
技术摘要:
本发明公开了一种彩色点云生成方法、装置及终端设备,该方法包括:获取位置数据、影像数据及位置姿态数据,其中,位置姿态数据包括地理位置信息及旋转角度信息;根据地理位置信息计算因经线偏差导致的第一旋转矩阵;根据第一旋转矩阵、影像数据、地理位置信息及旋转角 全部
背景技术:
点云已经被广泛用于测绘、林业、地质、建筑以及数字城市等各个领域。利用激光 雷达获取的高精度位置信息可以对地物进行量测与分析。然而,单纯的激光点云仅包含位 置信息而没有包含地物光谱信息。采用激光雷达结合影像信息能够得到彩色点云,不论是 从直观性还是后续分析,彩色点云都能带来极大的优势。 现有技术中,往往直接利用标定的激光点云数据与高精影像的投影矩阵(即投影 关系)进行配准与融合处理,然而该种方案中,由于激光点云采集设备和相机的抖动等因素 使得标定结果不准,从而配准过程会出现较大误差,导致融合结果不佳。 还有一些基于特征、区域匹配的点云匹配方案对数据较为敏感,在某些特定场景 有效,适应性不强。
技术实现要素:
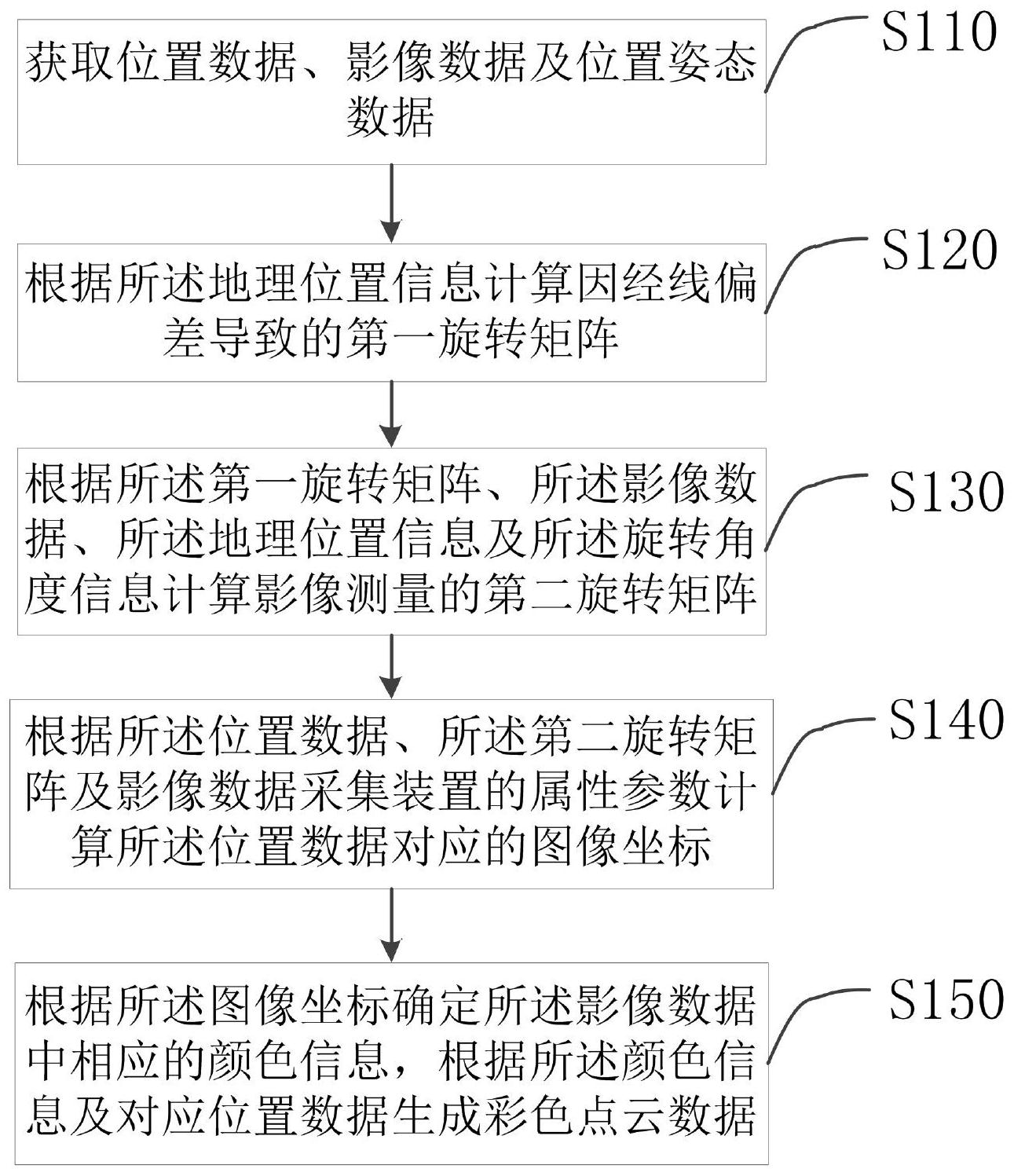
鉴于上述问题,本发明实施例的目的在于提供一种彩色点云生成方法、装置及终 端设备,以解决现有技术的不足。 根据本发明的一个实施方式,提供一种彩色点云生成方法,包括: 获取位置数据、影像数据及位置姿态数据,其中,所述位置姿态数据包括地理位置 信息及旋转角度信息; 根据所述地理位置信息计算因经线偏差导致的第一旋转矩阵; 根据所述第一旋转矩阵、所述影像数据、所述地理位置信息及所述旋转角度信息 计算影像测量的第二旋转矩阵; 根据所述位置数据、所述第二旋转矩阵及影像数据采集装置的属性参数计算所述 位置数据对应的图像坐标; 根据所述图像坐标确定所述影像数据中相应的颜色信息,根据所述颜色信息及对 应位置数据生成彩色点云数据。 在上述的彩色点云生成方法中,所述根据所述地理位置信息计算因经线偏差导致 的第一旋转矩阵包括: 根据所述地理位置信息计算投影点的子午线收敛角; 根据所述子午线收敛角确定所述第一旋转矩阵。 在上述的彩色点云生成方法中,所述根据所述第一旋转矩阵、所述影像数据、所述 地理位置信息及所述旋转角度信息计算影像测量的第二旋转矩阵包括: 在标定过程中,根据所述影像数据中各影像之间的相对位置关系初步确定影像测 量的第二旋转矩阵; 4 CN 111598930 A 说 明 书 2/11 页 根据所述第二旋转矩阵、所述第一旋转矩阵、所述地理位置信息及所述旋转角度 信息估算影像数据采集装置标定后的旋转参数; 在标定完成后,通过所述旋转参数重新计算第二旋转矩阵。 在上述的彩色点云生成方法中,所述根据所述影像数据中各影像之间的相对位置 关系初步确定影像测量的第二旋转矩阵包括: 读取影像的基本信息; 在所述基本信息中提取出特征点; 将每一影像中的特征点与其余所有影像中的特征点进行匹配,根据匹配点建立该 影像与所述其余所有影像之间的匹配关系,根据所述匹配关系计算所述第二旋转矩阵。 在上述的彩色点云生成方法中,所述根据所述第二旋转矩阵、所述第一旋转矩阵、 所述地理位置信息及所述旋转角度信息估算影像数据采集装置标定后的旋转参数包括: 根据所述旋转角度信息计算影像数据采集装置到IMU之间的第三旋转矩阵; 根据所述地理位置信息计算地心到影像数据采集装置的第四旋转矩阵; 根据所述第一旋转矩阵、所述第二旋转矩阵、所述第三旋转矩阵及所述第四旋转 矩阵估算所述旋转参数。 在上述的彩色点云生成方法中,所述属性参数包括影像数据采集装置的中心点坐 标及焦距; 所述根据所述位置数据、所述第二旋转矩阵及影像数据采集装置的属性参数计算 与所述位置数据对应的图像坐标包括: 根据所述位置数据、所述第二旋转矩阵中的各参数及所述中心点坐标计算第一转 接参数; 根据所述第一转接参数及所述焦距计算该位置数据对应的图像坐标。 在上述的彩色点云生成方法中,针对位置数据与图像坐标匹配不准确的情况,该 方法还包括: 根据已经准确匹配的位置数据与所述图像坐标对所述第二旋转矩阵进行修正; 根据修正后的所述第二旋转矩阵重新计算匹配不准确的位置数据对应的图像坐 标。 根据本发明的另一个实施方式,提供一种彩色点云生成装置,该装置包括: 获取模块,用于获取位置数据、影像数据及位置姿态数据,其中,所述位置姿态数 据包括地理位置信息及旋转角度信息; 第一计算模块,用于根据所述地理位置信息计算因经线偏差导致的第一旋转矩 阵; 第二计算模块,用于根据所述第一旋转矩阵、所述影像数据、所述地理位置信息及 所述旋转角度信息计算影像测量的第二旋转矩阵; 第三计算模块,用于根据所述位置数据、所述第二旋转矩阵及影像数据采集装置 的属性参数计算所述位置数据对应的图像坐标; 生成模块,用于根据所述图像坐标确定所述影像数据中相应的颜色信息,根据所 述颜色信息及对应位置数据生成彩色点云数据。 根据本发明的再一个实施方式,提供一种终端设备,所述终端设备包括存储器以 5 CN 111598930 A 说 明 书 3/11 页 及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述终 端设备执行上述的彩色点云生成方法。 根据本发明的又一个实施方式,提供一种计算机可读存储介质,其存储有所述终 端设备中所用的所述计算机程序。 本公开的实施例提供的技术方案可以包括如下有益效果: 本发明中一种彩色点云生成方法、装置及终端设备,根据采集的所述地理位置信 息计算因经线偏差导致的第一旋转矩阵,并根据所述第一旋转矩阵、所述影像数据、所述地 理位置信息及所述旋转角度信息计算影像测量的第二旋转矩阵,该第二旋转矩阵即因相机 安置偏差导致的错位和偏移的旋转矩阵,根据所述位置数据、所述第二旋转矩阵及影像数 据采集装置的属性参数计算所述位置数据对应的图像坐标,最终根据所述图像坐标确定所 述影像数据中相应的颜色信息,根据所述颜色信息及对应位置数据生成彩色点云数据。该 技术方案解决了传统方法生成彩色点云操作复杂的问题,自动化程度高,操作简便,能明显 提高效率;计算得到彩色点云整体效果好,精度高,减少了因安置偏差导致的错位和偏移; 具有良好的适应性,可以用于多种场景,对场景以及点云密度不敏感,生成的彩色点云整体 效果较好。 为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合 所附附图,作详细说明如下。 附图说明 为了更清楚地说明本发明的技术方案,下面将对实施例中所需要使用的附图作简 单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对本发明 保护范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根 据这些附图获得其他相关的附图。 图1示出了本发明第一实施例提供的一种彩色点云生成方法的流程示意图; 图2示出了本发明第二实施例提供的一种彩色点云生成方法的流程示意图; 图3示出了本发明第三实施例提供的一种彩色点云生成方法的流程示意图; 图4示出了本发明第四实施例提供的一种彩色点云生成方法的流程示意图; 图5示出了本发明第五实施例提供的一种彩色点云生成装置的结构示意图。 标号:500-彩色点云生成装置;510-获取模块;520-第一计算模块;530-第二计算 模块;540-第三计算模块;550-生成模块。











