
技术摘要:
本发明公开了一种四轴工业码垛机器人的视觉系统,属于视觉系统设计领域。所述视觉系统为利用固定在待码放物品上方的摄像机,通过图像处理技术形成成像模型来实现对形状规则的小型包装盒进行坐标和姿态的识别,同时识别包装盒上附带的二维码信息,从而判断物品的类型; 全部
背景技术:
在工业生产流水线当中,码垛机器人一般处于生产流水线的最末端,主要作用是 对目标物体进行抓取和搬运,按照事先设定好的抓取位置和码放位置进行相应的动作,只 是简单的重复执行预先设定好的程序,完成既定的动作,这种工作方式较为单一和固定,局 限性较大,当生产线上的物体位置或种类发生变化时,传统的码垛机器人缺少必要的辨识 能力,不能根据物体的实际情况做出相应的动作调整,这对码垛机器人在工业上的应用造 成了很大限制。 随着计算机技术的高速发展,图像的处理和识别技术也得到了质的发展,进入21 世纪以来,图像处理技术在越来越多的领域得到广泛应用,图像处理技术也成为智能制造 发展的一个重要方向,随着技术的不断成熟,越来越多的企业和机构也投入大量的人力物 力到图像处理的研究和应用中来,在物体的辨识、目标的跟踪和物体的检测等都取得了不 错的成果。 相比于传统的码垛机器人来说,基于视觉的码垛机器人能够在不同的生产环境 下,通过机器人视觉系统进行图像采集、处理和分析,分辨出物体的类型和位置,对不同的 物体在码垛时进行快速、准确的定位和判断,从而准确的抓取物体并将其置于指定的位置。 本设计为了解决传统码垛机器人的弊端,将图像处理与码垛机械臂结合起来,使码垛机械 臂具备识别和定位功能,为实现工业生产制造自动化和智能化提出了解决方案、具有良好 的市场发展前景。
技术实现要素:
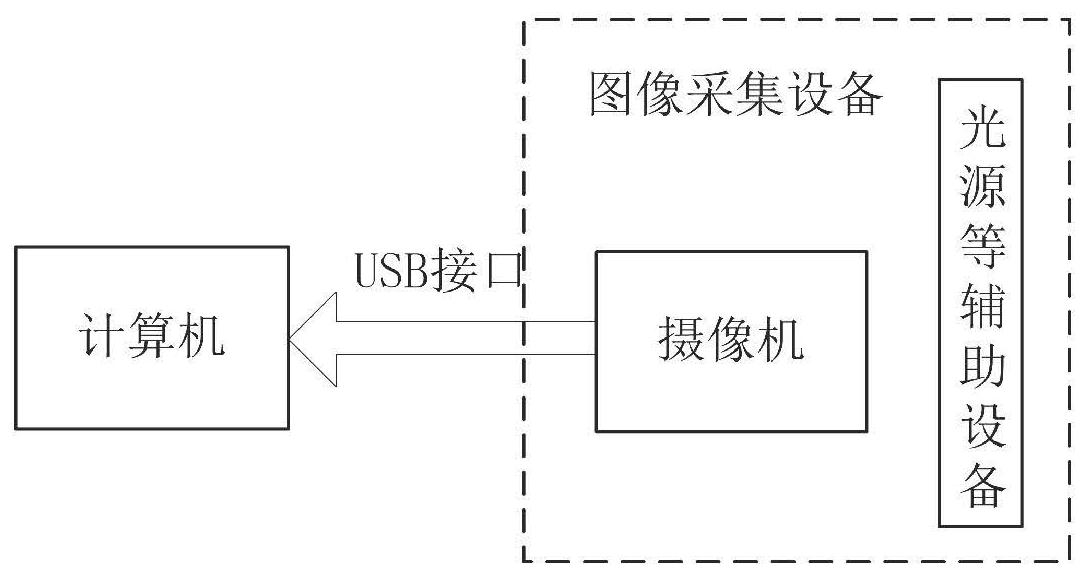
为了解决上述技术问题,本发明通过摄像头对包装盒的图像信息进行采集,在由 C#编写的视觉系统软件进行处理并计算出待抓取包装盒的匹配识别结果、坐标值以及包装 盒的偏转角度;能够引导机器人对其进行抓取,最后对抓取后的包装盒进行按要求分类码 垛。 本发明采用的技术方案如下: 一种四轴工业码垛机器人的视觉系统,为利用固定在待码放物品上方的摄像机, 通过图像处理技术形成成像模型来实现对形状规则的小型包装盒进行坐标和姿态的识别, 同时识别包装盒上附带的二维码信息,从而判断物品的类型;所述视觉系统包括以下步骤: 对摄像头采集到的信息进行图片灰度化、图像滤波、图像二值化、图像膨胀处理、获取二维 码边缘、二维码解码等步骤,通过这些步骤来判断物体种类、利用手眼标定将像素坐标转化 为物体的实际坐标、利用模板匹配确定物体的位姿角度。 进一步的,所述成像模型中包括世界坐标系、相机坐标系、图像坐标系和像素坐标 系,所述相机的成像过程的数学模型是目标点在这几个坐标系中转化而来。 4 CN 111604909 A 说 明 书 2/8 页 进一步的,所述视觉系统包括以下步骤: (1)图片灰度化 在条码定位过程中首先通过灰度化将摄像机采集到的彩色图片转变为灰度图片。 灰度化是指在RGB图像中,当三者的值相同时,则彩色表示一种灰度颜色,其值称为灰度值, 因此,灰度图像每个像素只需一个字节存放灰度值,灰度范围为0-255; (2)图像滤波 摄像机在取像时会受到周围环境的影响,从而产生噪音。这样的噪声会引起二维 码分割,解码错误。因此在灰度化后需要对灰度图片进行图像滤波处理。图像滤波的目的是 在尽量保留图像细节特征的条件下对目标图像的噪声进行抑制,是图像预处理中不可缺少 的操作,其处理效果的好坏将直接影响到后续图像处理和分析的有效性和可靠性。本次设 计采用高斯滤波对图像进行滤波处理。高斯滤波是一种线性平滑滤波。高斯滤波就是对整 幅图像进行加权平均的过程,每一个像素点的值,都由其本身与其8邻域内的其他像素值经 过加权平均后得到; (3)图像二值化 滤波后的灰度图减少了噪声干扰,但图片的灰度值仍然为0-255之间。此时需要对 图像进行二值化处理,利用点运算的阈值理论将采集到的图象变为二值图像,其效果是将 图像中深灰和浅灰的图案转换成只有黑或白两种颜色; (4)图像膨胀处理 二值化后的图片进行首先进行膨胀处理。膨胀就是求局部最大值的操作。从数学 角度解释图像的膨胀操作是将图像与核进行卷积。即计算核覆盖的区域的像素点的最大 值,并把这个最大值赋值给参考点指定的像素。这样就会使图像中的高亮区域逐渐增长; (5)获取二维码边缘 对膨胀后的区域进行边缘检测操作,边缘检测后条码区域的边界不是很完整,所 以需要进一步的修正边界,然后分割出一个完整的条码区域。首先采用区域增长的方法对 符号进行分割,以此修正条码边界。其基本思想是从符号内的一个小区域开始,通过区域增 长来修正条码边界,把符号内的所有点都包括在这个边界内。然后通过凸壳计算准确分割 出整个符号,之后区域增长和凸壳计算交替进行重复四次,最终获得二维码的轮廓; (6)二维码解码 对于二维码的解码首先进行网格采样,对网格每一个交点上的图像像素取样,并 根据阈值确定是深色块还是浅色块。构造一个位图,用二进制的“1”表示深色像素,“0”表示 浅色像素,从而得到条码的原始二进制序列值,然后对这些数据进行纠错和译码,最后根据 条码的逻辑编码规则把这些原始的数据位转换成数据码。 进一步的,二维码坐标需要通过手眼标定实现坐标转换得到待抓取物体相对于机 器手坐标系的真正坐标值,所述手眼标定为九点标定法标定像素坐标与机器手坐标的转换 关系;所述摄像机为无几遍摄像机,摄像机获得的像素坐标值用于手眼标定,即在像素坐标 下获取工作平面上九个点的坐标,同时机器手末端遍历这9个点得到在机器手坐标系中的 坐标,同一点的两个坐标相互对应,最终求得像素坐标与机器手坐标的转换关系。 进一步的,摄像机在采集物体的二维码信息和物体坐标后,采用基于轮廓的形状 匹配方法检测被抓取物体上标志位的信息,从而获得被抓取物体的角度;基于相关性的模 5 CN 111604909 A 说 明 书 3/8 页 板匹配其大概过程为:图像采集,图像预处理,创建模板,匹配模板和清除模板,基于相关性 的模板匹配采用NormalizedCrossCorrelation(NCC)算法,可以有效降低光照对图像比较 结果的影响,步骤为:预计算模板图像和目标图像的积分图;根据输入的窗口半径大小使用 积分图完成NCC计算;根据阈值得到匹配或者不匹配区域;输出结果。 进一步的,图像采集采用工业800万快速自动对焦USB免驱动摄像头,像素尺寸为 3.0×3.0μm,镜头长度为6mm,分辨率1280×720,帧数率为30桢/秒,摄像头通过USB电缆与 计算机相连。 本发明的有益效果: 本发明的优点和有益效果是将机器视觉与四轴工业码垛机器人结合起来,使之具 有识别功能,对于保证产品质量、降低劳动成本、优化作业布局、提高生产效率、增长经济效 益、实现生产的自动化等方面具有十分重要的意义。 附图说明 图1为本发明的视觉装置硬件结构图; 图2为本发明像素坐标系和图像坐标系位置示意图; 图3为本发明的相机坐标系与图像坐标系模型图; 图4为本发明的摄像机坐标系与世界坐标系模型图; 图5为本发明的坐标轴旋转示意图; 图6为本发明的二维码信息获取流程图; 图7为本发明的手眼标定流程图; 图8为本发明的模板流程图。











