
技术摘要:
本发明公开了一种航班空中盘旋状态判断方法,从飞机起飞开始直至飞机降落时执行下述步骤:获取指定时间段内的全部ADS‑B数据;计算航班在当前指定时段内最大盘旋圈数;计算航班从起飞开始最大盘旋圈数;飞机落地时得到全航程盘旋状态以及最大盘旋圈数。本发明的方法可 全部
背景技术:
随着经济的发展,民用航空工业在我国国民经济中的作用日趋重要,民航业面向 旅客提供的信息和服务也不断完善,旅客出行更加方便快捷。通过对ADS-B(广播式自动相 关监视)数据的深度挖掘和使用,有助于准确及时地向旅客提供与飞机状态相关的信息,例 如飞机的位置、高度、速度、是否盘旋以及处于滑行起飞巡航还是下降等等,进而提升旅客 对服务细节的感知度。 盘旋是飞机在飞行过程中经常发生的一种现象。如果我们通过肉眼观察飞机的轨 迹曲线很容易辨别飞机是否有盘旋现象,但若想通过算法和数据,实现准确及时地识别却 具有一定地挑战性。总体而言,其难点主要体现在以下几个方面:盘旋的时间和地点不固 定;盘旋的形态各异,难以穷举;盘旋圈数和盘旋圈大小都不一,并且盘旋可以分为正向盘 旋和反向盘旋。现有的盘旋识别方法一般都是首先识别航班的轨迹曲线形状,然后通过轨 迹的形状判别是否有盘旋现象。该方法假设盘旋与一定的轨迹形状相匹配的,但是航班轨 迹形状的识别和判断本身就具有难度,一般只能做到少量规则型的形状识别,而对于非规 则型的形状难以识别,盘旋所对应的轨迹形态多,难以穷举等因素导致现有识别方法对于 盘旋现象的识别率较低,同时现有方法也无法做到区分正向盘旋和反向盘旋,以及做到盘 旋圈数的识别。
技术实现要素:
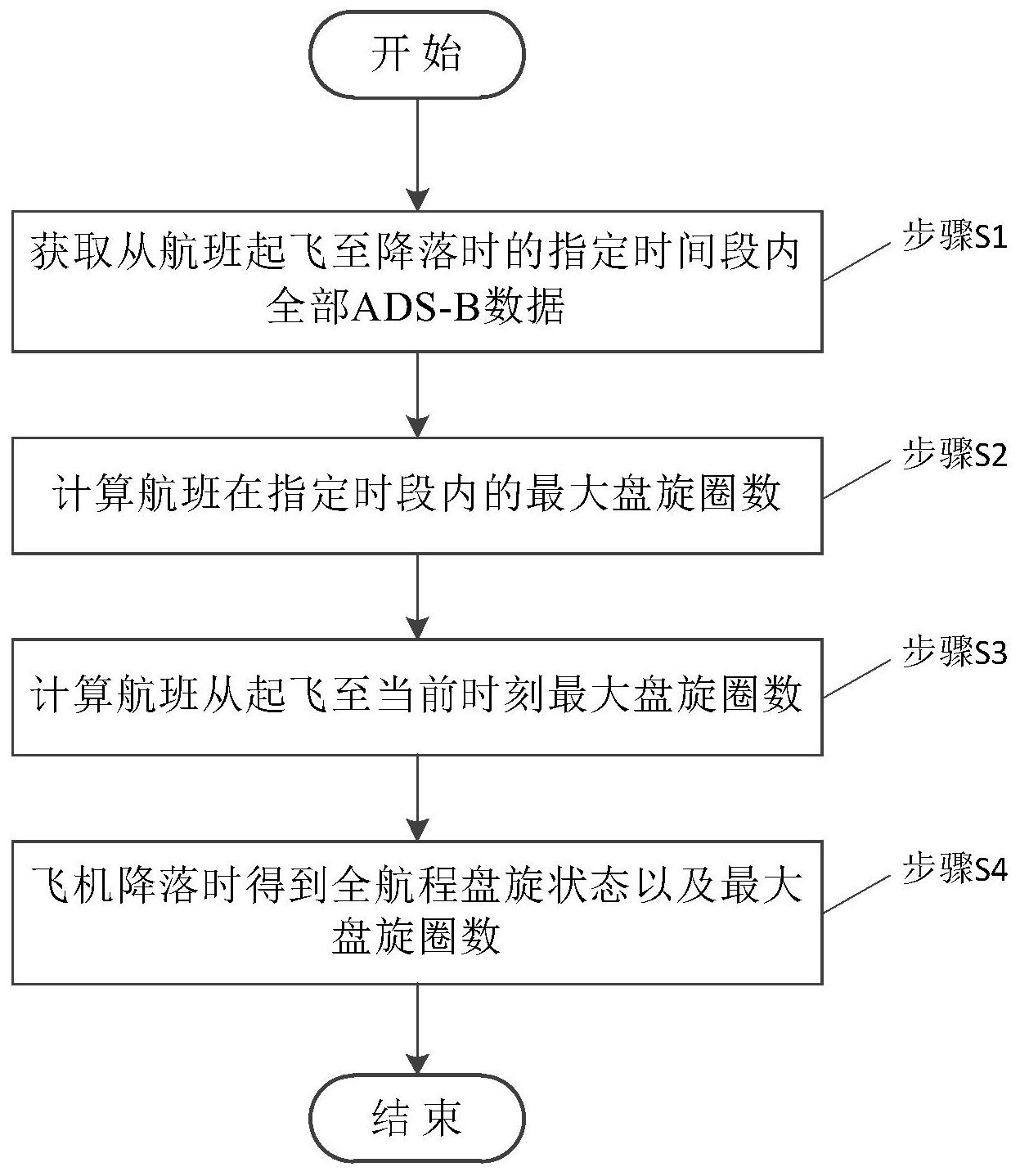
针对现有技术中所存在的问题,本发明提出一种航班空中盘旋状态判断方法,可 识别飞机在飞行过程中是否有盘旋现象,并精确地计算出航班围绕某个点的盘旋圈数。 为达到以上目的,本发明一方面提出一种航班空中盘旋状态判断方法,包括下述 步骤: 步骤S1、获取从航班起飞至降落时的指定时间段内全部ADS-B数据; 步骤S2、计算航班在指定时段内的最大盘旋圈数; 步骤S3、计算航班从起飞至当前时刻的最大盘旋圈数; 步骤S4、飞机降落时得到全航程盘旋状态以及最大盘旋圈数。 优选地,所述步骤S2计算飞机在选取时段内最大盘旋圈数的工作过程为: 步骤S21、确定候选中心点z0; 步骤S22、计算候选中心点z0与飞行轨迹点z之间复变函数积分绝对值: 步骤S23、计算所有候选中心点z0所对应曲线积分绝对值最大值,对积分绝对值最 大值取整数部分,得到飞机在该时段最大盘旋圈数; 4 CN 111611300 A 说 明 书 2/4 页 步骤S24、根据最大盘旋圈数判断该时段盘旋状态。 优选地,所述候选中心点z0和航行轨迹点z的位置信息为经度和维度,以复数表 示,其中经度为复数实部,纬度为复数虚部。 优选地,所述步骤S21沿该时段内飞机航行轨迹曲线搜索,间隔固定距离选取航行 轨迹点z左上角一点,作为候选中心点z0。 优选地,所述选取轨迹曲线位置点左上角一点为当前轨迹曲线位置点经度减偏移 值,轨迹曲线位置点纬度加偏移值。 优选地,所述步骤S24,若该时段最大盘旋圈数小于1,则该时段未发生盘旋;若该 时段最大盘旋圈数大于零,则该时段发生盘旋,并将该时段最大盘旋圈数与飞机从起飞开 始的最大盘旋圈数进行比较。 优选地,所述步骤S3的工作过程为: 步骤S31、遍历所有候选中心点,若积分绝对值大于等于1的候选中心点个数为0, 则尚未发生盘旋现象; 步骤S32、若积分绝对值大于等于1的候选中心点个数不为0,则对于所有候选中心 点采用聚类算法判断是否发生多次盘旋; 步骤S33、计算航班发生盘旋的次数,并求出每一次盘旋的盘旋圈数; 步骤S34、将各次盘旋圈数加和得到航班从起飞开始盘旋总圈数。 优选地,步骤S4当飞机降落时,若航班从起飞开始的盘旋总圈数等于0,则全航程 未发生盘旋;若航班从起飞开始的盘旋总圈数大于0,则航程中发生盘旋,并输出最大盘旋 圈数。 另一方面,本发明提供一种电子设备,包括中央处理器以及存储计算机可执行指 令的存储器,其特征在于,所述计算机可执行指令在被执行时使所述处理器执行上述方法。 再一方面,本发明提供一种非易失性存储介质,其中存储有计算机程序,所述计算 机程序在执行上述方法。 本发明相对于现有技术取得了如下的技术效果: 本发明的方法可以识别飞机在飞行过程中是否有盘旋现象,并精确地计算出航班 围绕某个点的盘旋圈数,不依赖于航班具体轨迹形状的识别,因而有助于克服原来方法的 缺陷,提高识别率。 附图说明 以下附图仅对本发明作示意性的说明和解释,并不用于限定本发明的范围,其中: 图1示出根据本发明一个实施例的一种航班空中盘旋状态判断方法流程图; 图2示出根据本发明一个实施例的计算航班在一段时期内最大盘旋圈数流程图; 图3示出根据本发明一个实施例的确定候选中心点方法的示意图; 图4示出根据本发明一个实施例的计算航班从起飞开始最大盘旋圈数流程图; 图5-7示出实施本发明方法识别并绘制的航班飞行轨迹曲线图。











