
技术摘要:
本发明公开了一种二级Stewart机构并联构型六自由度振动激励系统,采用二级Stewart机构六自由度并联构型,包括十二条作动器支路、多条空气弹簧支路、多条辅助支撑支路、上平台组件、下平台组件及实时控制硬件系统;上、下平台组件由十二条作动器支路、空气弹簧支路、辅 全部
背景技术:
高精度载荷、精密仪器等在执行任务中不可避免地受到来自其载运工具自身或外 界的机械振动干扰,且呈现出多自由度线角振动耦合、高频与低频振动共存等特点,极大地 影响了其控制精度和稳定水平,因此在实验室(内场)环境下检验设备在多自由度复杂振动 干扰下的工作状态及并进行调试具有重要的工程意义。 为试件提供振动信号所用到的典型设备是振动台,目前单自由度振动台已得到广 泛应用,但其仅能提供单轴平动或通过工装转接成单轴转动的振动信号,随着工程技术的 进步及对振动环境认识水平的提高,单自由度的振动模拟已日益不能满足高精度载荷、精 密仪器等的试验需求。目前多自由度的振动模拟设备仍少有研发成果,在各个领域更是少 有实际应用。因此,研发多自由度的振动模拟系统具有重要的现实意义。
技术实现要素:
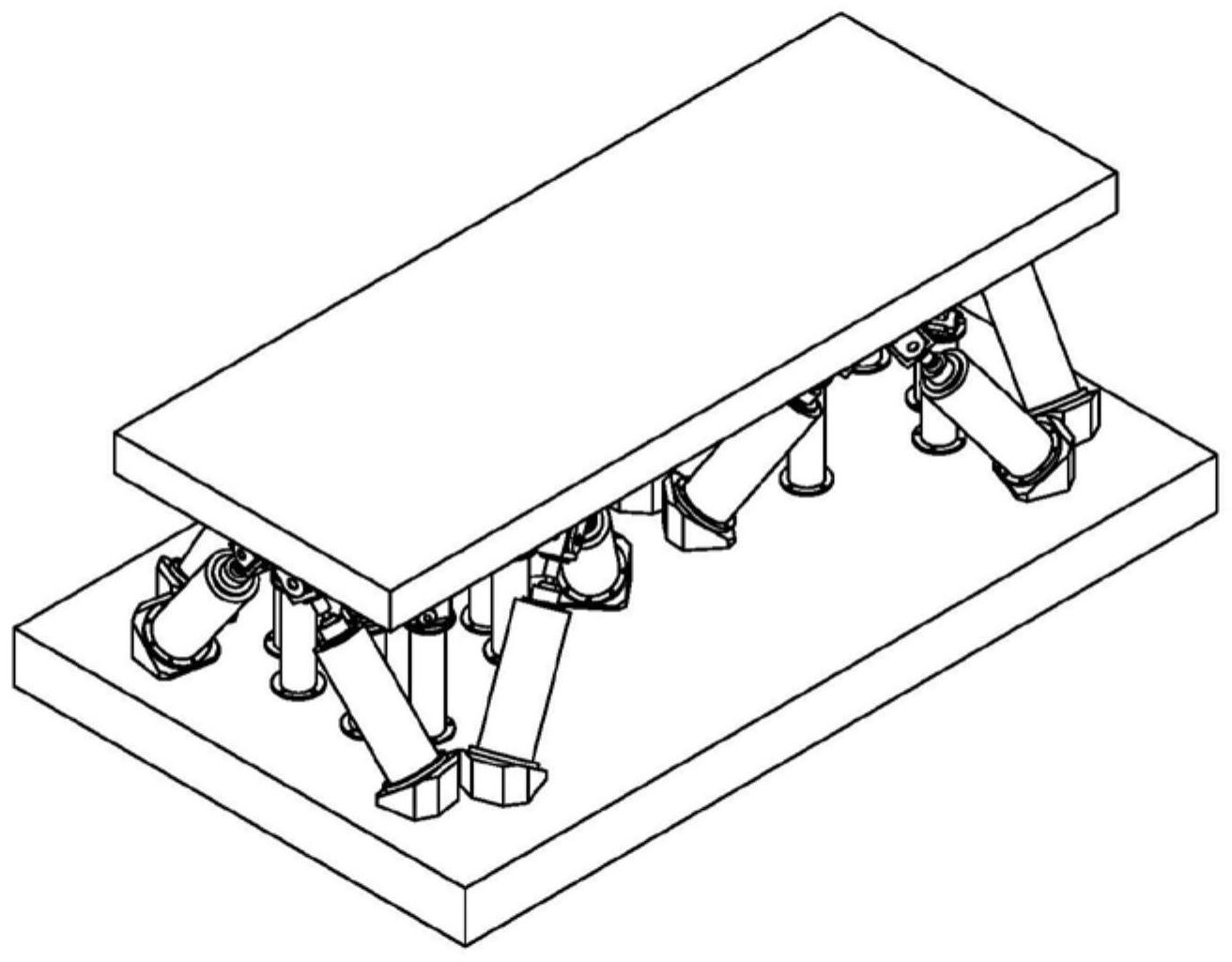
本发明要解决的技术问题是:针对单自由度振动台难以满足多自由度振动模拟的 试验需求,提出一种新型的六自由度振动激励系统,可用于同步模拟最多六自由度的振动 信号,为试件(高精度载荷、精密仪器等)提供星载、弹载、机载、舰载或车载等复杂环境下的 多自由度振动激励,以检验其在复杂振动干扰环境下的稳定水平和控制精度,或进行功能 性能测试与标定等。 本发明解决上述技术问题采用的技术方案是:一种二级Stewart机构并联构型六 自由度振动激励系统,采用二级Stewart机构六自由度并联构型,包括十二条作动器支路、 多条空气弹簧支路、多条辅助支撑支路、上平台组件、下平台组件及实时控制硬件系统;其 特征在于: 系统的机构构型为二级Stewart机构六自由度并联构型,其十二条作动器支路分 为两组,每组在在空间中的布局方式为Stewart构型,此两组Stewart构型通过并联方式组 成二级Stewart机构六自由度并联构型; 所述的二级Stewart机构六自由度并联构型将十二条作动器支路分为两组,每组 六条作动器组成一个经典Stewart构型机构;每个Stewart经典构型上台面均为水平面;两 个Stewart构型机构在同一个水平面高度上,并且两个Stewart构型机构的上台面中心连成 一条直线,整台上台面中心在此直线之上,布局方式为两个Stewart构型机构的上台面中心 绕整台中心的Z轴旋转对称,即两个Stewart经典构型的上台面中心与整台上台面中心所连 射线方向互成180°夹角,绕整台中心的Z轴旋转180°后两个Stewart经典构型的上台面中心 完全重合;两个Stewart经典构型的上台面中心在以整台上台面中心为圆心,以一定距离为 半径的圆上; 5 CN 111551329 A 说 明 书 2/10 页 所述的空气弹簧支路,每条包括一个空气弹簧及其相关连接件,对所连接的上台 面产生相应的竖直支撑力; 所述的辅助支撑支路,每条包括一个螺纹丝杆升降机、一个S型力传感器及其相关 连接件,在充气或非工作状态下对上台面产生相应的竖直支撑力; 所述的实时控制硬件系统包括控制计算机、多通道A/D数据采集卡、多通道D/A数 据输出卡、功率放大器、加速度传感器、力传感器、位移传感器、信号调理器及传感器工装; 其中加速度传感器经传感器工装安装于上平台组件,力传感器通过连接件安装于辅助支撑 系统支路,位移传感器经传感器工装安装于作动器支路,多通道A/D数据采集卡及多通道D/ A数据输出卡安装于控制计算机机箱内,A/D采集卡通过屏蔽线、接线盒与传感器及其配套 信号调理器相连,D/A输出卡通过BNC屏蔽线与功率放大器相连,功率放大器与作动器一一 配套,组成实时硬件控制系统的控制回路;加速度传感器用于测量上平台的六自由度加速 度,经过信号调理器、多通道A/D数据采集卡作为反馈信号,经过控制计算机进行解算产生 在二级Stewart机构六自由度并联构型下的控制信号,再经过多通道D/A数据输出卡、功率 放大器产生驱动信号,进而控制作动器输出轴向运动,推动上平台组件产生期望的模拟振 动信号;力传感器用于测量辅助支撑系统对上台面的支撑力,经多通道A/D数据采集卡作为 反馈信号,经过高速控制计算机进行解算产生在二级Stewart机构六自由度并联构型下的 控制信号,再经过多通道D/A数据输出卡产生充放气控制信号,控制各空气弹簧支路的充放 气过程;位移传感器用于测量各作动器支路电机的位置,经过信号调理器、多通道A/D数据 采集卡作为反馈信号,经过控制计算机进行解算产生在二级Stewart机构六自由度并联构 型下的位移闭环控制信号,再经过多通道D/A数据输出卡、功率放大器产生驱动信号,进而 控制作动器位置稳定于中心位置附近,保持上平台组件的安全与稳定。 进一步的,所述的构型为二级Stewart机构六自由度并联构型,包括两个并联的经 典单级Stewart构型;其中的经典单级Stewart构型包括上台面、下台面、6条作动器支路以 及空气弹簧支路或辅助支撑支路,每条作动器支路经由上铰点与上台面相连,每条作动器 支路经由下铰点与下台面相连,六个上铰点与六个下铰点分别分布于上台面包络圆以及下 台面包络圆上;每两个相邻上铰点可分为一组,共三组,每组上铰点与上台面中心形成的夹 角相同,每两个相邻下铰点可分为一组,共三组,每组下铰点与下台面中心形成的夹角相 同;经典单级Stewart构型以上台面中心指向某一组上铰点中点方向为X轴正方向,以下台 面中心指向上台面中心方向为Z轴正方向,并满足右手坐标系。 进一步的,两个经典单级Stewart构型的排布方向共有四种实现方式: 实现方式1为每个经典单级Stewart构型X轴正方向均指向每个经典单级Stewart 构型上台面中心与整台上台面中心连线的反方向,即单级X轴正方向向外的旋转对称实现 方式; 实现方式2为每个经典单级Stewart构型X轴正方向均指向每个经典单级Stewart 构型上台面中心与整台上台面中心连线的方向,即单级X轴正方向向内的旋转对称实现方 式; 实现方式3为两个经典单级Stewart构型X轴正方向同向,均与整台的X轴方向平 行,即单级X轴方向与整台X轴方向平行的旋转对称实现方式; 实现方式4为两个经典单级Stewart构型X轴正方向同向,均与整台的X轴方向垂 6 CN 111551329 A 说 明 书 3/10 页 直,即单级X轴方向与整台X轴方向垂直的旋转对称实现方式。 进一步的,所述的作动器支路分为十二条,为系统提供精确可控的输出力,每条支 路包括作动器、铰链组件、转接板和下连接块;其中铰链组件包括球铰底座、球铰球头、球铰 上连接件、中U形叉和上U形叉;各部分通过如下连接方式组成十二条作动器支路: 球铰底座与球铰球头通过外六角螺钉互相配合安装,球铰球头与球铰上连接件通 过螺纹安装,球铰上连接件与中U形叉通过外六角螺钉平行安装,中U形叉与上U形叉通过十 字轴、两对滚动轴承以及外六角螺钉互相垂直安装,组成铰链组件1;铰链组件1中的球铰底 座与作动器动圈通过转接板进行连接,并通过定位孔保证铰链组件各自由度旋转中心连线 与动圈轴线相合;下连接块通过内六角螺钉安装于作动器底部,并通过定位销与作动器底 部定位孔进行定位; 十二条作动器支路安装方式相同,并通过定位销与上平台组件相连,通过下连接 块与下平台组件相连,形成六自由度振动模拟系统的机械运动部分。 进一步的,所述的空气弹簧支路分为八条,为工作时系统运动部分提供抵消重力 的支撑力,布局方式为四个空气弹簧支路为一组,呈四边形分布,每组空气弹簧支路分别实 现对单级Stewart经典构型的支撑; 八条空气弹簧支路安装方式相同,并通过外六角螺钉分别与上平台组件、下平台 组件相连,形成具有调节支撑力的六自由度振动模拟系统的空气弹簧支撑部分。 进一步的,所述的辅助支撑支路分为六条,为试验结束时和自动充气时的系统运 动部分提供抵消重力的支撑力,并且将自动充气时提供的支撑力作为反馈信号输入自动充 气控制系统,布局方式为三个辅助支撑支路为一组,呈三角形分布,每组辅助支撑支路可实 现对单级Stewart经典构型的支撑; 六条辅助支撑支路安装方式相同,并通过定位块与上平台组件相连,通过外六角 螺钉与下平台组件相连,形成具有提供支撑力以及反馈支撑力信号的六自由度振动模拟系 统的辅助支撑部分。 进一步的,所述的上平台组件,为试件提供刚性的机械安装台面,并能通过测得的 加速度信号来观测所模拟的振动信号;其组成包括上平台、六个上铰链座、中心传感器座、 侧面传感器座、六个加速度传感器;上平台下表面边缘有六个定位槽,分别与六个上铰链座 相连;中心传感器座安装于上平台下表面中心处,通过三个安装孔分别与传感器1、传感器2 和传感器3相连,用于测得上平台沿X、Y和Z轴的平动加速度;传感器4通过螺柱连接于上平 台下表面Y轴与加强筋交点处,用于测得上平台绕X轴的转动加速度;侧面传感器座安装于 上平台下表面X轴与加强筋交点处,通过两个安装孔与传感器5和传感器6相连,用于测得上 平台绕Y、Z轴的转动加速度。 进一步的,所述的下平台组件,用于为系统提供稳定的安装基础,并通过地脚螺钉 与地基固连,将系统自身的振动传递给隔振地基,保护周边设备。 进一步的,所述的作动器支路,每条包括一套精密铰链组件、一个作动器及其相关 连接件;铰链组件包括一个两自由度铰链和一个三自由度铰链,具备五自由度的转动;两自 由度铰链包括一根十字轴、两对滚动轴承及其相关连接件,形成一个两自由度虎克铰,三自 由度铰链包含一根竖轴、一个万向球铰及其相关连接件,形成一个三自由度转动铰链;作动 器为由动圈和定磁组件组成的直线动磁式电机,具备输出电磁作动力进而控制动圈的沿轴 7 CN 111551329 A 说 明 书 4/10 页 向线性运动的能力;铰链组件通过转接板与作动器相连组成作动器组件,作动器组件通过 上铰链座与上平台相连,通过下连接块与下平台组件相连。 本发明的优点在于: (1)本发明设计了一种六自由度的振动激励系统,具有带负载下的六自由度运动 能力,可以产生最多六自由度的振动激励信号; (2)本发明设计了一种新型的六自由度并联机构的构型——二级Stewart机构六 自由度并联构型,按该构型布局的六自由度并联机构具有较大的工作空间以及较大的负载 能力;前者意味着选用相同作动器的情况下,本系统可以获得更大的平动和转动空间;后者 意味着本系统的上平台尺寸可以设计得较大,同时多条空气弹簧支路和辅助支撑支路可提 供抵消负载重力的额外支撑力,这使得本系统具有较大的承载能力,并且负载尺寸可以较 大; (3)本发明形成了以直线动磁式电机为中心的作动机构,结构简单、坚固的同时也 具有直线动磁式电机的输出线性度好、响应快及可靠性高等优点; (4)本发明除了上平台尺寸较大外,所设计的铰链组件等其他机械部件也可以承 受负载较大的重力,这使得本发明的二级Stewart机构并联构型六自由度振动激励系统的 可装载负载质量较大,进而使其具有较大的承载能力以及较高的工作带宽。 附图说明 图1为本发明的等轴测图; 图2为本发明的二级Stewart机构六自由度并联构型简图; 图3为本发明的二级Stewart机构六自由度并联构型实现方式1的俯视图; 图4为本发明的二级Stewart机构六自由度并联构型实现方式2的俯视图; 图5为本发明的二级Stewart机构六自由度并联构型实现方式3的俯视图; 图6为本发明的二级Stewart机构六自由度并联构型实现方式4的俯视图; 图7为本发明的主视图; 图8为本发明的后视图; 图9为本发明的下平台组件1俯视图; 图10为本发明的作动器支路1左视图; 图11为本发明的单组空气弹簧支路等轴测图; 图12为本发明的单组辅助支撑支路等轴测图; 图13为本发明的上平台组件仰视图; 图14为本发明的实时控制硬件系统的控制回路框图。 图中: 10000—下平台组件 20100—作动器支路1 20200—作动器支路2 20300—作动器支路3 20400—作动器支路4 20500—作动器支路5 20600—作动器支路6 20700—作动器支路7 20800—作动器支路8 20900—作动器支路9 21000—作动器支路10 21100—作动器支路11 21200—作动器支路12 30100—空气弹簧支路1 30200—空气弹簧支路2 30300—空气弹簧支路3 30400—空气弹簧支路4 30500—空气弹簧支路5 8 CN 111551329 A 说 明 书 5/10 页 30600—空气弹簧支路6 30700—空气弹簧支路7 30800—空气弹簧支路8 40100—辅助支撑支路1 40200—辅助支撑支路2 40300—辅助支撑支路3 40400—辅助支撑支路4 40500—辅助支撑支路5 40600—辅助支撑支路6 50000—上平台组件 10101—下平台 20101—作动器1 20201—作动器2 20301—作动器3 20401—作动器4 20501—作动器5 20601—作动器6 20701—作动器7 20801—作动器8 20901—作动器9 21001—作动器10 21101—作动器11 21201—作动器12 20102—下连接块1 20202—下连接块2 20302—下连接块3 20402—下连接块4 20502—下连接块5 20602—下连接块6 20702—下连接块7 20802—下连接块8 20902—下连接块9 21002—下连接块10 21102—下连接块11 21202—下连接块12 20103—转接板1 20203—转接板2 20303—转接板3 20403—转接板4 20503—转接板5 20603—转接板6 20703—转接板7 20803—转接板8 20903—转接板9 21003—转接板10 21103—转接板11 21203—转接板12 20104—球铰底座1 20204—球铰底座2 20304—球铰底座3 20404—球铰底座4 20504—球铰底座5 20604—球铰底座6 20704—球铰底座7 20804—球铰底座8 20904—球铰底座9 21004—球铰底座10 21104—球铰底座11 21204—球铰底座12 20105—球铰球头1 20205—球铰球头2 20305—球铰球头3 20405—球铰球头4 20505—球铰球头5 20605—球铰球头6 20705—球铰球头7 20805—球铰球头8 20905—球铰球头9 21005—球铰球头10 21105—球铰球头11 21205—球铰球头12 20106—球铰上连接件1 20206—球铰上连接件2 20306—球铰上连接件3 20406—球铰上连接件4 20506—球铰上连接件5 20606—球铰上连接件6 20706—球铰上连接件7 20806—球铰上连接件8 20906—球铰上连接件9 21006—球铰上连接件10 21106—球铰上连接件11 21206—球铰上连接件12 20107—中U形叉1 20207—中U形叉2 20307—中U形叉3 20407—中U形叉4 20507—中U形叉5 20607—中U形叉6 20707—中U形叉7 20807—中U形叉8 20907—中U形叉9 21007—中U形叉10 21107—中U形叉11 21207—中U形叉12 20108—上U形叉1 20208—上U形叉2 20308—上U形叉3 20408—上U形叉4 20508—上U形叉5 20608—上U形叉6 20708—上U形叉7 20808—上U形叉8 20908—上U形叉9 21008—上U形叉10 21108—上U形叉11 21208—上U形叉12 50101—上平台 50201—上铰链座1 50202—上铰链座2 50203—上铰链座3 50204—上铰链座4 50205—上铰链座5 9 CN 111551329 A 说 明 书 6/10 页 50206—上铰链座6 50301—中心传感器座 50302—侧面传感器座 50401—加速度传感器1 50402—加速度传感器2 50403—加速度传感器3 50404—加速度传感器4 50405—加速度传感器5 50406—加速度传感器6











