
技术摘要:
一种可跨越窗框的玻璃清洁机器人,一种可跨越窗框的玻璃清洁机器人,包括随动架,所述随动架前端面上下对称滑动设有横支撑架,所述横支撑架中设置有伸缩支架腔,所述伸缩支架腔中左右对称安装有伸缩支架;本发明结构简单,使用简便,在清洁时,对边角均可以进行请理, 全部
背景技术:
高楼层玻璃清理是一项很重要的工作,在现有清理领域中主要还是人工进行清 理,人工清理不仅危险而且费用高,于是出现很多关于高楼清理的机器,但是现有的技术中 主要还存在大量的问题,例如窗框和死角无法清理,无法安全跨越窗框并且清理窗框等,针 对以上缺点,本发明进行了改进。
技术实现要素:
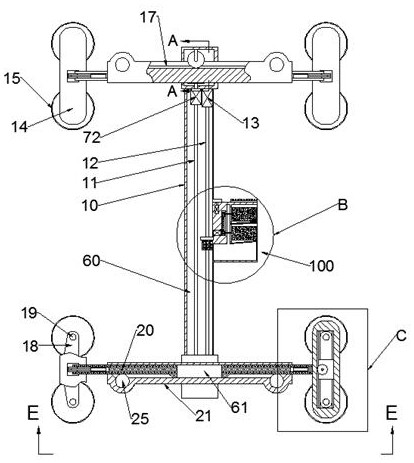
本发明要解决的技术问题是提供一种可跨越窗框的玻璃清洁机器人,克服了上述 的问题。 本发明是通过以下技术方案来实现的。 本发明的一种可跨越窗框的玻璃清洁机器人,包括随动架,所述随动架前端面上 下对称滑动设有横支撑架,所述横支撑架中设置有伸缩支架腔,所述伸缩支架腔中左右对 称安装有伸缩支架,所述伸缩支架腔两端设有伸缩架齿轮,所述伸缩架齿轮与所述伸缩支 架靠近齿轮侧齿条啮合,所述伸缩支架外端设置有开口槽,所述开口槽中转动安装有液压 杆,所述液压杆外端铰接安装有吸盘转向架,所述吸盘转向架通过转动销转动在所述开口 槽中,所述吸盘转向架一端固定设置有吸盘行动架,所述吸盘行动架内固定安装有移动齿 条,所述移动齿条左侧啮合安装有吸盘齿轮,所述吸盘行动架中滑动设有,所述吸盘齿轮下 侧与所述滑动块转动连接,所述吸盘行动架下方安装有吸盘支撑架,所述吸盘支撑架 内部 安转有电机,所述电机与所述吸盘齿轮通过在动力轴连接,所诉电机左侧安装有信号接收 器,所述吸盘支撑架下方设置有吸盘伸缩缸,所述吸盘伸缩缸下方通过液压杆连接有吸盘, 所述随动架中设置有随动架腔,所述随动架腔中设有双轴电机,所述双轴电机上下侧动力 连接有传动轴,所述随动架中上下对称设有齿轮腔传动轴,所述传动轴上下端分别延伸至 上下所述齿轮腔中,所述传动轴末端连接有主动锥齿轮,所述主动锥齿轮上端啮合有从动 锥齿轮,所述从动锥齿轮前侧端面固定连接有主动传动齿轮,所述齿轮腔中设有与所述主 动传动齿轮啮合的从动传动齿轮,所述从动传动齿轮前侧端面固定连接有横行齿轮,所述 齿轮腔前端面中设有前后贯穿的安装孔,所述横支撑架滑动安装在所述安装孔中,所述齿 轮腔中设有与所述横支撑架固定连接的随动架齿条,所述随动架齿条与所述横行齿轮啮 合,所述随动架上设有可上下运动的玻璃清洁机构。 进一步地,所述玻璃清洁机构包括安装在所述随动架右后方的玻璃清理箱,所述 玻璃清理箱可沿所述随动架上下运动,所述玻璃清理箱上侧安装有喷水口,所述玻璃清理 箱左侧安装有清理电机,所述清理电机右侧转动连接有初檫滚轮,所述初檫滚轮下侧安装 有刮水板,所述玻璃清理箱右方设置有排水腔,所述玻璃清理箱下方设置有废水收集箱,所 述排水腔与所述废水收集箱之间连通。 3 CN 111543907 A 说 明 书 2/4 页 进一步地,所述玻璃清理箱左侧安装有转动电机,所述转动电机上端通过动力轴 连接有齿轮,所述齿轮与所述随动后侧通过扇形齿轮转动连接。 进一步地,所述刮水板下方安装有二次滚轮,所述清理电机右侧安装有皮带轮,所 述皮带轮可带动所述初檫滚轮、所述二次滚轮同步转动。 进一步地,所述随动架腔中竖立设有丝杠,所述传动轴与所述丝杠平行设置,所述 丝杠上端固定设有丝杠电机,所述丝杠上安装有螺母,所述螺母与所述玻璃清理箱固定连 接。 进一步地,所述吸盘中设有清理盘,所述清理盘在所述吸盘吸附在玻璃上时对玻 璃进行擦拭清洁。 本发明的有益效果 :将该设备放置在高楼外墙后,该设备将会直接在外墙玻璃上 进行自由移动,移动到指定位置后,对玻璃以及各种边角均可以进行清洁,在当清洁完成整 块玻璃以后,就会通过移动部件进行移动到下一块玻璃,在移动时,若遇见窗框,则会先进 行清理再进行改变移动状态,安全的移动至下一块玻璃。 附图说明 为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有 技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是发明 的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 这些附图获得其他的附图。 图1是本发明整体结构示意图; 图2是图1中E-E处结构示意图; 图3是图1中A-A处结构示意图; 图4是图1中B处结构示意图; 图5是图2中D处结构示意图; 图6是图1中C处结构示意图。











