
技术摘要:
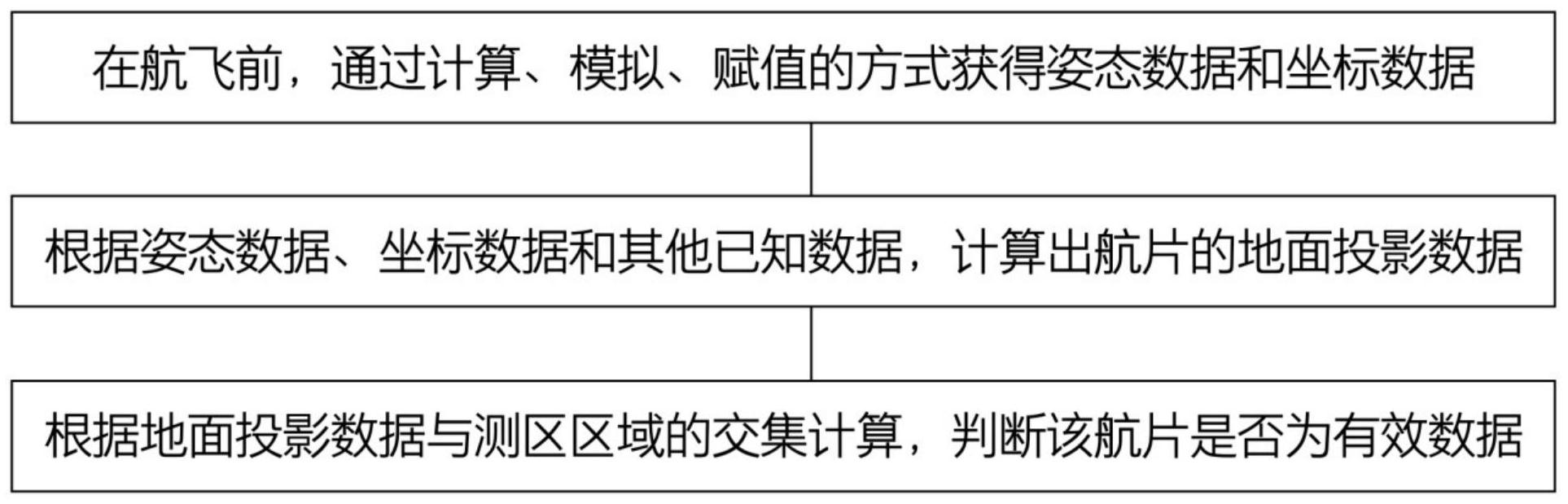
本发明公开了一种筛选航片的方法,该方法通过所获得的地面投影数据与目标区域已知数据相对比,判断是否保留已获得的航拍数据或判断在拍照坐标点是否进行拍照,所述地面投影数据获得的方式为:在航摄设备飞行前,通过计算、模拟或赋值的方式获得每个拍照点上图像传感器 全部
背景技术:
如申请号为:201810069841 .6的发明申请所述,针对基于数字摄影测量的航摄任 务,影像(航片)重叠率是目前航测工作中的重要控制参数或航测的影响因素。 现有技术中,为了保证目标区域的航片重叠率,会将目标区域范围按一定的方式 扩大,形成外扩区域,飞行航线会覆盖外扩区域。 目前的倾斜摄影航测作业中,飞行器多为搭载多相机航摄仪进行作业,为了拍摄 到测区外围建筑的外立面的信息,保证三维模型效果,实际飞行区域是大于测区的,这些大 于测区的区域称为外扩区域,测区 外扩区域=实际飞行区域。但这样做后,也会导致拍摄 许多与测区无关的航片数据,使得数据导出拷贝时间增加,后期计算机数据处理难度加大。 针对以上拷贝时间增加、计算机数据处理难度大的问题,现有技术中,如申请号为CN 201910674066.1的发明专利,提供了一种可有效减小航测作业过程中的数据处理量、提高 数据处理效率的技术方案。 对航测方法做进一步优化,以使得其能够更为高效的服务于航摄工作,是本领域 技术人员所亟待解决的技术问题。
技术实现要素:
针对上述提出的对航测方法做进一步优化,以使得其能够更为高效的服务于航摄 工作,是本领域技术人员所亟待解决的技术问题,本发明提供了一种筛选航片的方法。采用 本方法,可有效减少数据处理量和降低对飞行器硬件的要求。 针对上述问题,本发明提供的一种筛选航片的方法通过以下技术要点来解决问 题:一种筛选航片的方法,该方法通过所获得的地面投影数据与目标区域已知数据相对比, 判断是否保留已获得的航拍数据或判断在拍照坐标点是否进行拍照,所述地面投影数据获 得的方式为:在航摄设备飞行前,通过计算、模拟或赋值的方式获得每个拍照点上图像传感 器、航摄设备、航摄仪三者中任意一者的坐标数据和姿态数据,通过所述坐标数据和姿态数 据获得所述地面投影数据;所述判断位于航摄设备飞行前。 现有技术中,如申请号为CN201910674066.1的发明专利所述,现有技术中提供了 一种可有效减小航测作业过程中的数据处理量、提高数据处理效率的技术方案。以上方案 中,需要航摄设备在具体飞行过程中或飞行结束后,利用所获得的拍照点上航摄仪的参数, 判断是否拍照或是否保留拍照,若在飞行过程中解算,即:相应的航摄仪姿态数据和坐标数 据由姿态信息模块和位置信息模块在无人机飞行时记录和解算,航摄设备在整个拍照点分 布路径上均需要进行多次解算,以航摄设备本身作为记录和解算主体时,所需要的运算量 较大,这样,不仅数据处理量大,同时亦增加了对航摄设备的硬件要求、所搭载的能源要求、 或影响航摄设备的巡航旅程。 3 CN 111595303 A 说 明 书 2/6 页 若在飞行后解算,即:相应的航摄仪姿态数据和坐标数据由姿态信息模块和位置 信息模块在飞行时记录,在飞行完成后,将姿态数据、坐标数据与航片对应好,再导入计算 机进行处理,这样,不仅会产生更多工序,且大量航片数据的拷贝也需要花费大量时间,影 响工作效率。 以无人机作为飞行器为例,本方案提供的技术方案中,通过在航摄设备飞行前即 获得每个规划航线上每个航摄拍照点上航摄仪的姿态数据和坐标数据,在航摄设备飞行前 就通过上述数据获得地面投影数据后进行比较,即可得出每个拍照点上哪些图像传感器拍 摄的航片为无用航片,达到通过控制模块使得这些图像传感器在对应的拍照点不拍照或拍 照后删除的方式,减少航摄设备在飞行过程中其上的数据处理量和降低对飞行器硬件的要 求、在较少的工序下节约时间,提高工作效率。 综上,本方案在对图像传感器在对应的拍照点不拍照或拍照后删除的选择上,利 用提前于飞行进行相应判断操作的方式,可有效降低航摄设备上的计算量,达到节约计算 资源,节省存储空间、在较少的工序下节约时间,提高工作效率;同时,亦不用在航摄设备上 安装高精度的位置及姿态模块,这样可使得航摄设备的成本更低。 在具体运用时,现有技术中图像传感器在航摄设备上一般有固定的安装位置和姿 态,故针对图像传感器坐标数据和姿态数据的获取,已知航摄设备在拍照点的姿态数据和 坐标数据后,通过图像传感器在航摄设备上的具体安装情况即可换算出图像传感器的姿态 数据和坐标数据。考虑到航片地面投影数据精度,优选采用拍照点上每个图像传感器的坐 标数据和姿态数据作为所需的坐标数据和姿态数据。针对航片地面投影数据的获得方式, 可采用如利用所述的坐标数据、姿态数据,结合测区范围数据(如KML这种矢量数据)、测区 高程数据、项目要求的分辨率数据、航片重叠率数据、航摄仪的光学参数及几何参数进行计 算获得。更进一步的技术方案为: 作为所需坐标数据的具体获得方式,设置为,所述坐标数据的获得方式为:通过规 划出的航摄设备飞行航线,计算出航线上点的坐标数据,再根据航摄设备的参数设定和性 能参数,计算出航线中每个拍照点的坐标数据。更为具体的,在具体运用时,根据作业要求 (航片重叠率、分辨率等要求)、飞行器航速、测区KML数据、航摄仪参数等数据,规划出无人 机飞行航线。作为本领域技术人员,更为具体的:通过已知参数中的分辨率要求、测区范围 数据、测区高程数据、航摄仪参数等规划出航线,再通过已知数据中的重叠率要求、航摄仪 参数等数据计算出航线上的拍照点的坐标数据,可以再根据航摄仪的几何参数,通过拍照 点的坐标数据计算出每个图像传感器的坐标数据。 作为一种适用于良好飞行器飞行环境或精度要求低的运用场合,设置为,所述姿 态数据的获得方式为:以规划出的航摄设备飞行航线为参考,设定所有拍照点使用相同的 横滚、俯仰数据,针对各拍照点,利用飞行航线参数获得各拍照点上图像传感器的航向角, 利用所述横滚、俯仰数据以及航向角,获得每个拍照点上图像传感器的姿态数据。 作为一种精度更高,适用于有在先飞行参数的运用场合,设置为,所述姿态数据的 获得方式为:对之前飞行所获得的姿态数据进行整合,利用整合后得到的姿态数据,获得每 个拍照点上图像传感器的姿态数据。所述整合采用拟合的方式完成即可。针对之前飞行所 获得的姿态数据,所述飞行可以是与目前航线相同的航线,亦可是同类航摄设备飞行的与 目标航线不同的航线,针对可用的之前飞行所获得的姿态数据,在本领域技术人员判断该 4 CN 111595303 A 说 明 书 3/6 页 姿态数据可用于如进行上述拟合即可。优选采用与目标飞行相同的航线。 作为一种精度更高,适用于有模拟条件的运用场合,设置为,所述姿态数据的获得 方式为:以规划出的航摄设备飞行航线为参考,通过航摄设备参数、飞行区域的天气情况、 气候情况,通过模拟的方式获得每个拍照点上图像传感器的姿态数据。 作为一种适用于高精度,通过赋值的方式完成飞行前航拍数据是否产生或保留的 技术方案,设置为,所述姿态数据的获得方式为:在航摄设备上设置用于图像传感器姿态调 整的云台,并为规划出的航摄设备飞行航线上的各拍照点设定云台动作控制参数,将所述 云台动作控制参数下图像传感器的具体姿态数据作为各拍照点上图像传感器的姿态数据。 针对所述图像创拿起的具体姿态数据,可通过如下方式获得:记录所述云台动作控制参数 下航摄仪的具体姿态数据,并结合航摄仪的几何参数计算出各个图像传感器的姿态数据。 作为一种具体的在先飞行参数获取模式,设置为:所述的之前相同航线飞行所获 得的姿态数据的获得方式为:基于惯性测量单元,且惯性测量单元包含三个单轴的加速度 计和三个单轴的陀螺,加速度计检测航摄设备在坐标系统中任意轴上的加速度信号,陀螺 检测航摄设备相对于坐标系统的角速度信号,利用以上加速度信号和角速度信号,获得航 摄设备在三维空间中的角速度和加速度,并以此解算出航摄设备在航线上的姿态数据。 针对地面投影数据与目标区域范围数据相对比的方法,可以是将地面投影数据与 目标区块范围数据投影到同一水平面上,在同一水平面上计算两个范围之间交集的区域面 积是否大于阈值,若大于阈值,则说明该航片是拍摄到目标区域的,是有效数据,若等于或 小于阈值,则说明该航片没有拍摄到有效区域,是无效数据。 本发明具有以下有益效果: 以无人机作为飞行器为例,本方案提供的技术方案中,通过在航摄设备飞行前即 获得每个规划航线上每个航摄拍照点上航摄仪的姿态数据和坐标数据,在航摄设备飞行前 就通过上述数据获得地面投影数据后进行比较,即可得出每个拍照点上哪些图像传感器拍 摄的航片为无用航片,达到通过控制模块使得这些图像传感器在对应的拍照点不拍照或拍 照后删除的方式,减少航摄设备在飞行过程中其上的数据处理量和降低对飞行器硬件的要 求、在较少的工序下节约时间,提高工作效率。 综上,本方案在对图像传感器在对应的拍照点不拍照或拍照后删除的选择上,利 用提前于飞行进行相应判断操作的方式,可有效降低航摄设备上的计算量,达到节约计算 资源,节省存储空间、在较少的工序下节约时间,提高工作效率;同时,亦不用在航摄设备上 安装高精度的位置及姿态模块,这样可使得航摄设备的成本更低。 附图说明 图1为本发明所述的一种筛选航片的方法一个具体实施例的流程图; 图2为本发明所述的一种筛选航片的方法一个具体实施例的流程图中,获得航摄 仪中每个图像传感器的姿态数据的原理图; 图3为本发明所述的一种筛选航片的方法一个具体实施例的流程图中,获得航摄 仪中每个图像传感器的坐标数据的原理图; 图4为本发明所述的一种筛选航片的方法的一个具体实施例的实现流程图。 5 CN 111595303 A 说 明 书 4/6 页











