
技术摘要:
本发明涉及一种步行式挖掘机自行上下运输车控制方法。具体说,是用来实现步行式挖掘机自行上、下运输车的控制方法。该方法包括依次包括设置传感器和控制器、建立步式挖掘机空间数学模型、由控制器中的微处理器对步行式挖掘机与运输车距离调整进行规划运算、进行上车步 全部
背景技术:
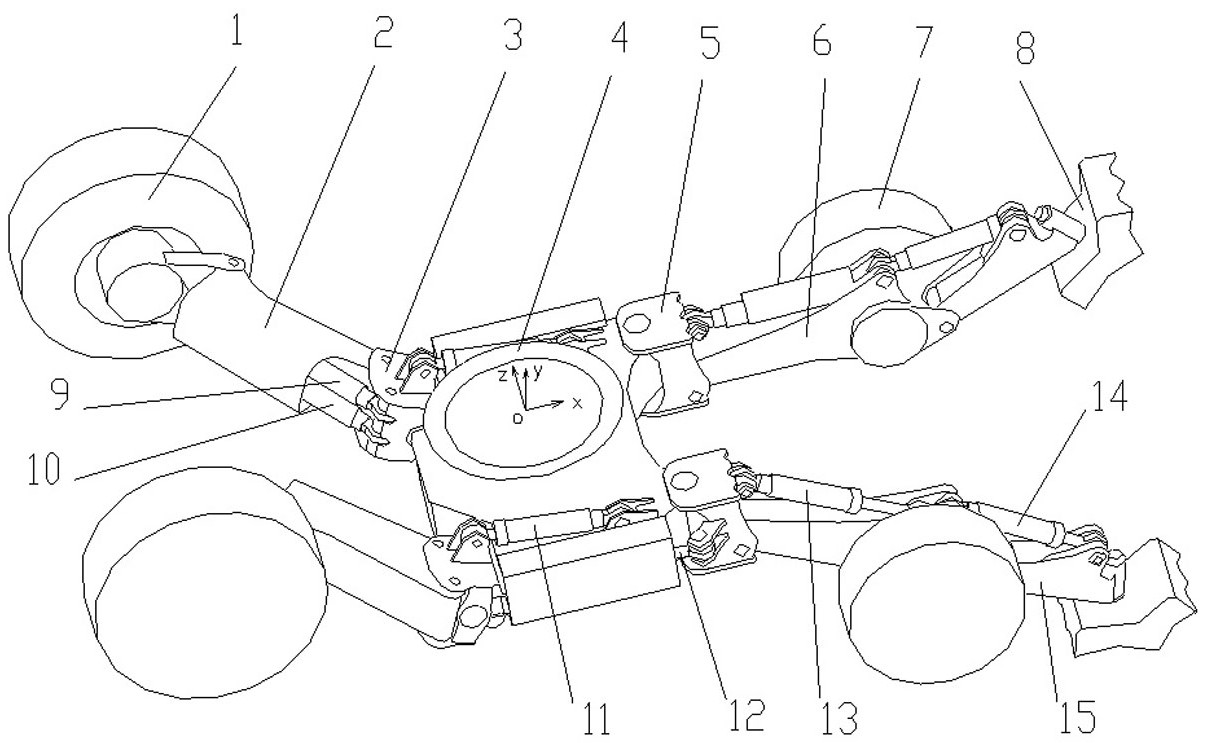
步行式挖掘机是一种适合于高原和山地作业的特种工程机械,其主要由步行式底 盘和工作装置组成。 步行式底盘用于挖掘机的步行和行驶,如图1所示,其结构主要由后轮1、后腿2、后 关节3、底座4、前关节5、前腿6、前轮7、前臂15和前爪8组成。前后轮采用液压马达驱动。后轮 转向采用后轮转向油缸9驱动,后腿摆动与升降分别采用后腿摆动油缸 10和后腿升降油缸 11驱动,前腿摆动与升降分别采用前腿摆动油缸12和前腿升降油缸 13驱动,前臂升降采用 前臂升降油缸14驱动。步行式底盘为左右对称结构。 步行式底盘具有13个自由度,包括左、右后腿上下、左右摆动4个自由度,左、右前 腿上下、左右摆动4个自由度,以及左右前腿中前臂升降2个自由度,前轮和后轮 (左右轮液 压油路串连)驱动各1个自由度,后轮转向(左右轮液压油路串连)1个自由度。步行式底盘一 般采用前腿与后轮配合转向,可以实现直线行驶和蟹行功能。 工作装置用于挖掘作业和辅助步行式底盘行走,如图2所示,其结构主要由安装在 步行式底盘上的回转平台23、动臂22、斗杆20、伸缩臂18和铲斗16组成。其中回转平台采用 液压马达驱动(回转平台内部);动臂、斗杆、伸缩臂和挖斗分别由动臂油缸 25、斗杆油缸 21、伸缩臂油缸19和铲斗油缸17驱动。 工作装置具有5个自由度,包括动臂1个摆动自由度、斗杆1个摆动自由度、伸缩臂1 个平移自由度、铲斗1个摆动自由度和回转平台1个回转自由度。 为了便于表达,将步行式挖掘机结构图转化为运动简图,其行驶状态的主视图和 俯视图分别如图3、图4所示。 步行式底盘是一种由多组关节、腿、轮连接而成的多自由度结构系统,其4条步行 腿与具有伸缩功能的工作装置配合起来,相当于一个具有5条腿的步行行走机构,使得步行 式挖掘机具有越障、爬坡、涉水、跨越壕沟等特殊功能,可在复杂地形环境下进行步行和作 业。由于步行式挖掘机的控制自由度多,其步行时操作控制复杂,对驾驶员操作技能要求 高。 步行式挖掘机行驶速度较低,长距离机动时一般采用专用车辆运输。其中的运输 车车厢空间狭窄,仅能容纳步行式挖掘机运输。因此,步行式挖掘机上、下运输车时,需要对 其进行准确定位,对驾驶员的要求非常高。操作过程中稍有疏忽,就易造成运输车损伤和步 行式挖掘机倾翻等安全事故。
技术实现要素:
本发明要解决的问题是提供一种步行式挖掘机自行上下运输车控制方法。采用这 5 CN 111576511 A 说 明 书 2/8 页 种控制方法,可避免运输车损伤和步行式挖掘机倾翻等安全事故的发生。 本发明要解决的上述问题有以下技术方案实现: 本发明的步行式挖掘机自行上下运输车控制方法特点是依次包括以下步骤: (1) .设置传感器和控制器 a.在步行式挖掘机底盘的后轮转向油缸、后腿摆动油缸、后腿升降油缸、前腿摆动 油缸、前腿升降油缸和前臂升降油缸上均设置一个用于测量它们的活塞杆行程和位置的第 一位移传感器,在两个后腿升降油缸和两个前腿升降油缸的油路中均设置一个用于测量步 行腿受压状态的第一压力传感器;所述第一位移传感器和第一压力传感器均借助导线与控 制器相连。 b.在工作装置的动臂油缸、斗杆油缸、伸缩臂油缸和铲斗油缸中均设置一个用于 测量其活塞杆行程和位置的第二位移传感器,在铲斗油缸的油路中设置用于测量工作装置 受力状态的第二压力传感器。所述第二位移传感器和第二压力传感器均借助导线与控制器 相连。 c.在回转平台上设置一个用于测量其相对于初始位置旋转角度的转角传感器,在 回转平台中心的纵向和横向均设置一个用于测量其俯仰角和侧倾角的水平角度传感器。所 述转角传感器和水平角度传感器均借助导线与控制器相连。 d .在底座4的后侧中心设置一个测距传感器S1,该测距传感器借助导线与控制器 相连。以运输车前挡板的上边左端R1和上边右端R2及运输车平台的后边左端R3和后边右端 R4均作为测距参考点,通过测量测距参考点与测距传感器S1间的距离来获得步行式挖掘机 相对于测距参考点的位置和姿态。 (2) .建立步式挖掘机空间数学模型 由控制器中的微处理器建立并计算步行式挖掘机数学模型,识别运输车空间位置 及实现步行式挖掘机上下运输车步态控制。 (3) .由控制器中的微处理器对步行式挖掘机与运输车距离调整进行规划运算 先使步行式挖掘机的纵向中心平面xoz与运输车平台的纵向中心平面x1o1z1相重 合,其中,上车时步行式挖掘机的后轮朝向运输车方向; 再识别运输车平台的相对位置; 以运输车平台的前挡板上边中心点为A1、运输车平台的后边中心点为A2,根据底 座的后侧中心上的测距传感器S1到运输车平台前挡板的上边左端R1的距离和运输车平台 的后边左端R3的距离,已知LR1R2、L R3R4值,得到运输车前挡板的上边中心点A1、运输车平台 的后边中心点A2相对于底座4后侧中心的测距传感器S1的距离分别为: 依据 可得到运输车前挡板和运输车平台后边间的距离。 然后,调整步行式挖掘机与运输车平台的相对位置。判断LS1A2和设定的可上车距 离L 的关系:若LS1A2>L,则步行式挖掘机向运输车方向移动的距离为LS1A2-L。若LS1A2=L,则 步行式挖掘机保持不动。若LS1A2<L,则步行式挖掘机向运输车反方向移动的距离为L- 6 CN 111576511 A 说 明 书 3/8 页 LS1A2。 依据步行式挖掘机的底座4后侧中心的测距传感器S1,识别步行式挖掘机与运输 车的相对位置。依据设定的可上车距离L,驱动前轮和后轮来对步行式挖掘机与运输车之间 的位置进行调整。 (4) .进行上车步态规划运算 (5) .进行下车步态规划运算。 其中: 所述步行式挖掘机空间数学模型包括: (1)利用机器人建模理论,以底座回转中心与其回转支承上平面交点为坐标原点 o,以过坐标原点o的步行式挖掘机的行驶方向为x轴,且方向向前;以过坐标原点o、垂直于 回转支承上平面为z轴,且方向向上;以过坐标原点o、与x轴和z轴相互垂直的轴为 y轴,且 方向向左,建立o-xyz基坐标系;同时,建立挖掘机的左前腿、右前腿、左后腿、右后腿和工作 装置的铲斗、伸缩臂、斗杆、动臂的参考坐标系,利用步行挖掘机的结构参数和布置在其各 个执行元件驱动油缸上的第一位移传感器、第二位移传感器和水平角度传感器,获得各运 动部件的位置状态参数,确定各运动部件的运动状态;再利用机器人空间坐标变换理论,建 立步行式挖掘机的三维空间数学模型。 (2)利用第一压力传感器和第二压力传感器,获得步行式挖掘机的触觉信息,以便 感知左前腿、右前腿、左后腿、右后腿和工作装置与地面、运输车或障碍物的接触情况。 (3)利用所述三维空间数学模型和触觉信息,确定运动中的步行式挖掘机任意点 的空间位置并对其姿态进行判别。 (4)利用所述三维空间数学模型,对步行式挖掘机的作业对象、障碍物等进行空间 参数测量,并判断作业对象和障碍物与步行式挖掘机的相对空间位置。 (5)利用所述三维空间数学模型、回转平台上的水平角度传感器测量的参数和第 一压力传感器,对步行式挖掘机所处的地形情况进行触觉探测,并确定步行式挖掘机的重 心位置参数。 所述上车规划运算包括: (1)进行后轮上车与姿态调整 收缩斗杆,伸长动臂油缸,抬升工作装置,并伸长伸缩臂油缸,使铲斗位于运输车 平台后边之前的50~100cm正上方。然后,收缩动臂油缸,使铲斗的斗齿置于运输车平台上。 再收缩前臂升降油缸至最短,使前爪处于最高状态。 收缩动臂油缸和伸缩臂油缸,并驱动前轮使步行式挖掘机向运输车方向移动,使 步行挖掘机的后轮抬起至运输车平台之上。 调整后腿摆动油缸,使后腿向内合拢至最小状态。 进一步收缩动臂油缸、伸长斗杆油缸的同时,驱动前轮使步行式挖掘机继续向运 输车方向移动,直至使后轮位于运输车后侧上方。继续收缩伸缩油缸,使后轮落到运输车平 台后边之前的50~100cm处,从而实现了后轮上车。 (2)进行前轮上车与姿态调整: 先使步行式挖掘机的后轮位于运输车平台上,在伸长动臂油缸使铲斗向上抬起的 同时,收缩斗杆油缸使斗杆也向上抬起。驱动回转平台的液压马达旋转180度,使工作装置 7 CN 111576511 A 说 明 书 4/8 页 置于步行挖掘机的正前方。伸长斗杆油缸至最长位置,收缩动臂油缸,使铲斗的斗底置于地 面上。 再依次收缩斗杆油缸、伸长动臂油缸,驱动后轮,使步行式挖掘机的前轮抬起并后 移。 依据测试距离LS1A1和步行式挖掘机的数学模型,继续收缩斗杆油缸,并伸长伸缩 臂油缸,使步行式挖掘机向运输车前挡板方向移动,直至使后轮到达运输车平台前挡板跟 前。 收缩伸缩臂油缸,使步行式挖掘机前轮落在运输车平台的同时,收缩两个前腿升 降油缸和两个后腿升降油缸,使步行式挖掘机的底座也置于运输车平台上。伸长铲斗油缸 到最长处,收缩伸缩臂油缸至最短位置,伸长斗杆油缸到最长处,收缩动臂油缸,降低工作 装置高度,使铲斗的斗底置于运输车平台上,从而实现了前轮上车。 (5)进行下车步态规划运算。 所述下车规划运算包括: (1)姿态调整与前轮着地 a .同时伸长两个前腿升降油缸、两个后腿升降油缸,使步行式挖掘机的后腿和前 腿与运输车平台的上表面保持平行,底座与运输车平台的上表面也保持平行。 b.依次伸长动臂油缸至其行程的一半处,伸长伸缩臂油缸至最长位置,缩短斗杆 油缸和铲斗油缸至最短位置,使工作装置向运输车平台后方伸出。 c.收缩动臂油缸,使铲斗的斗齿置于地面上。进一步收缩动臂油缸,使前轮脱离运 输车平台。 d.驱动后轮,并依次收缩伸缩臂油缸、伸长斗杆油缸和铲斗油缸,使步行式挖掘机 向运输车的后方移动,直至使后轮运动至运输车平台的后边缘。然后,收缩动臂油缸,使前 轮着地,完成了前轮下车过程。 (2)姿态调整与后轮着地 a .伸长动臂油缸,收缩斗杆油缸,使斗杆向上抬起。然后,驱动回转平台的液压马 达旋转180度,使工作装置置于步行式挖掘机的正后方。再伸长斗杆油缸,收缩动臂油缸,使 铲斗的斗齿置于运输车平台后边之前的50~100cm处。 b.依次伸长伸缩臂油缸、斗杆油缸和动臂油缸,驱动前轮,使步行式挖掘机向前移 动并使后轮距运输车平台后边50~100cm处。再调整后腿摆动油缸,使后腿向外伸展并调整 至行驶状态。 c.进一步伸长动臂油缸,使后轮着地。同时,缩短伸缩臂油缸,使铲斗脱离运输车 平台;驱动回转平台的液压马达旋转180度,使工作装置置于步行式挖掘机的正前方。然后, 调整工作装置的动臂油缸、斗杆油缸、伸缩臂油缸和铲斗油缸,使工作装置处于行驶状态, 完成了下车过程。 由以上方案可以看出,由于本发明的步行式挖掘机自行上下运输车控制方法包括 依次包括设置传感器和控制器、建立步式挖掘机空间数学模型、由控制器中的微处理器对 步行式挖掘机与运输车距离调整进行规划运算、进行上车步态规划运算和进行下车步态规 划运算等步骤。当控制器中的微处理器获得上车或下车指令时,由依据步行式挖掘机传感 器获得的信息和步行式挖掘机的空间数学模型,确定步行式挖掘机的初始状态。然后,由控 8 CN 111576511 A 说 明 书 5/8 页 制器中的微处理器依据上(或下)车步态规划算法,求解第一个序列控制指令,通过控制器、 电液控制阀组,控制步行式挖掘机的执行元件(指步行腿、工作装置上的各个液压驱动油 缸、驱动轮液压马达、回转平台液压驱动马达)动作。再由执行元件及步行式挖掘机上的第 一位移传感器、第二位移传感器、第一压力传感器、第二压力传感器、测距传感器、转角传感 器、水平角度传感器获得状态和位置信息,并反馈给控制器的微处理器中的步态规划算法 模块,依据步态算法计算下一步步态指令。如此反复,实现步行式挖掘机自行上下运输车过 程。与











