
技术摘要:
一种VTS雷达配置信号覆盖优化方法,包括以下步骤:S1、识别分析雷达信号覆盖范围的影响因素;S2、基于电磁波传播效应、目标障碍物、雷达最大探测距离和目标RCS值模型,构建雷达信号覆盖范围模型;S3、基于所述雷达信号覆盖范围模型绘制雷达信号覆盖范围图像;S4、基于 全部
背景技术:
VTS(船舶交通服务)是保证内河和海上交通安全的重要保障,其中雷达站是VTS系 统中最为核心的组成部分之一,雷达站作为雷达的载体和运行场所,其位置的选取,一方面 对雷达能够发挥正常功能有着重要影响,另一方面对VTS系统整体功能有着决定性影响,但 是目前VTS系统中雷达站的选址、雷达设备配置主要是以人的主观决策为主,缺少科学方法 的指导,这会导致相邻雷达站的信号无法完成无缝衔接或雷达信号重复区域较大,而且在 许多港口建设中,特别是山脉地形、大型水工建筑物等对雷达信号有遮蔽影响,使其存在一 定盲区。因此,构建VTS雷达信号覆盖优化分析模型方法对VTS选址、雷达站设备配置、水工 工程建设等有着重要意义。
技术实现要素:
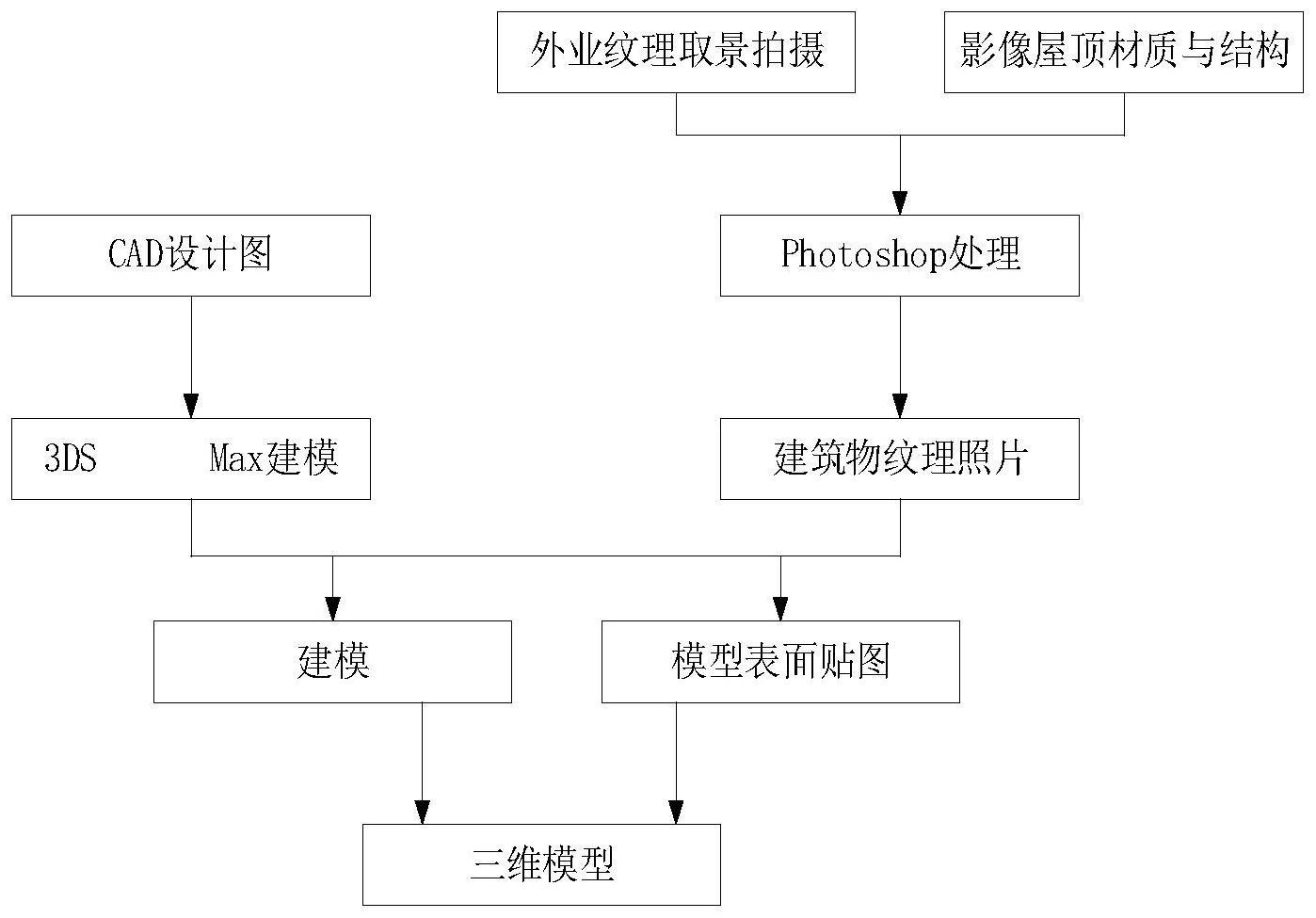
本发明解决的技术问题在于提供一种VTS雷达配置信号覆盖优化方法,具体采用 了如下技术方案: 一种VTS雷达配置信号覆盖优化方法,包括以下步骤: S1、识别分析雷达信号覆盖范围的影响因素; S2、基于电磁波传播效应、目标障碍物、雷达最大探测距离和目标RCS值模型,构建 雷达信号覆盖范围模型; S3、基于雷达信号覆盖范围模型绘制雷达信号覆盖范围图像; S4、基于雷达最大探测范围和雷达盲区最小两个选址影响因素,采取双目标优化 方法对VTS雷达站选址问题进行建模; S5、利用遗传算法求解构建的双目标选址模型; S6、基于求解后的双目标选址模型优化VTS雷达配置信号覆盖范围。 进一步的,步骤S2中,所述的目标障碍物模型建立方法为: S21、使用高分辨率相机对目标建筑物采样取景获取细节照片; S22、在3DS Max进行模拟操作,使用图像处理软件对图像的细节进行处理后保存; 具体包括: (1)外业取景:通过高分辨率相机,对目标建筑物拍摄获取建筑物视景; (2)数据导入:结合拍摄的像片或航片,导入处理后的CAD矢量线,构建完整建筑模 型; (3)处理纹理:使用图像处理软件对外业像片数据进行内业处理,使相片与建筑物 结构相符; (4)构建三维模型:对压缩模型进行优化处理,删除隐藏面,从而降低模型点、线、 面数量,使运算速率进一步提升; 5 CN 111610494 A 说 明 书 2/8 页 (5)添加模型:将三维模型数据转换为DEM数据,将DEM数据导入电子海图系统并覆 盖原有的高程点,实现三维模型的添加。 进一步的,步骤S3中,所述的雷达回波覆盖范围图像绘制方法为: S31、将DEM数据上的栅格点与屏幕像素点一一对应; S32、从X轴正方向开始顺时针计算扫描线,计算属于该扫描线上点的坐标(x,y)和 所有栅格点的原始坐标(x',y');若扫描线与y轴正方向的夹角为α,则该扫描线上栅格点的 雷达方位角β为: S33、识别扫描线上栅格点标记位;若flag=false则计算该点像素值雷达回波强 度,若flag=true则跳过该点,继续识别该扫描线上其他像素点,并令计算完的像素点标记 位flag=true; S34、上色操作:若目标未被遮挡,根据上色公式对该像素点上色;若被遮挡,该点 无雷达回波强度,则设为无色透明; S35、当当前扫描线栅格点计算完后,沿顺时针方向依次计算扫描线,当扫描线再 次遇到标记位flag=true时,结束扫描线计算,雷达图像绘制完毕。 进一步的,步骤S4中,基于雷达最大探测范围和雷达盲区最小两个选址影响因素 具体包括: S41、从雷达探测目标的角度,在雷达站部署位置最佳、雷达天线高度最优的情况 下,雷达信号覆盖范围最大; S42、从雷达探测目标的可靠性角度,在目标点满足一定雷达探测概率下,使雷达 信号覆盖的盲区最小。 进一步的,步骤S4中,采取双目标优化方法对VTS雷达站选址问题进行建模具体包 括: 选择p个雷达站进行选址,使得某水域雷达站优化选址模型满足以下两个目标函 数的要求: (1)从雷达信号覆盖效果分析,要求雷达信号覆盖整个水域; (2)从雷达探测目标可靠性分析,要求整个水域雷达盲区最小; λ≥0.85 (14) Ff≤rmax (15) p=12 (16) jf∈{0,1} (17) 6 CN 111610494 A 说 明 书 3/8 页 其中,式11表示雷达信号覆盖范围最大;式12表示雷达盲区范围最小;式13表示每 个水域单元至少被覆盖1次;式14表示雷达探测目标概率要大于0.85;式15表示雷达站间距 小于雷达最大探测距离;式16表示雷达站的数量为p部;式17表示为雷达站的变量服从0-1 约束。 进一步的,步骤S5具体包括: S51、随机产生个体数目一定的种群并进行初始化,采用二进制编码方式对求解问 题进行编码;假设对N部雷达进行选址,1,2,Λ,n表示对应的雷达站候选点位置;1,2,Λ,m 表示对应雷达天线候选高度,染色体总长度为n*m; S52、适应度值计算:适应度函数设计为g=P1f1 P2f2,f1为优化模型的第一目标函 数,f2为第二目标函数,P1、P2是目标函数的决策系数; S53、选择操作:在每代种群中,选择适应度较高的个体组成新的种群,繁殖得到下 一代个体;假设fit(xi)为个体的适应度值,则个体i被选中的概率为: S54、交叉操作:因为雷达位置坐标采用二进制编码,所以交叉操作采用实数交叉 法,第n个染色体bn和第m个染色体bm在k位的交叉操作方法为: bnk=bmk(1-q) bmkq,bmk=bnk(1-q) bnkq; 其中,q是[0,1]区间的随机数; S55、变异操作:采用随机的方法选择变异个体和确定基因串变异位置,若种群数 目为N,个体染色体基因数目为L,每代种群个体变异的基因数目为B,则变异概率为:pm=B/ LN; S56、当遗传算法到达最大迭代次数时,选择末代个体中适应度最高的作为最优 解,结束运算。 本发明的有益效果:本发明提出的一种VTS雷达配置信号覆盖优化方法,构建了考 虑电磁波传播效应、目标障碍物的遮蔽和目标RCS值的计算的雷达回波覆盖范围模型,可以 得到考虑多因素的雷达回波覆盖范围图像。相比于传统的雷达覆盖模型,本发明构建选址 模型同时考虑了雷达覆盖范围最大和盲区最小两个目标,在雷达站优化地址上更经济且更 具优越性。 附图说明 附图1为本发明实施例中3DS max建模流程图。 附图2为本发明实施例中扫描线示意图。 附图3为本发明实施例中栅格点位置示意图。 附图4为本发明实施例中雷达位置部署右侧和左侧时回波覆盖范围图。 附图5为本发明实施例中修改参数前后的雷达回波覆盖范围图。 附图6为本发明实施例中添加武汉长江大桥前后的雷达回波覆盖范围图。 附图7为本发明实施例中2个目标的解集分布。 附图8为本发明实施例中非劣解集的欧氏距离折中解。 附图9为本发明实施例中位置对比分析图。 7 CN 111610494 A 说 明 书 4/8 页











