
技术摘要:
本发明公开了一种基于车路协同的混合交通横纵耦合控制方法,S1:获取第二车辆的初始时刻历史轨迹点;S2:实时采集第二车辆的行驶状态并传送给第一车辆;S3:判断第一车辆的当前行驶状态是否到达第二车辆的首个历史轨迹点的一定容错误差范围内,若是,则进行S4,若否, 全部
背景技术:
随着通信、传感、机械制造、自动化等技术的快速发展,应用在实车上的新兴自动 驾驶技术得以不断提高,交通系统也在朝向智能化不断的升级。因此,在新旧驾驶模式交替 之际,不可避免地会出现自动驾驶车辆与传统人驾车混行于同一交通道路的情况。为保障 在该情况下的交通安全和交通效率,需借助路侧设备的感知、通信能力,将自动驾驶车辆与 传统人驾车构建成简单的协同控制系统,并在横纵向上,控制自动驾驶车辆,以保证不同智 能化水平车辆在快速路弯道行驶过程中的间距一致性和速度一致性。 通过查阅相关专利和论文发现,横纵耦合的控制器输出的加速度、角速度与车辆 油门、刹车系统和转向系统存在强关联性,相较于横纵分离控制器,这种控制技术与车辆机 械层面的关联性可以极大提高车辆在弯道工况下的一致性。专利110654386A以全智能车为 研究对象,完全依赖实时感知前车运动状态和自车状态为控制输入,从横纵耦合的角度,实 现了智能车的弯道控制,然而该方法并不针对混合交通车队转弯问题。专利1106562253A基 于车载传感器,实时感知前车运动状态,设计了自适应巡航弯道跟随控制方法。但是该方法 需要以转弯过程中极高的车载感知设备监测精度为条件,同时必须保证转弯过程中,目标 车辆与前方车辆没有山体,树木等阻碍物,因此该方法的实际应用难度较大。
技术实现要素:
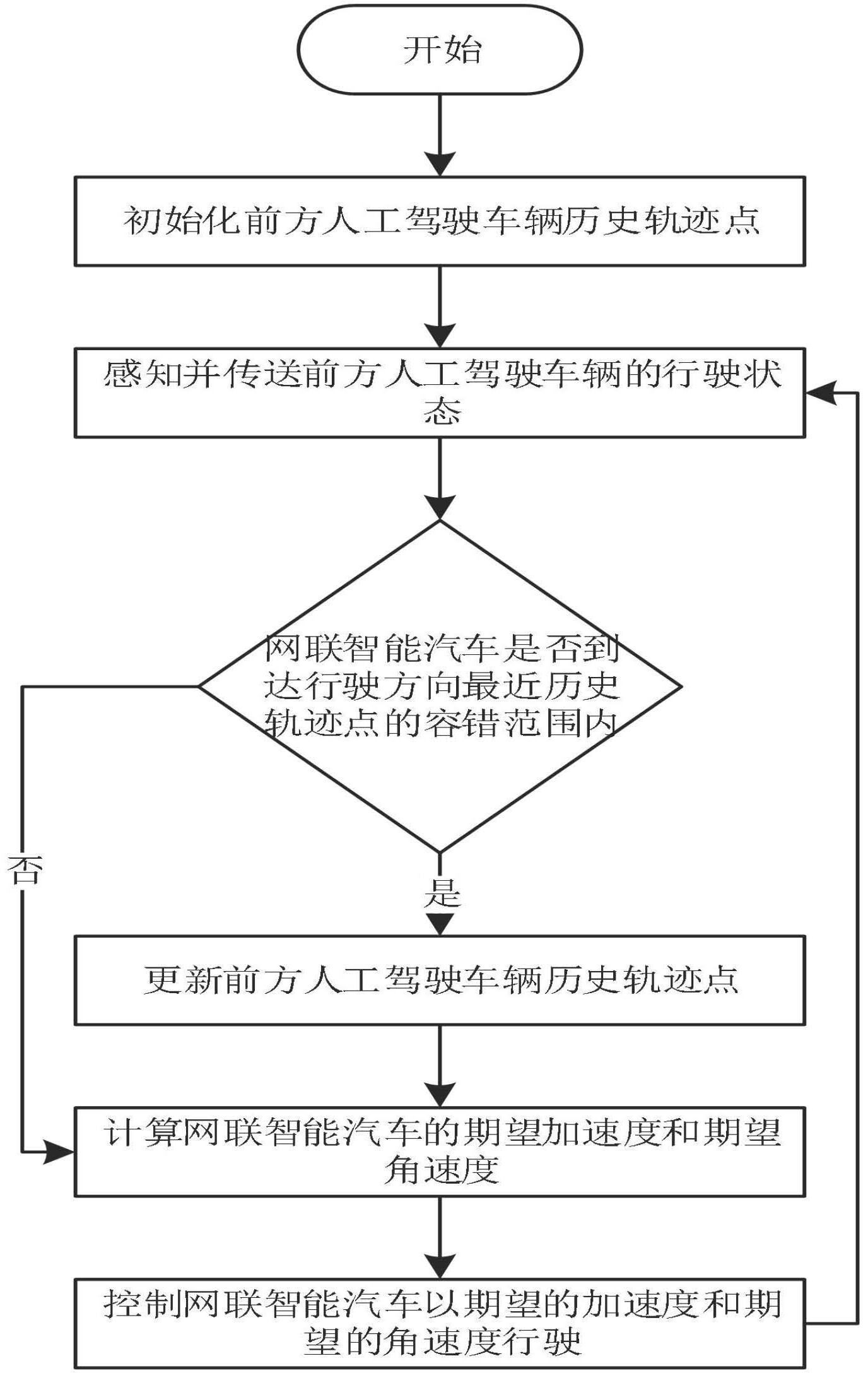
有鉴于此,本发明的目的是提供一种基于车路协同的混合交通横纵耦合控制方 法。 本发明的目的是通过以下技术方案实现的: 一种基于车路协同的混合交通横纵耦合控制方法, S1:获取第二车辆的初始时刻历史轨迹点,存储在第二车辆历史运动状态矩阵 中; S2:实时采集第二车辆的行驶状态并传送给第一车辆; S3:判断第一车辆的当前行驶状态是否到达 的一定容错误差Fd范围内,其中 为第二车辆的首个历史轨迹点,若是,则进行S4,若否,则进行S5; S4:更新第二车辆的历史运动状态矩阵 并传递给第一车辆,进入S5; S5:分析第二车辆的历史轨迹点的状态 和当前行驶状态SHV与第一车辆的行驶 状态SCAV之间的误差信号,计算第一车辆的期望加速度和期望角速度; S6:第一车辆以期望加速度和期望角速度行驶,并返回S2。 4 CN 111583636 A 说 明 书 2/5 页 进一步,所述S1具体为: S11:通过路侧设备采集所述第一车辆的前方道路的曲率信息,并获取所述第一车 辆和第二车辆在以所述路侧设备为原点的笛卡尔坐标系下的位置信息和偏航角信息; S12:以初始时刻的所述第一车辆和第二车辆所在的位置为端点,沿着其所在车 道,在所述第一车辆与第二车辆之间等间距地选择k个节点作为初始时刻所述第二车辆的 历史轨迹点 所有历史轨迹点的信息存储在所述第二车辆的历史状态 矩阵 中。 进一步,所述S3具体为: S31:获取当前所述第一车辆的行驶状态与 之间的距离 S32:比较 与Fd,若 则表示所述第一车辆的当前行驶状态未 到达 的一定容错误差Fd范围内,反之,则到达 的一定容错误差Fd范围内,其中Fd为 常数。 进一步,所述S4采用的方法为反向传递更新。 进一步,所述S5具体为: S51:建立所述第一车辆的二自由度模型,具体为: 其中: 分别为笛卡尔坐标系下第一辆车横、纵向位置, 速度,角度关于时间的微分量,vCAV、aCAV、ωCAV分别为所述第一车辆的速度、加速度、角速度; S52:获取所述第一车辆与第二车辆的安全间隔距离,具体为: 其中:ΨCAV,HV为安全间隔距离,b、h分别为最短刹车距离和车头时距; S53:以所述安全间隔距离为所述第一车辆与第二车辆之间的期望距离,获取所述 第一车辆与第二车辆的位置误差,具体的: 其中ex,CAV,HV(t)为笛卡尔坐标系下x方向的位置误差; ey,CAV,HV(t)为笛卡尔坐标系下y方向的位置误差; S54:获取所述第一车辆与第二车辆之间的速度误差,具体的: 5 CN 111583636 A 说 明 书 3/5 页 其中: 为 的角度补偿,ρ为一个常系数; S55:根据所述第一车辆的二自由度模型和τ的一阶项,获取所述第一车辆的期望 加速度和期望角速度,具体为: 其中:aCAV(t)为所述第一车辆的期望加速度; ωCAV(t)为所述第一车辆的期望角速度; τ为所述第二车辆的行驶状态并传送给所述第一车辆的时间延迟。 进一步,获取所述τ的一阶项的方法具体为: 将所述位置误差和速度误差对时间求导; 再经后向差分法解耦t和τ的关系; 最后用泰勒展开并保留τ的一阶项。 本发明的有益效果是: 本发明的一个有益效果在于引入历史轨迹点作为控制输入,设计了横纵耦合控制 方法,保证了网联智能汽车与前方人工驾驶车辆的跟车距离一致性和速度一致性;本发明 的另一个有益效果在于完成了混合交通下,通过应用车路协同技术,实现了不同智能化等 级车辆间的协同运动控制,可以在未来汽车从传统人驾时代过渡到完全智能化时代过程中 得以应用。 本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并 且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可 以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和 获得。 附图说明 为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进 一步的详细描述,其中: 附图1为本发明流程图; 附图2为基于车路协同的混合交通横纵耦合控制方法的流程图。











