
技术摘要:
本发明公开了一种机械施工平台,包括控制室、底盘、支撑座、回转机构、机械臂和平台本体,所述控制室安装于所述支撑座上,所述机械臂的一端与所述支撑座相连接;所述支撑座通过所述回转机构转动安装于所述底盘上;所述机械臂的另一端与所述平台本体相连接。本发明结构 全部
背景技术:
现有建筑工程等作业中,一般采用剪叉式作业平台等高空作业设备辅助作业人员 进行高空作业,给作业带来了极大的便利。但现有高空作业设备由于具有较复杂的液压系 统等,结构复杂,制造成本高,提高了作业成本,因此有待设计一种新型机械施工平台,能用 于高空作业,而且没有复杂的液压系统,作业安全性高,此有待进一步研发解决。
技术实现要素:
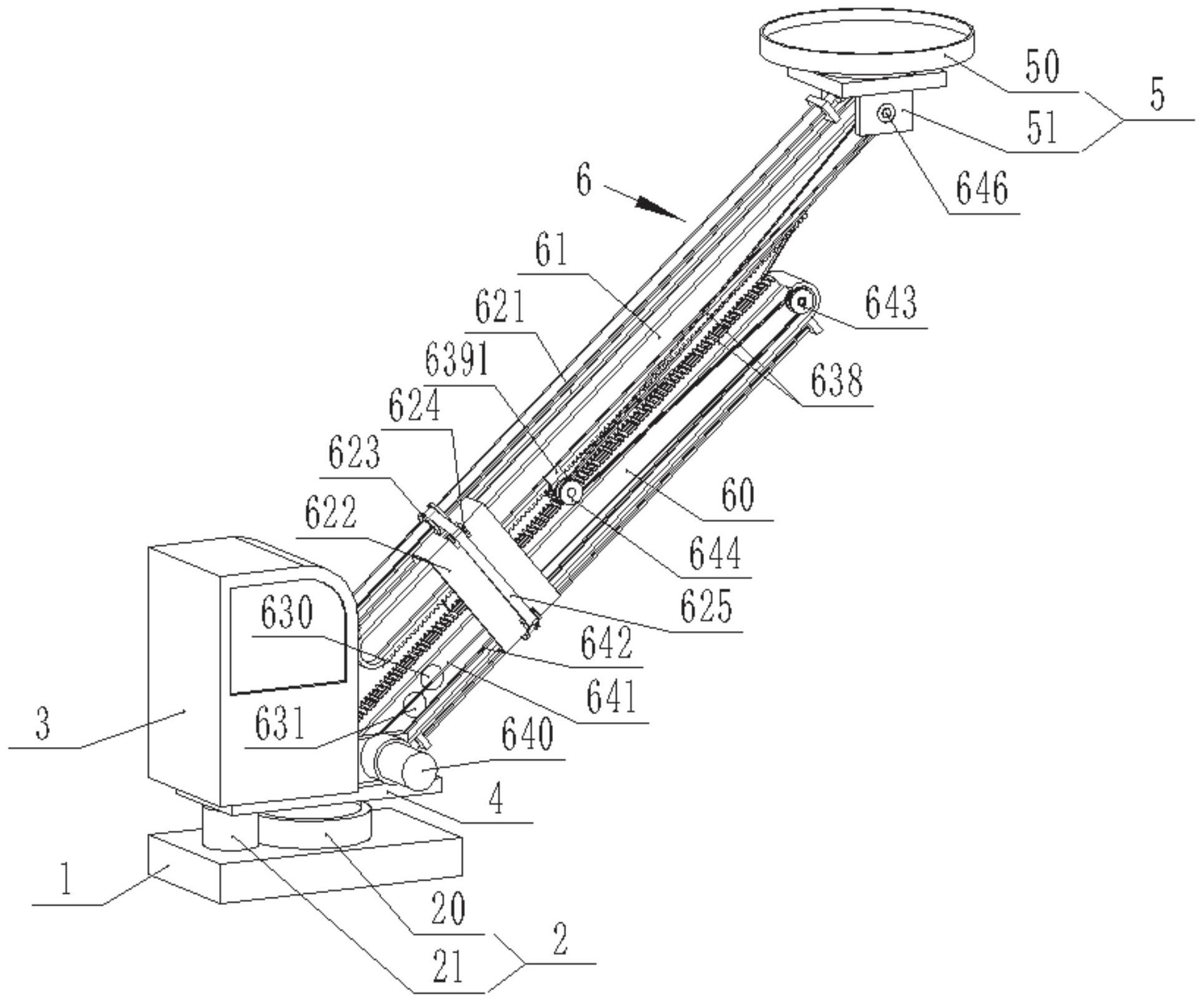
本发明的目的就在于克服现有技术的不足,提供了一种结构设计巧妙,使用方便, 作业安全性高的机械施工平台。 为了实现上述目的,本发明提供了一种机械施工平台,包括控制室、底盘、支撑座、 回转机构、机械臂和平台本体,所述控制室安装于所述支撑座上,所述机械臂的一端与所述 支撑座相连接;所述支撑座通过所述回转机构转动安装于所述底盘上;所述机械臂的另一 端与所述平台本体相连接。 进一步地,所述机械臂包括大臂、小臂、伸缩驱动机构、旋转驱动机构,所述平台本 体包括安装架、转动安装于所述安装架上的旋转平台;所述旋转驱动机构包括旋转驱动电 机、花键轴、花键带轮、同步带、滑套、第一移动导向机构、旋转齿盘、轴承座、导向带轮; 所述大臂和小臂呈上下叠加设置,且所述小臂位于所述大臂的上方;所述小臂通 过所述伸缩驱动机构与所述大臂相连接; 所述大臂的下端与所述支撑座相连接,所述小臂的上端与所述安装架相连接;所 述旋转平台底部呈球形结构,所述旋转平台球形结构处沿圆周均布设有多个相间的齿槽; 所述旋转齿盘包括盘体、沿所述盘体上圆周均布设置的多个驱动齿; 所述滑套外套与所述大臂和小臂上,所述滑套通过所述第一移动导向机构与所述 大臂移动配合连接,所述滑套通过所述第一移动导向机构与所述小臂移动配合连接;两所 述花键轴相平行且分别通过所述轴承座转动安装于所述小臂和大臂上;所述花键轴上安装 有所述花键带轮,所述滑套外壁转动安装有多个所述导向带轮,所述同步带绕设在所述花 键带轮和导向带轮上;位于所述大臂上的花键轴与所述旋转驱动电机相连接,所述旋转驱 动电机安装于所述大臂上;位于所述小臂上的花键轴的端部与所述旋转齿盘包括的盘体相 连接,所述驱动齿与所述齿槽相配合。 进一步地,所述第一移动导向机构包括导向槽、与所述导向槽相配合的滑块,所述 滑块与所述滑套相连接,所述大臂和小臂上均设有所述导向槽。 进一步地,所述导向槽呈T型结构、燕尾槽结构、V型结构中的任一种。 进一步地,所述伸缩驱动机构包括缩回驱动组件、伸出驱动组件和第二移动导向 机构,所述缩回驱动组件包括缩回驱动电机、缩回驱动带轮、缩回导向带轮、缩回同步带,所 4 CN 111573575 A 说 明 书 2/6 页 述伸出驱动组件包括伸出驱动电机、伸出驱动带轮、伸出导向带轮、伸出同步带; 所述伸出驱动电机和缩回驱动电机均安装于所述大臂的下端,所述伸出驱动带轮 安装于所述伸出驱动电机上,所述缩回驱动带轮安装于所述缩回驱动电机上;所述伸出导 向带轮转动安装于所述大臂的上端;所述伸出同步带的一端与所述伸出驱动带轮相连接, 且绕设在所述伸出导向带轮上后,所述伸缩同步带的另一端与所述小臂的下端相连接; 两所述缩回导向带轮相间转动安装于所述大臂的上端;所述缩回同步带的一端与 所述缩回驱动带轮相连接,依次绕设两所述缩回导向带轮后,所述缩回同步带的另一端与 所述小臂的上端相连接;所述大臂和小臂之间通过所述第二移动导向机构相连接。 进一步地,所述第二移动导向机构包括齿条、齿轮、齿轮滑座,所述大臂和小臂上 均设有齿条,且所述大臂的齿条和小臂上的齿条相对,所述齿轮安装于两所述齿条之间,且 所述齿轮与两所述齿条相啮合,所述小臂上设有滑轨,所述齿轮滑座上设有滑槽,所述齿轮 滑座通过所述滑槽移动配合安装于所述滑轨上,所述齿轮滑座与所述齿轮转动连接。 进一步地,所述机械臂还包括上下摆动驱动机构,所述上下摆动驱动机构包括摆 动驱动电机、第一牵引绳、第二牵引绳、驱动轮、驱动轴、导向轮、过渡轮、转动轴、转动轮,所 述大臂的下端通过所述驱动轴与所述支撑座转动连接,所述小臂的上端通过所述转动轴与 所述安装架转动连接; 所述驱动轮安装于所述驱动轴上,所述转动轮安装于所述转动轴上,所述摆动驱 动电机与所述驱动轴相连接,且所述摆动驱动电机与所述支撑座相连接;所述导向轮转动 安装于所述大臂的上端;所述过渡轮转动安装于所述齿轮滑座上; 所述第一牵引绳的一端与所述驱动轮相连接,且所述第一牵引绳依次绕设所述导 向轮和过渡轮后与所述转动轮相连接;所述第二牵引绳的一端与所述驱动轮相连接,且所 述第二牵引绳依次绕设所述导向轮和过渡轮后与所述转动轮相连接;所述第一牵引绳驱动 所述转动轮旋转的方向与所述第二牵引绳驱动所述转动轮旋转的方向的相反。 进一步地,所述平台本体还包括设于所述旋转平台上方的围栏。 本发明通过控制室控制机械臂动作,回转机构实现整个平台的360°回转。底盘根 据现有工况可以采用轮式底盘,也可以采用履带式底盘。 本发明通过伸缩驱动机构驱动小臂相对于大臂伸缩,以实现机械臂长度的调节, 从而提高作业范围。通过旋转驱动机构实现旋转平台旋转角度的调节,且机械臂伸缩时,旋 转驱动机构依然可以传递动力,实现机械臂边伸缩边调节旋转平台的角度,使用灵活。 本发明通过上下摆动驱动机构,驱动机械臂上下摆动,以实现平台本体高度的调 节,提高作业范围。且机械臂上下摆动过程中,驱动平台本体同步摆动,保证平台本体始终 与地面平行,保证作业人员作业的安全性。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他的附图。 图1为本发明的立体图。 5 CN 111573575 A 说 明 书 3/6 页 图2为图1旋转一定角度后的立体图。 图3为本发明机械臂的立体图。 图4为图3的结构示意图。 图5为图3旋转一定角度后的立体图。 图6为图3剖切滑套处的局剖剖面图。 图7为图1的局部放大立体图。 图8为本发明旋转平台的立体图。 上述附图标记: 1底盘,2回转机构,20回转支撑,21回转驱动电机,3控制室,4支撑座,5平台本体, 50旋转平台,501齿槽,51安装架,6机械臂,60大臂,61小臂,611滑轨,620旋转驱动电机,621 花键轴,622滑套,623花键带轮,624导向带轮,625同步带,626轴承座,627旋转齿盘,629滑 块,6270盘体,6271驱动齿,630伸出驱动电机,631缩回驱动电机,632伸缩驱动带轮,633缩 回驱动带轮,634伸出同步带,635缩回同步带,636伸出导向带轮,637缩回导向带轮,638齿 条,639齿轮,6391齿轮滑座,640摆动驱动电机,641第一牵引绳,642第二牵引绳,643导向 轮,644过滤轮,645转动轮,646转动轴,628驱动轴。











