
技术摘要:
本发明公开了一种用于梧桐树幼株的移动挪栽设备,包括水平设置的托载板、内托盘和抓取机构,所述托载板中部设置有圆柱形结构的焊盘,且托载板两侧均并排设置若干个扣筒,所述托载板底部四角均设置有传动底座,且焊盘中部上方设置有电机一,且焊盘上方通过竖向设置的支 全部
背景技术:
在人们向城市道路两旁栽植梧桐树幼株的过程中,挪栽设备被使用越来越多,通 过将梧桐树幼株放到挪栽设备上,人们推动挪栽设备移动,在移动的过程中,挪栽设备上的 部件便自动把梧桐树幼株栽种到路旁的种植坑中,提高了梧桐树幼株在路旁被栽植的效 率。 现有的用于梧桐树幼株的挪栽设备在使用时扔存在很大的缺陷,现有的挪栽设备 对梧桐树幼株能够装载的数量少,梧桐树幼株装载在挪栽设备上被移动时易倾倒,严重影 响梧桐树幼株被栽植的效率,现有的挪栽设备对梧桐树幼株栽植工作的自动化程度低,使 用十分的费时费力,挪栽设备上的抓取部件对梧桐树幼株抓接的精度差,且对梧桐树幼株 抓接移动的过程中,易对幼株外表皮造成刮擦受损,挪栽设备能够工作覆盖的面积范围小。
技术实现要素:
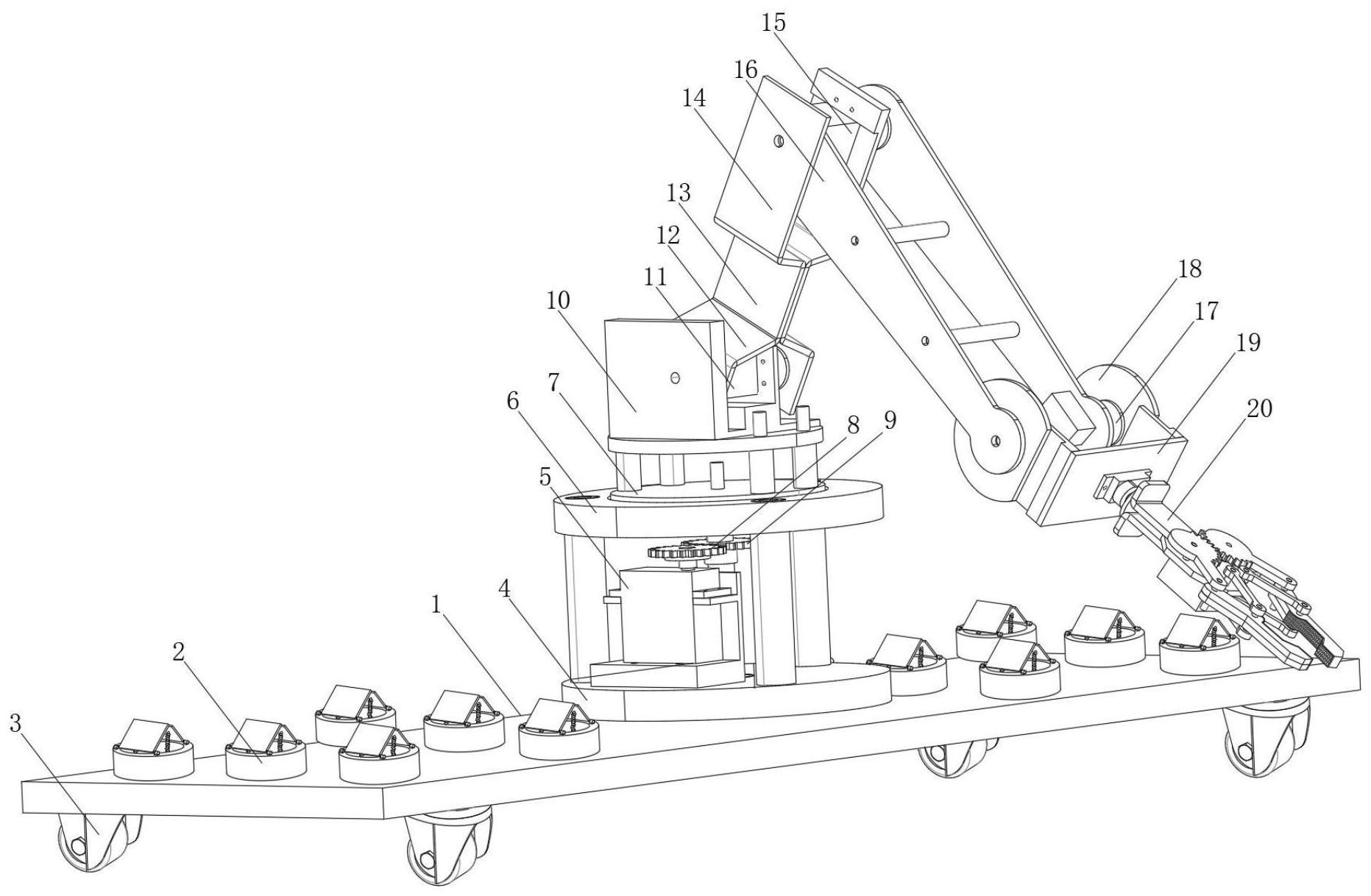
本发明的目的就在于为了解决现有的挪栽设备对梧桐树幼株能够装载的数量少, 梧桐树幼株装载在挪栽设备上被移动时易倾倒,严重影响梧桐树幼株被栽植的效率;现有 的挪栽设备对梧桐树幼株栽植工作的自动化程度低,使用十分的费时费力,挪栽设备上的 抓取部件对梧桐树幼株抓接的精度差;且对梧桐树幼株抓接移动的过程中,易对幼株外表 皮造成刮擦受损;挪栽设备能够工作覆盖的面积范围小的问题,而提出一种用于梧桐树幼 株的移动挪栽设备。 本发明的目的可以通过以下技术方案实现:一种用于梧桐树幼株的移动挪栽设 备,包括水平设置的托载板、内托盘和抓取机构,所述托载板中部设置有圆柱形结构的焊 盘,且托载板两侧均并排设置若干个扣筒,所述托载板底部四角均设置有传动底座,且焊盘 中部上方设置有电机一,且焊盘上方通过竖向设置的支杆垂直连接有圆柱形结构的内托 盘,所述内托盘中部套设有圆形的旋板一,且旋板一上方竖向设置有呈U形结构的挂框,且 挂框底部为水平设置,挂框中部套设有电机二,且电机二两端通过传动轴转动连接有呈U形 结构的第一翻斗,所述第一翻斗上方通过长方体形结构的内连板连接有呈U形结构的第二 翻斗,且第二翻斗上方套设有电机三,所述电机三两侧均通过传动轴转动连接有摆臂,两个 摆臂之间远离电机三的一端套设有电机四,且电机四两侧通过传动轴转动连接有圆形结构 的侧转盘,两个侧转盘之间一端转动连接有呈U形结构的第三翻斗,所述第三翻斗远离电机 四的一端垂直设置有抓取机构; 其中,所述电机一上方通过转轴转动连接有第一齿轮,且旋板一中部下方通过转 柱连接有第二齿轮,所述第一齿轮与第二齿轮啮合连接; 所述扣筒为圆柱形结构,且扣筒中部设置有中空的筒槽,所述扣筒顶部两侧均设 4 CN 111587756 A 说 明 书 2/6 页 置有压板,且压板下端面下方设置有弹簧; 其中,所述压板底部贯穿套设有圆柱形结构的穿轴,且穿轴两端均套设有轴承,穿 轴围绕轴承转动,方便压板进行翻动; 所述抓取机构中部设置有安装板,且安装板下方设置有电机五,安装板上方设置 有两个第三齿轮,两个第三齿轮的连接处均等弧度设置若干个滚齿,且两个第三齿轮通过 滚齿相互啮合连接,所述电机五上方通过传动轴与其中一个第三齿轮转动连接; 两个第三齿轮一端均设置有摆动杆一,且摆动杆一一端套设有套轴一,所述套轴 一下方套设有翻爪,且翻爪中部贯穿套设有套轴二,所述套轴二上方套设有截面为L形结构 的摆动杆二,摆动杆二一端下方连到安装板上,电机五带动两个第三齿轮转动,两个第三齿 轮通过摆动杆一和套轴一带动翻爪翻转活动; 其中,所述翻爪中部设置有内凹的抓槽,且翻爪内壁设置有橡胶垫,将梧桐树幼株 主干夹放在两个翻爪的抓槽之间,随后两个翻爪再进行翻动对梧桐树幼株两侧抓紧,再通 过电机一带动旋板一和抓取机构水平摆动,电机二通过第一翻斗带动抓取机构竖向翻动, 电机三通过摆臂带动抓取机构翻动,再通过电机四带动第三翻斗和抓取机构翻转调节,将 梧桐树幼株更精准的栽放入道路旁预先挖好的种植坑中,通过翻爪内壁的橡胶垫与梧桐树 幼株贴合压紧,保证翻爪对梧桐树幼株抓接更紧固的同时,又不会对梧桐树幼株造成刮擦 受损; 所述传动底座顶部设置有电机六,且电机六下方通过传动轴转动连接有圆柱形结 构的旋板二,所述旋板二底部一端竖向设置有电机七,且电机七一端通过传动轴转动连接 有圆形结构的滚轮。 本发明的进一步技术改进在于:所述电机一通过第一齿轮与第二齿轮和旋板一均 呈转动连接,且旋板一边缘侧壁套设有第二滚轮,第二滚轮一侧与内托盘连接,第二滚轮连 接到内托盘上滚动,保证旋板一在转动时更加平顺。 本发明的进一步技术改进在于:所述弹簧底部固定连接到筒槽底部边缘处,且轴 承底部通过铁块焊接到扣筒上端边缘处。 本发明的进一步技术改进在于:另一个所述第三齿轮中部套设有转轴,转轴底部 连接到安装板上,第三齿轮围绕转轴转动。 本发明的进一步技术改进在于:所述扣筒上方两侧的压板呈对称设置,保证压板 对梧桐树幼株根部施压力度覆盖更全面,梧桐树幼株在该设备上被带动移动时更稳固,且 抓取机构上的两个翻爪呈对称设置,保证两个翻爪能更牢固的对梧桐树幼株进行抓紧。 本发明的进一步技术改进在于:所述抓取机构的一端设置有红外传感器,且红外 传感器与第三翻斗内部设置的PLC控制器通信连接,通过红外传感器检测识别梧桐树幼株 以及路边种植坑的位置,通过PLC控制器控制该设备上的部件将梧桐树幼株栽植到种植坑 中。 本发明的进一步技术改进在于:所述电机六上方通过螺栓与托载板底部螺接固 定。 本发明的进一步技术改进在于:该设备的工作方法具体包括以下步骤: 步骤一:将该设备放置在道路旁,再将多个根部带有泥块的梧桐树幼株分别放到 若干个扣筒的筒槽中,筒槽两侧的弹簧分别牵拉两个压板,通过筒槽两侧上方的压板分别 5 CN 111587756 A 说 明 书 3/6 页 对梧桐树幼株根部两侧进行压夹; 步骤二:四个传动底座上的电机七同步带动滚轮在路面上转动,从而带动该设备 整体移动工作,在移动的过程中,电机一带动第一齿轮和第二齿轮转动,从而带动旋板一和 抓取机构旋转活动,将抓取机构移动靠近梧桐树幼株,随后电机五随即带动第三齿轮转动, 第三齿轮通过滚齿带动另一个第三齿轮转动,来带动两个翻爪翻转,将梧桐树幼株主干夹 放在两个翻爪的抓槽之间,随后两个翻爪再进行翻动对梧桐树幼株两侧抓紧; 步骤三:通过电机一带动旋板一和抓取机构水平摆动,电机二通过第一翻斗带动 抓取机构竖向翻动,电机三通过摆臂带动抓取机构翻动,再通过电机四带动第三翻斗和抓 取机构翻转调节,将梧桐树幼株栽放入道路旁的种植坑中。 与现有技术相比,本发明的有益效果是: 1、本发明在使用时,将该设备放置在道路旁,再将多个根部带有泥块的梧桐树幼 株分别放到若干个扣筒的筒槽中,筒槽两侧的弹簧分别对两个压板提供牵引力,通过筒槽 两侧上方的压板分别对梧桐树幼株根部两侧进行压夹,一方面,保证该设备所能对梧桐树 幼株装载的数量更多,另一方面,保证梧桐树幼株在该设备上被装放移动时更加稳固、牢 靠,避免梧桐树幼株被移动的过程中发生倾倒。 2、在梧桐树幼苗被装载到该设备上后,四个传动底座上的电机七同步带动滚轮在 路面上转动,从而带动该设备整体移动工作,在移动的过程中,电机一带动第一齿轮和第二 齿轮转动,从而带动旋板一和抓取机构旋转活动,将抓取机构移动靠近梧桐树幼株,随后电 机五随即带动第三齿轮,转动,第三齿轮通过滚齿带动另一个第三齿轮转动,来带动两个翻 爪翻转,将梧桐树幼株主干夹放在两个翻爪的抓槽之间,随后两个翻爪再进行翻动对梧桐 树幼株两侧抓紧,通过翻爪内壁的橡胶垫与梧桐树幼株贴合压紧,保证翻爪对梧桐树幼株 抓接更紧固的同时,又不会对梧桐树幼株造成刮擦受损,再通过电机一带动旋板一和抓取 机构水平摆动,电机二通过第一翻斗带动抓取机构竖向翻动,电机三通过摆臂带动抓取机 构翻动,再通过电机四带动第三翻斗和抓取机构翻转调节,将梧桐树幼株更精准的栽放入 道路旁预先挖好的种植坑中,如此反复工作,将该设备上装载的多个梧桐树幼株分别进行 挪栽工作,该设备工作的自动化程度高,使用省时省力,且对梧桐树幼株抓接、栽放的位置 更精准。 3、电机一带动旋板一和抓取机构旋转活动,电机二通过第一翻斗带动抓取机构竖 向翻动,电机三通过摆臂带动抓取机构翻动,再通过电机四带动第三翻斗和抓取机构翻转 调节,一方面,保证抓取机构对梧桐树幼株抓取更高效,另一方面,保证该设备能够带动抓 取机构和梧桐树幼株调节活动的范围更大,提高了该设备工作的覆盖面积,且两个翻爪翻 转活动,传动底座上的电机六通过旋板二带动滚轮转动调节,能灵活调节该设备行进的位 置和方向,使该设备能更快、更精准的将梧桐树幼株挪栽到路边的种植坑中。 附图说明 为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。 图1为本发明整体立体结构示意图。 图2为本发明扣筒结构示意图。 图3为本发明抓取机构结构示意图。 6 CN 111587756 A 说 明 书 4/6 页 图4为本发明传动底座正视图。 图中:1、托载板;2、扣筒;3、传动底座;4、焊盘;5、电机一;6、内托盘;7、旋板一;8、 第一齿轮;9、第二齿轮;10、挂框;11、电机二;12、第一翻斗;13、内连板;14、第二翻斗;15、电 机三;16、摆臂;17、电机四;18、侧转盘;19、第三翻斗;20、抓取机构;21、筒槽;22、压板;23、 弹簧;24、轴承;25、穿轴;26、安装板;27、电机五;28、第三齿轮;29、滚齿;30、摆动杆一;31、 套轴一;32、翻爪;33、套轴二;34、摆动杆二;35、抓槽;36、橡胶垫;37、电机六;38、旋板二; 39、电机七;40、滚轮。











