
技术摘要:
本发明属于地址灾害探测技术领域,尤其涉及基于机载激光雷达的一种地质灾害探测识别方法,包括:采集步骤,采集环境点云数据;分类步骤,按地表点云及干扰点云对环境点云数据进行分类,并提取地表点云;圈定步骤,用预设的网格对地表点云进行区域圈定,将地表点云进行 全部
背景技术:
目前,新技术在地质灾害防治工作中应用得越来越广泛,高分辨率遥感技术、无人 机倾斜摄影技术、insar技术、机载激光雷达技术等遥感探测技术在地质灾害识别与监测中 应用的越来越广。 但是各种方法都有技术瓶颈,尤其是在高植被覆盖的西南山区,受植被的影响很 多识别方法都存在不同的技术瓶颈。主要表现为:(1)高分遥感技术主要是解决平面二维识 别,通过建立遥感解译标志进行地质灾害识别,对危岩崩塌主要是通过解译崩塌范围进行 识别,无法对危岩体进行识别和量测。(2)无人机倾斜摄影测量实现了三维识别,可以获取 危岩体和崩塌范围,实现危岩体和崩塌范围的识别和量测,但是无法除去植被信息,获取原 始的地表信息。(3)insar技术主要受地形的影响,受地形遮挡,存在数据盲区,虽然具有一 定的植被穿透能力,主要缺点是空间分辨率低,存在数据盲区。(4)无人机机载激光雷达技 术,相对于其余三种技术具有很强的优势,主要缺点是设备昂贵,植被还是存在一定的影 响,高植被覆盖区还是存在部分地面点不足,影响判别。 除此,机载激光雷达获取虽然获取了很多点云数据,通过分类后发现很多是植被 点云,尤其是高植被覆盖区,地表点云部分区域十分稀疏,尤其是夏季阔叶植被可能遮挡点 云,导致植被下无地表点云。受覆盖植被的影响导致部分地表点云空白,不能真实反映地表 信息。 因此,需要基于机载激光雷达的一种地质灾害探测识别方法,能够更加精确的探 测地表状态。
技术实现要素:
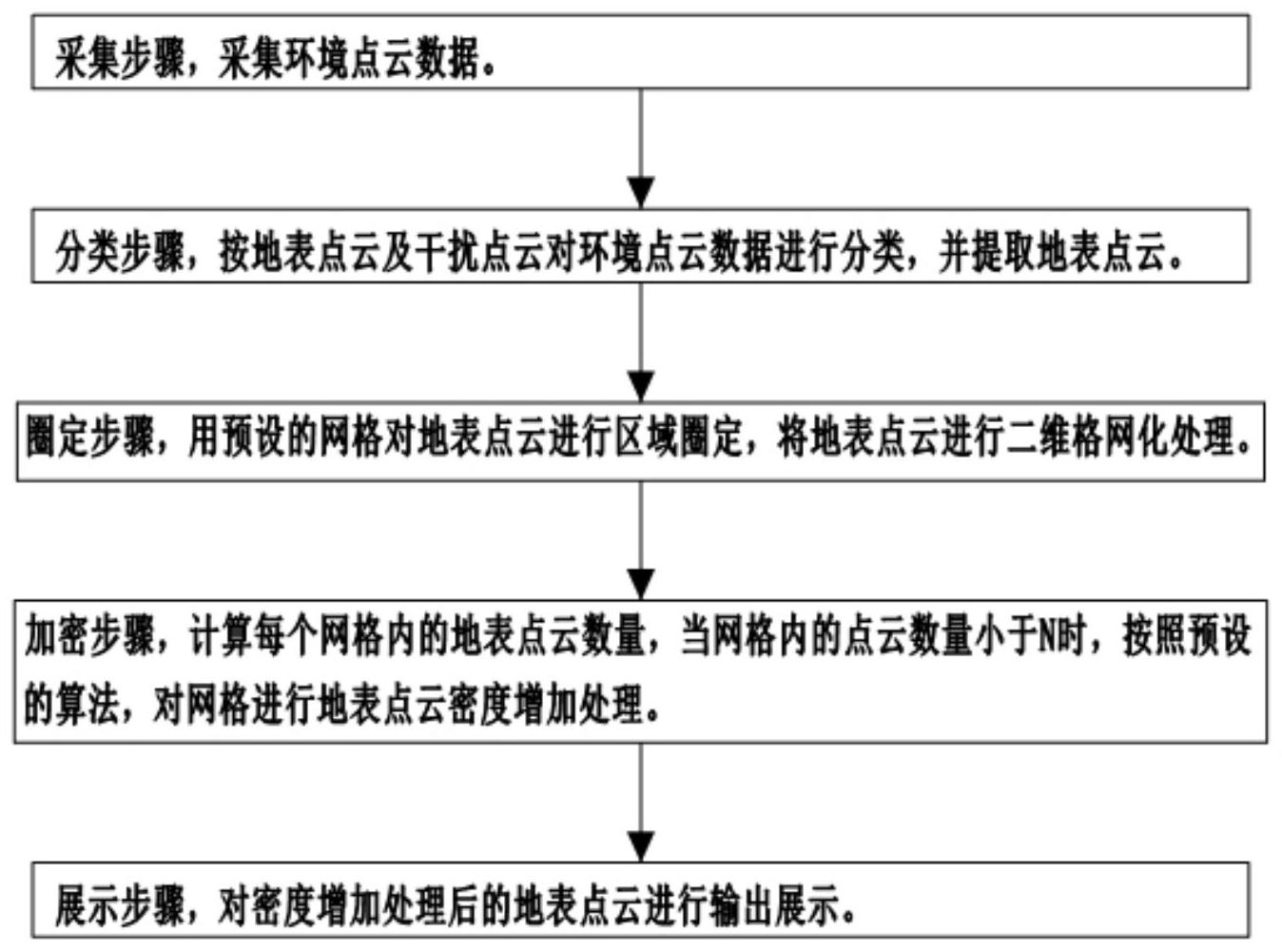
本发明的目的在于,提供了基于机载激光雷达的一种地质灾害探测识别方法,能 够更加精确的探测地表状态。 本发明提供的基础方案为: 基于机载激光雷达的一种地质灾害探测识别方法,包括: 采集步骤,采集环境点云数据; 分类步骤,按地表点云及干扰点云对环境点云数据进行分类,并提取地表点云; 圈定步骤,用预设的网格对地表点云进行区域圈定,将地表点云进行二维格网化 处理; 加密步骤,计算每个网格内的地表点云数量,当网格内的地表点云数量小于N时, 按照预设的算法,对网格进行地表点云密度增加处理; 展示步骤,对密度增加处理后的地表点云进行输出展示。 3 CN 111551956 A 说 明 书 2/4 页 基础方案工作原理及有益效果: 由于地表点云及干扰点云皆为三维坐标,在采集环境点云数据后,可以根据点云 数据的特点,将点云数据分成地表点云和干扰点云(如树木),并将地表点云提取出来。通过 这样的方式,能够将采集的点云数据进行筛分,选出真正有用的地表点云数据。 之后,用预设的网格对地表点云进行区域圈定,将地表点云进行二维格网化处理, 并计算每个网格内的地表点云密度,若某个网格内的点云数量小于N,说明该网格所在区域 的地表点云过少,该区域被植被遮挡的比例过大,仅凭采集的地表数据难以充分展示完整 的地形。因此,按照预设的算法,对该网格所在区域进行地表点云密度增加处理,使该网格 内拥有足够的地表点云数据。 最后,将对密度增加处理后的地表点云进行输出展示。这样,探测人员看到的输出 画面,是已经将植被遮挡区域进行地表还原处理后的画面。这样的画面,能够更加真实、完 整的反应真正的地表。 与现有技术相比,使用本方法,能够更加精确的探测地表状态。 进一步,加密步骤中,增加网格内点云密度的处理方法为,选取距离网格距离最近 的M个点后,用曲面拟合的方式进行曲面拟合,再利用曲面反算提取网格中的特征拐点坐标 信息,生成新的地表点云信息,使网格中的地表点云数量不小于预设数量。 采用这样的方式,能够充分利用已有的地表点云数据,同时,采用曲面拟合的方 式,得到的拐点坐标信息,能够较为精确的将对应地表云点进行还原。除此,曲面拟合的模 型较为常用,其技术较为成熟,运行效率也很高。 进一步,展示步骤中,将地表点云数据,利用点云处理软件构建三角网,生成效果 图后,进行输出展示。 这样展示的内容,便于工作人员直观的了解地形的情况。 进一步,展示步骤中,生成的效果图包括DEM和坡度图。 通过DEM和坡度图,能够较好的还原原始地形地貌,便于工作人员进行地质灾害识 别。 进一步,加密步骤中,若网格内的点云数量为0,则对网格进行等距离加密。 这样的加密方式,对于网格内点云数量为0的网格而言,能够较好的还原其地形。 进一步,N的数值大于3。 若N的数值太小,网格内的地表点云难以准确展示区域的完整地形。 进一步,N的数值小于10。 这样数量的地表点云,已经可以较好的对网格区域进行地形还原。 进一步,M的数值大于3。 若M的数值太小,难以有效的进行曲面拟合,得到结果的可信度也难以保证。 进一步,网格的大小为2m*2m。 这样大小的网格,在保证精细化的同时,能够兼顾采集的地表点云数据的有效利 用率。 进一步,采集步骤中,用机载激光雷达进行环境点云采集。 与其他的探测手段相比,机载激光雷达的数据获取灵活,数据量大,测量精度高, 相对精度可以达到5cm,并且对植被具有一定的穿透能力。 4 CN 111551956 A 说 明 书 3/4 页 附图说明 图1为本发明基于机载激光雷达的一种地质灾害探测识别方法实施例一的示意 图。











