
技术摘要:
本发明提供一种具有自适应控制功能的种植手机清洗系统及方法,能够通过全自动方式减轻操作负担。该系统包括相通信的主控制器系统和马达控制器系统;所述主控制器系统中,主控制器接受用户的控制指令并控制显示器显示清洗过程和结果;所述主控制器系统的主控制器与所述 全部
背景技术:
牙科医疗器械领域中,牙科手机清洗尤其是种植手机的清洗是手术完成后非常必 要的动作,由于种植手机是慢速手机,在治疗过程中更容易藏入碎骨、血污等杂质,所以需 要在术后及时清洗。 目前清洗的过程都是手动操作,过程如图1所示。首先将牙科种植机机头置于水杯 并使水面没过机头,踩下脚踏开关开始正转清洗,计时一定时间(例如十秒钟),操作牙科种 植机切换为反转模式,踩下脚踏开关开始反转清洗,计时一定时间(例如十秒钟)直至结束。 由此可见,手动操作的清洗十分繁琐,并不便捷。 此外,对于阻塞严重的种植手机目前也无法自动调整清洗强度,需要人工干预。
技术实现要素:
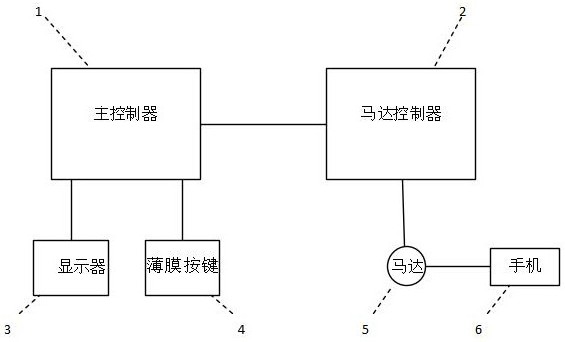
针对上述问题,本发明的目的在于提供一种具有自适应控制功能的种植手机清洗 系统及方法,能够通过全自动方式减轻操作负担。 一方面,本发明提供一种具有自适应控制功能的种植手机清洗系统,包括相通信 的主控制器系统和马达控制器系统;所述主控制器系统中,主控制器接受用户的控制指令 并控制显示器显示清洗过程和结果;所述主控制器系统的主控制器与所述马达控制器系统 的马达控制器通讯来相互接收信息和发送指令;所述马达控制器系统中,所述马达控制器 根据所述主控制器发来的命令来控制马达,并监测所述马达的状态反馈给所述主控制器。 藉此,本发明不仅可以通过全自动方式减轻操作负担,还可通过自适应方式提高 清洗效果。 较佳地,所述马达控制器根据所述主控制器发来的命令来控制所述马达正转,同 时监测所述马达的实际扭矩。借此可实时监控马达的运行。 较佳地,所述马达控制器控制所述马达正转;当所述马达的实际扭矩不大于设定 的空载临界扭矩值,所述马达正转直至持续超过第一规定时间,所述马达控制器使所述马 达开始反转;当总持续时间超过设定持续时间,则结束旋转。借此可有效处理手机中碎骨较 少或者没有的情况。 较佳地,所述马达控制器控制所述马达正转;当所述马达的实际扭矩大于设定的 空载临界扭矩值,所述马达控制器使所述马达开始反转;反转时当所述马达的实际扭矩值 仍然大于所述空载临界扭矩值,如果马达旋转持续第二规定时间后实际扭矩值仍然大于所 述空载临界扭矩值,则加大转速,增大扭矩上限值,并让马达正转;重复以上过程,直到总持 续时间超过设定持续时间,则结束旋转。借此可有效处理手机中碎骨较多的情况。 较佳地,所述主控制器系统中,所述主控制器通过薄膜按键来接受用户的控制指 3 CN 111568590 A 说 明 书 2/4 页 令。借此,用户操作方便。 另一方面,本发明还提供一种具有自适应控制功能的种植手机清洗方法,先使马 达正转;当所述马达的实际扭矩不大于设定的空载临界扭矩值,所述马达正转直至持续超 过第一规定时间,使所述马达开始反转;当总持续时间超过设定持续时间,则结束旋转;当 所述马达的实际扭矩大于设定的空载临界扭矩值,所述马达控制器使所述马达开始反转; 反转时当所述马达的实际扭矩值仍然大于所述空载临界扭矩值,如果马达旋转持续第二规 定时间后实际扭矩值仍然大于所述空载临界扭矩值,则加大转速,增大扭矩上限值,并让马 达正转;重复以上步骤,直到总持续时间超过设定持续时间,则结束旋转。 附图说明 图1示出以往手机清洗操作步骤; 图2示出本发明一实施形态的具有自适应控制功能的种植手机清洗系统结构框图; 图3示出本发明一实施形态的具有自适应控制功能的种植手机清洗系统的电路控制结 构框图; 图4示出本发明一实施形态的具有自适应控制功能的种植手机清洗系统所执行的清洗 方法的流程图; 附图标记: 1.主控制器 2.马达控制器 3.显示器 4.薄膜按键 5.马达 6.手机。











