
技术摘要:
本发明公开了一种基于Stacking集成学习方式雷达HRRP目标识别方法,属于雷达目标识别领域。包括训练阶段和识别阶段,训练阶段:从原始HRRP中提取多种特征,然后再利用ReliefF算法和SVM_RFE算法对提取的特征进行挑选,基于挑选的特征子集,对三个基分类器进行训练,基分 全部
背景技术:
雷达自动目标识别技术是当前雷达信号处理的一个热点领域。相比于合成孔径雷 达图像和逆合成孔径雷达图像,高分辨距离像是一种包含丰富的目标结构信息且数据量较 少的一维高分辨率雷达信号,具有获取方便,处理简单,成本较低等优势。在实际的雷达目 标识别系统中,目标的识别准确率和识别系统复杂度是两个相互制约的因素。因此如何在 提高识别准确率的同时又不大幅度增加识别系统复杂度是一个亟待解决的问题。 近年来,决策融合和多特征融合被广泛应用到雷达自动目标识别方法中,基于特 征融合或决策融合的雷达HRRP目标识别算法被陆续推出。但都存在着识别准确率低、识别 效率低、没有把特征融合与决策融合相结合等问题。
技术实现要素:
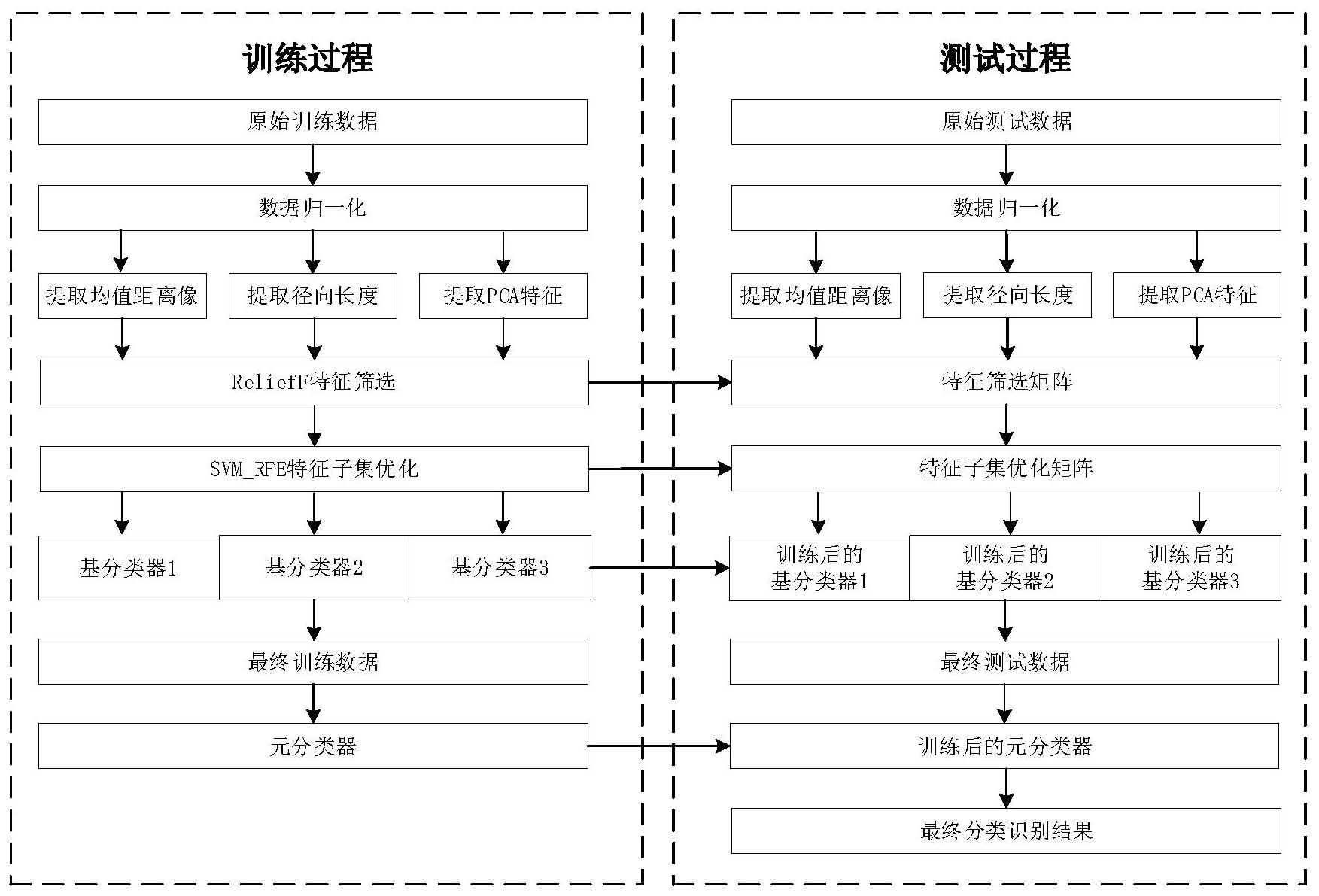
针对以往雷达HRRP目标识别算法存在识别准确率低、特征融合与决策融合没有结 合等问题。受无用冗余特征会降低识别效率和识别准确率,不同分类器具有不同的识别优 势的启发,本发明提出一种基于Stacking集成学习方式雷达HRRP目标识别方法。该方法能 够有效提高识别准确率,识别算法复杂度也不高,同时具有较好的识别效率。 本发明采用的技术方案为,一种基于Stacking集成学习方式雷达HRRP目标识别方 法,包括以下步骤: S1按照训练集应尽量包含目标各角度的数据,且测试集与训练集的样本不重复出 现的规则,建立训练集和测试集:对于训练集中第i类目标的第j个HRRP样本可以表示为 对于测试集中第i类目标的第j个HRRP样本可以表示为 n表示HRRP样本的第n个采样点,N代表HRRP样本中共有N个采 样点。 S2训练阶段,训练时先从HRRP训练样本中提取均值距离像特征、径向长度特征、 PCA变换特征。再把三类特征串联成组合特征,然后用ReliefF算法筛选特征,用SVM_RFE算 法从筛选后的特征中提取最优特征子集,最后基于最优特征子集,利用Stacking集成学习 的方式获得训练后的基分类器和元分类器,具体如下: S2.1对第i类目标的第j个HRRP训练样本 做2范数 归一化,得到归一化后HRRP训练样本信号 6 CN 111598163 A 说 明 书 2/6 页 S2.2基于归一化HRRP训练样本信号 进行特征提取,将提取的三类特征串联成 组合特征,具体步骤如下: S2.2.1提取归一化后HRRP训练样本信号 的均值距离像特征 整个训练集对应的均值距离像特征为 其中z表示每 类目标均有z个训练样本。 S2.2.2提取归一化后HRRP训练样本信号 的径向长度特征 具体如下:计算 的幅度均值 阈值设定为 依次将 中第1至第 个采样点的幅度与阈值进行对比,第1至第 个采样点的坐标依次为 将第一个大 于阈值的点的坐标值记为 再依次将 中的第n至第 个采样点的幅度与阈 值进行对比,第n至第 个采样点的坐标依次为 将第一个大于阈值的 点的坐标值记为 则第i个目标的第j个HRRP训练样本对应的径向长度特征可表示 为 整 个 训 练 集 对 应 的 径 向 长 度 特 征 为 其中z表示每类目标均有z个训练样本。 S 2 . 2 . 3 提 取 归 一 化 后 H R R P 训 练 样 本 信 号 的 P C A 变 换 特 征 为变换后获得的特征,pca为MATLAB中的函数。整个训练集对应的 PCA变换特征为Fpca: 其中 z表 示每类目标均有z个训练样本。 S2 .2 .4将上述三类特征串联起来,拼接成一个组合特征,则第i个目标的第j个 H R R P 样本对应组合特征为 整个 训练集对应的组合特征为 S2.3利用RelifF算法对F进行权重计算并排序[Fr,sortr]=RelifF(F),其中Fr是 按照权重从高到低排列好的特征,sortr是生成的特征排序矩阵,可用于测试数据中样本特 7 CN 111598163 A 说 明 书 3/6 页 征权重的排序,使用该算法的原因是初步筛除无用的特征,减少SVM_RFE算法的运行压力。 S2.4利用SVM_RFE算法寻找Fr中的最优特征子集[Fs,sorts]=SVM_RFE(Fr),获得 最优特征子集Fs和最优特征子集提取矩阵sorts,为测试数据最优特征子集提取做准备。 S2.5借助Stacking集成学习的方式训练三类基分类器和一个元分类器,第一类基 分类器为支持向量机分类器(SVM),第二类基分类器为k近邻分类器(KNN),第三类基分类器 为随机森林分类器(RF),元分类器为k近邻分类器(KNN),具体操作如下: S2.5.1先将S2.4获得的最优特征子集F 1 2 3 4 5s等分为5份:Fs ,Fs ,Fs ,Fs ,Fs ,训练第一 类基分类器SVM中的第1个分类器SVM1时,用F 1s 做验证测试数据,用F 2 3s ,Fs ,F 4s ,F 5s 做训练数 据训练分类器SVM1,验证测试结果记为P 1svm ,训练支持向量机分类器SVM中的第2个分类器 SVM2时,用F 2做验证测试数据,用F 1,F 3,F 4,F 5s s s s s 据做训练数据训练分类器SVM2,验证测试结 果记为P 2,……,依次把F 3,F 4svm s s ,F 5s 分别作为验证测试数据,其余四份数据做训练数据,可 获得五个训练好的第一类基分类器SVM1,SVM2,SVM3,SVM4,SVM5,同时还可获得五份验证测试 结果Psvm=[P 1,P 2 3 4 5 Tsvm svm ,Psvm ,Psvm ,Psvm ] 。 S2.5.2按S2.5.1的训练方法对第二类基分类器KNN和第三类基分类器RF进行训练 验证测试,同样可获得五个训练好的第二类基分类器KNN1,KNN2,KNN3,KNN4,KNN5以及五个训 练好的第三类基分类器RF1 ,RF2 ,RF3 ,RF4 ,RF5,还可获得验证测试结果Pf_knn=[P 1f_knn , P 2f_knn ,P 3 4 5 T 1 2 3 4 5 Tf_knn ,Pf_knn ,Pf_knn ] 及Prf=[Prf ,Prf ,Prf ,Prf ,Prf ] 。 S2.5.3把上述验证测试结果拼接,作为最新的训练数据Flast=[Psvm,Pf_knn,Prf]; S2.6把Flast=[Psvm ,Pf_knn,Prf]导入元分类器KNN进行训练,获得训练好的元分类 器。 S3测试阶段:测试时先从HRRP训练样本中提取均值距离像特征、径向长度特征、 PCA变换特征。把以上三类特征串联成组合特征,再依次乘以训练时获得的特征排序矩阵和 最优特征子集提取矩阵,得到最优特征子集。然后将最优特征子集导入已训练好的基分类 器,得到最新的测试数据集,最后利用已训练好的元分类器对将该最新测试数据集进行分 类,得到最终的分类结果,具体如下: S3.1对第i类目标的第j个HRRP测试样本 做2范数归 一化,得到归一化后HRRP测试样本信号 S3.2基于归一化HRRP测试样本信号 进行特征提取,将提取的三类特征串联成 组合特征,具体步骤如下: S3.2.1提取归一化后HRRP测试样本信号 的均值距离像特征 整个测试集对应的均值距离像特征为 8 CN 111598163 A 说 明 书 4/6 页 其中y表示每类目标均有y个测试样本。 S3.2.2提取归一化后HRRP测试样本信号 的径向长度特征 具体过程如下: 求出 的幅度均值 阈值设定为 依次将 中的 第1至第 个采样点的幅度与阈值进行对比,第1至第 个采样点的坐标依次为 将第 一个大于阈值的点的坐标值记为 再依次将 中的第n至第 个采样点的幅度 与阈值进行对比,第n至第 个采样点的坐标依次为 将第一个大于阈 值的点的坐标值记为 则第i个目标的第j个HRRP测试样本对应的径向长度特征可 表示为 整个测试集对应的径向长度特征为 其中y表示每类目标均有y个测试样本。 S 3 . 2 . 3 提 取 归 一 化 后 H R R P 测 试 样 本 信 号 的 P C A 变 换 特 征 为变换后获得的特征,pca为MATLAB中的函数,整个测试集对应的 PCA变换特征为fpca: 其中y表示每 类目标均有y个测试样本。 S3 .2 .4将上述三类特征串联起来,拼接成一个组合特征,则第i个目标的第j个 HRRP测试样本对应的组合特征为 整个测试集对应的组合特征为 S3.3利用S2.3获得的sortr乘以组合特征f,进行特征筛选,获得筛选后的特征fr= f×sortr。 S3.4利用S2.4获得的sorts乘以筛选后的特征fr,获得所需的最优特征子集fs=fr ×sorts。 S3.5将最优特征子集fs依次导入训练时获得的五个已训练好的第一类基分类器 SVM1,SVM2,SVM3,SVM4,SVM5中,获得五个分类结果R 1,R 2,R 3,R 4,R 5svm svm svm svm svm ,将这五个分类 结果平均得到Rsvm,作为最新的测试数据的一个子集。 按上述方法,将最优特征子集fs依次导入训练时获得的五个训练好的第二类基分 类器KNN1,KNN2,KNN3,KNN4,KNN5以及五个训练好的第三类基分类器RF1,RF2,RF3,RF4,RF5中, 分别获得最新的测试数据的子集Rf_knn和Rrf。将三个测试子集拼接为一个总的测试数据集 Tlast=[Rsvm,Rf_knn,Rrf]。 S4用S2.6训练好的元分类器对最新的测试数据集Tlast=[Rsvm ,Rf_knn ,Rrf]进行分 类,得到最终的分类结果。 本发明具有以下有益效果:通过该发明能够有效提高雷达HRRP多分类目标识别准 9 CN 111598163 A 说 明 书 5/6 页 确率,且该发明复杂度不高,同时具有较好的识别效率,对于雷达自动目标识别具有重要的 工程应用价值。 附图说明 图1是基于Stacking集成学习方式雷达HRRP目标识别方法训练和测试阶段的示意 图; 图2是实验中所用10类目标的光学图像和HRRP示意图,从左到右,自上而下分别为 BMP2,BTR70,T72,BTR60,2S1,BRDM2,D7,T62,ZIL以及ZSU; 图3是本发明中涉及的Stacking集成学习分类示意图,图中的Mode1、Mode2、Mode3 分别代表三类基分类器SVM、KNN、RF,图中的元分类器为KNN。











