
技术摘要:
本发明涉及一种运动预报的方法,具体涉及的是一种基于ARMA模型修正的改进灰色Elman神经网络气垫船运动预报方法。本发明将获得的气垫船运动数据进行加权滑动平均法预处理,建立改进的灰色GM(1,1)预测模型,将灰色预测模型的残差序列利用基于信息熵改进的Elman神经网络进 全部
背景技术:
灰色预测就是根据少量、不完全的信息,对事情的结果进行预测的一种预测方法。 灰色预测模型不需要较多数据及有效信息,可用于近期、短期和中长期预测,但是其预测误 差较大,处理非线性系统的能力差。因此,在灰色预测模型的基础上,分别采用加权滑动平 均法和Elman神经网络解决上述两个问题。加权滑动平均法对原始数据进行了平滑处理,提 高了预测准确度。Elman神经网络具有强大的自学习、自组织能力,能够很好地跟踪非线性 系统波动。同时,其与灰色预测模型的结合也解决了神经网络需要大量训练数据的问题。 传统的Elman神经网络对输入数据的权值系数是相同的,这表示输入的每个数据 对输出结果的影响是一定的,所以为了提高预测精度需要建立基于信息熵的Elman神经网 络。然而灰色和Elman单一预测模型的预测精度都比较低,因此,需要提出一种新型组合控 制方法来提高预测精度。进一步考虑灰色Elman预测模型的一些预测值与实测值之间的相 对误差,选取ARMA模型对误差残值进行修正,设计了一种基于ARMA模型修正的改进灰色 Elman神经网络预测方法。 本发明选取气垫船为应用对象,将基于ARMA模型修正的改进灰色Elman神经网络 预测方法应用于气垫船的运动预报。气垫船是一种十分复杂的非线性系统,在气垫船运动 过程中,由于气垫船存在运动强耦合及外部海洋干扰的不确定性,导致气垫船的操纵性能 极差,所以设计一种能够对气垫船运动姿态进行预测的运动预报方法十分重要,能够提高 气垫船的运动安全性。
技术实现要素:
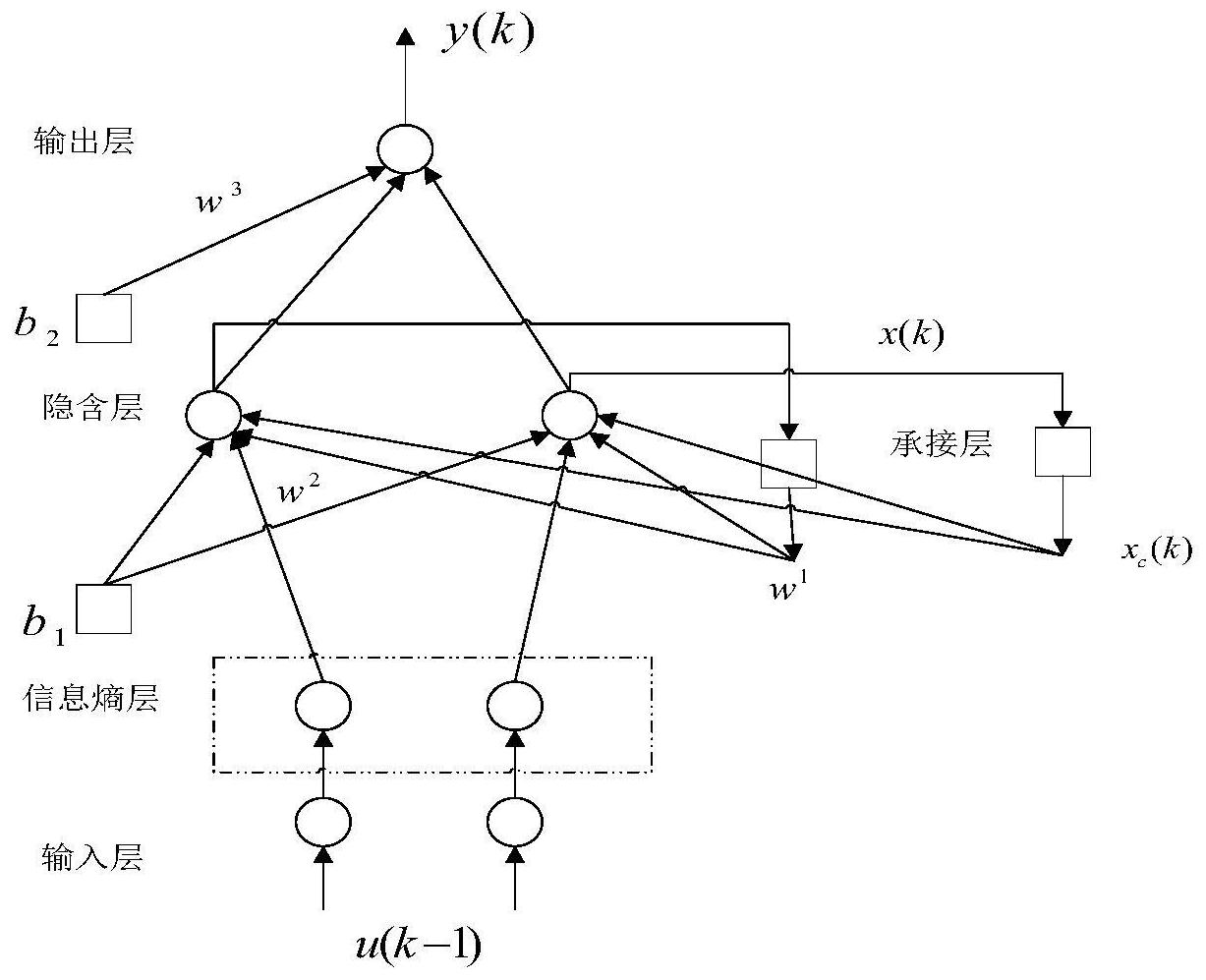
本发明的目的在于一种基于ARMA模型修正的改进灰色Elman神经网络气垫船运动 预报方法。 本发明的目的是这样实现的: 一种基于ARMA模型修正的改进灰色Elman神经网络气垫船运动预报方法,将获得 的气垫船运动数据进行加权滑动平均法预处理,建立改进的灰色GM(1,1)预测模型,将灰色 预测模型的残差序列利用基于信息熵改进的Elman神经网络进行训练,反复训练得到预测 误差序列与灰色预测值相加得到预测模型最终预测值;对于最终预测值采用ARMA模型修正 误差,提高组合预测模型的预测精度; (1)GM(1,1)预测模型: 对采集到的气垫船运动数据横倾角、纵倾角、回转角速度等进行累加变成递增序 列,采用加权滑动平均法对原始数据进行平滑处理,建立改进GM(1,1)灰色预报模型对处理 5 CN 111581832 A 说 明 书 2/7 页 后的实测数据进行预测得到预测值和残差序列; (2)训练改进Elman神经网络预测模型: 在Elman神经网络模型中加入信息熵加权层,使传统Elman神经网络模型变成五层 神经网络,变成基于信息熵的Elman神经网络模型,将GM(1,1)所得k组残差序列数据作为改 进Elman神经网络预测模型的输入向量,得到残差序列的输出值,训练改进Elman网络,进行 残差修订; (3)灰色Elman组合模型预测结果获取: 将改进的Elman模型对残差序列修订之后的预测值与灰色模型的预测结果相加即 可得到灰色Elman模型的最终预测结果; (4)ARMA模型修正预测结果: 对改进后的灰色Elman神经网络模型得气垫船运动数据的预测结果,建立ARMA模 型对残差进行修正,提高模型的预测精度。 训练改进Elman神经网络预测模型包括: (2.1)改进灰色GM(1,1)预测模型 将获得的原始序列进行累加获得新的单调递增序列X(1),建立GM(1,1)模型的微分 方程: p称发展系数或者是待发展灰数,q是内生控制灰数; 用最小二乘法求解参数p,q,将求解的参数带入到微分方程中即可得到最终灰色 预测模型公式: 对应的残差序列et为实际值与预测值之差,通过灰色预测模型可以得到灰色预测 值与残差序列; 在进行灰色预测之前采用加权滑动平均法对数据进行预处理,加权滑动平均法的 计算公式: 式中 为t时刻的权重,pt为t时刻的滤波结果,xt为观测值; 观测值权重均值为: 该值是小于等于1的,这会使得预测值小于等于真实值,所以需要对计算公式进行 修正: 改进后的灰色预测模型为: 6 CN 111581832 A 说 明 书 3/7 页 (2.2)改进Elman神经网络预测模型 Elman神经网络的表达式为: y(k)=g(w3x(k)) x(k)=f(w1xc(k) w2(u(k-1)) xc(k)=x(k-1) 式中,g(·)为输出神经元的传递函数; f(·)是中间层神经元传递函数; y(k)是k时刻下输出层神经元m维单元向量; x(k)是k时刻下隐含层神经元n维单元向量; u(k)是k时刻下输入层神经元r维单元向量; xc(k)为k时刻下承接层神经元的n维单元向量; w1∈Rn*n为承接层和隐含层之间连通权值; w2∈Rn*r是输入层与隐含层的连通权值; w3∈Rm*n是隐含层到输出层的连通权值; 对于传统的Elman神经网络,为了使每个输入数据对输出结果的影响程度不同,采 用信息熵加权对输入数据的权值进行计算建立信息熵加权的Elman神经网络;改进Elman神 经网络中每个数据概率是pi,则概率为: 每个数据拥有的信息熵为: Ei=-log2 e·pi ln pi i=1,2,...n, 加权系数wi为: 通过信息熵计算,相当于把传统Elman神经网络改成一个五层网络,即在输入层和 隐含层中加入信息熵加权层,改进后的Elman神经网络模型为: y(k)=g(w3x(k)) x(k)=f(w1x 2c(k) w (wi*u(k-1)) xc(k)=x(k-1) 将GM(1,1)模型的预测残差序列作为神经网络的输入,在改进的Elman神经网络中 进行训练,训练结束后对残差进行调整修正,将灰色模型的预测结果与改的Elman残差序列 修正值相加得到最终模型预测结果。 ARMA模型表达式为: yt=ξ1yt-1 ξ2yt-2 ··· ξpyt-p τt-λ1τt-1-λ2τt-2-···-λqτt-q 式中,(p,q)为自回归滑动平均模型的阶, ξ1,ξ2,...,ξp为自回归参数, λ1,λ2,...,λq为滑动平均参数, τt是模型待估参数; 7 CN 111581832 A 说 明 书 4/7 页 由灰色Elman神经网络模型的预测结果为yi,根据ARMA模型的误差预测值Ci'(1)对 预测值进行调整,最终修正预测方程为: 式中y *i 是最终修正预测值,C′i(k)为第k个ARMA模型误差预测值。 本发明包括以下有益效果: 1、本发明基于灰色模型和神经网络预测模型组合成一种改进灰色Elman预测模 型,采用加权滑动平均法对数据进行处理,减小原始数据的干扰影响,在传统Elman神经网 络模型的基础上加入信息熵加权算法,排除每个输入数据对输出结果有相同影响。该模型 结合两种单一模型的优点,可以对数量少、有效信息少的原始数据进行自主学习、自主预 测,能够极大提高预测精度。 2、本发明针对灰色Elman组合预测模型预测结果中存在一些误差较大的数据,加 入ARMA模型对预测结果进行修正,提高了预测精度。 附图说明 图1是本发明中改进的基于信息熵的Elman神经网络结构图 图2是本发明中预报流程图 图3是本发明中预报模型在气垫船系统中应用











