
技术摘要:
本发明公开一种基于视频技术的公路隧道停车检测方法,包括:采集公路隧道内的视频数据;判断视频图像中车辆是否存在和是否运动;分车道进行车辆空间位置的跟踪,获得车辆行驶在车道上的轨迹点,将车辆在图像中相邻连续帧的位置连线形成轨迹;采用k‑mean聚集算法判断轨 全部
背景技术:
据相关部门数据统计,截止2017年低,全国公路隧道共有162291处、1528.51万米, 其中特长隧道902座,里程401.32万米;长隧道3841座,里程659.93万米。由于公路隧道的不 断增多,长度为1km~3km的长隧道里交通事故频发,特别是在长度超过3km~10km的特长隧 道出现后,隧道路段已经成为了交通事故的多发地点。在正常情况下,隧道内是不允许换 道、超车和停车的,如果车辆在隧道内违章停车,则可以判断此处发生了异常的交通事件, 若不及时处理,疏导交通,极易发生二次事故,所以实时检测隧道内的停车事件是避免隧道 内碰撞事故的发生,确保隧道行车安全的关键所在。传统的停车检测方法一般是通过车辆 的速度和加速度变化实现的,在高速公路上此方法的效果显著,然而此方法不太适合长大 公路隧道,长大公路隧道单向只有二条车道,此方法只能检测车辆的违章停车,不能判断车 辆停在哪条车道上,对后续救援不能提供具体的位置信息。
技术实现要素:
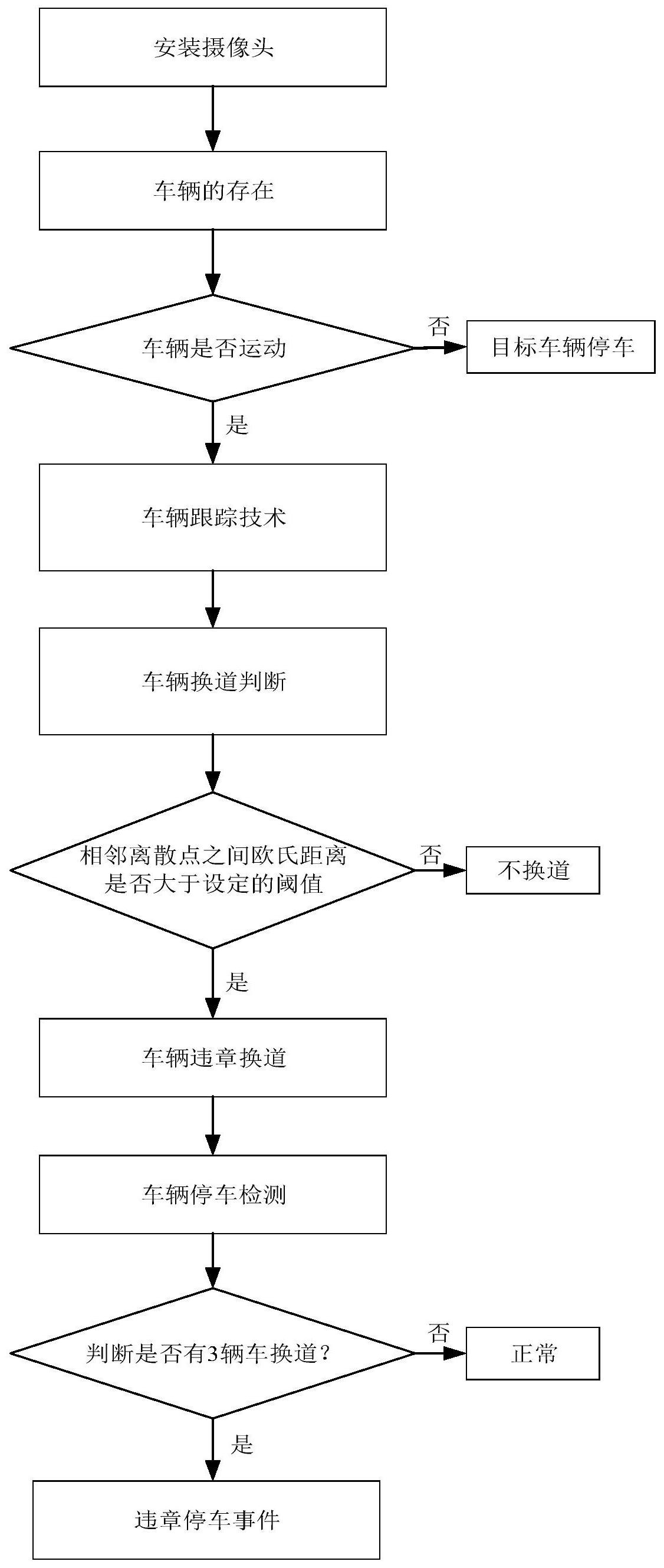
发明目的:本发明提供一种基于视频技术的公路隧道停车检测方法,通过在隧道 中安装摄像机获取视频图像,对视频图像进行图像处理与分析,判断车辆是否违章换道或 停车;用于解决长度超过1km的长大公路隧道中的车辆碰撞问题。 技术方案:为实现本发明的目的,本发明所采用的技术方案是:一种基于视频技术 的公路隧道停车检测方法,包括以下步骤: 步骤一、在公路隧道内安装摄像头,采集隧道内行驶车辆的视频图像; 步骤二、通过视频图像判断各车道上是否存在车辆,若存在车辆,判断各车道上的 车辆是否运动;若车辆在运动,进入步骤三,若车辆不运动,则检测到车辆停车; 步骤三、对各车道的车辆位置进行跟踪,车辆在每帧图像中的位置作为其轨迹点, 将相邻连续帧中车辆位置连线得到轨迹,各车道上所有车辆轨迹形成轨迹集; 步骤四、采用k-mean聚集算法判断轨迹集中是否存在异常轨迹,若存在异常轨迹, 则该轨迹对应的车辆在行驶过程中发生车道改变;所述异常轨迹是指非直行轨迹;公路隧 道内车辆的正常行驶状态是指直行,异常行驶状态是指除直行以外的左转或右转; 步骤五、统计一段时间内在同一位置进行换道的车辆数量,若所述的车辆数量大 于或等于a,则判定该位置处有停车事件发生。时间段的长短根据交通量的大小而定。 进一步的,所述步骤二中,检测是否存在车辆的方法如下: 采用形态学边缘检测算法提取出图像中车辆的边缘和运动信息生成边缘图像,将 生成的边缘图像作为检测区域R,通过边缘图像中像素点的灰度密度判断车辆是否存在: 检测区域R内满足阈值条件的像素点集合M为: 5 CN 111597905 A 说 明 书 2/7 页 M={(x,y)∈R|E(x,y)≥Gt} 其中E(x,y)为边缘灰度图像中像素点(x,y)的灰度值,Gt为设定的灰度阈值; 检测区域R中的边缘灰度密度de(R)为: 其中S(M)是集合M中像素的个数,S(R)是检测区域R中所有像素的个数; 检测区域R内车辆是否存在的判断准则为: 其中Vp(R)表示车辆是否存在,De为边缘灰度密度阈值。 进一步的,所述步骤二中,检测车辆是否运动的方法如下: 采用相邻三帧差法提取出图像中目标车辆的边缘和运动信息生成帧差图像,将生 成的帧差图像设为检测区域R,通过帧差图像中像素点的灰度密度判断目标车辆是否运动: 检测区域R内满足阈值条件的像素点的集合N为: N={(x,y)∈R||Ft(x,y)-Ft-1(x,y)|≥Gt∨|Ft-1(x,y)-Ft-2(x,y)|≥Gt} 其中(x,y)为帧差灰度图像中的像素点,Ft、Ft-1和Ft-2分别为相邻三帧灰度图像,Gt 为设定的灰度阈值; 检测区域R中的帧差灰度密度df(R)为: 其中S(N)是集合N中像素的个数,S(R)是检测区域R中所有像素的个数; 检测区域R内车辆是否运动的判断准则为: 其中Vm(R)表示车辆是否运动,Df为帧差灰度密度阈值。 进一步的,所述步骤三中,对各车道的车辆位置进行跟踪,车辆在每帧图像中的位 置作为其轨迹点,将相邻连续帧中车辆位置连线得到轨迹,具体如下: (1)根据采集的视频图像进行公路隧道内的车道线检测,确定隧道内各个车道; (2)对各个车道上车辆的图像信息进行分析,将车辆几何中心所处的车道作为车 辆运行的车道;将车辆通过连续两帧视频图像移动的方向作为车辆的运动方向;记录视频 图像中各车辆的面积s、长度l、宽度w; (3)在连续两帧图像中,记录第一帧图像中选定的目标车辆后边界的中点坐标为 L1(l1,l2),几何中心坐标为M1(m1,m2),前边界的中点坐标为N1(n1,n2);记录第二帧图像中任 意一辆车后边界的中点坐标为L2(l′1,l′2),几何中心坐标为M2(m′1,m′2),前边界的中点坐 标为N2(n′1,n′2); (4)令像素点纵坐标方向为道路纵向,在第一帧图像M1点的像素纵坐标m2向车辆行 驶方向移动h个像素点距离区域内,判断第二帧图像M2点的像素纵坐标m′2是否满足m′2≥m2 且m′2≤m2 h;若满足,进入步骤(5),否则,进入步骤(6); 6 CN 111597905 A 说 明 书 3/7 页 (5)计算两帧图像中M1,M2点对应的车辆之间的相似度,判断M1,M2点对应的车辆是 否为同一辆车;相似度计算公式如下所示: γ=1-0.2×s-0.4×l-0.4×w 其中γ表示相似度,s表示车辆面积,l表示车辆长度,w表示车辆宽度; 若M1 ,M2点对应的车辆的γ值的差值在设定的误差阈值范围内,M1 ,M2点对应的车 辆为同一辆,进入步骤(7);否则,对应的车辆不是同一辆,进入步骤(6); (6)令h=h j,j表示j个像素点,重复步骤(4)~步骤(6),遍历第二帧图像中各个 车辆几何中心点的坐标位置,直到m2











