47-脚踝,48-足 5 CN 111591371 A 说 明 书 3/5 页 端。











