
技术摘要:
一种接收机自主完好性故障检测方法,步骤如下:1、计算历元t时参与定位的每个卫星的权重;2、建立历元t的定位方程,求解定位结果;3、计算定位结果的标准误差,将标准误差与预先设计的定位误差门限值比较,若低于预先设计的定位误差门限值,则表明本次定位成功,执行步 全部
背景技术:
在使用卫星导航系统对接收机进行定位的时候,卫星系统的故障(如电子故障、卫 星播发的星历与时钟错误、异常的大气延时、多路径及接收机自身的故障等)会引起测量值 的误差,从而导致用户接收机输出的定位结果出现较大误差,进而可能对用户自身的安全 等产生不利影响。随着全球卫星导航系统的快速发展和广泛使用,实时快速的完好性监测 就发挥着越来越重要的作用。 RAIM(Receiver Autonomous Integrity Monitoring,接收机自主完好性监测)是 接收机自身对卫星测量值进行实时监测,利用接收机收到的多个卫星观测量形成的冗余对 故障进行监测并识别。它的优点在于不需要外部设备的辅助,成本低,易实现。 目前,广泛使用的RAIM方法主要有残差分析法和最大解分离法两大类。残差分析 法主要是基于最小二乘残差,在最小二乘定位后,计算残差平方和或学生化残差,并与门限 值比较,但是最小二乘方法对故障星非常敏感,当存在故障星时,该故障星的较大误差会导 致定位方程的结果出现严重偏移,可能导致故障星的残差绝对值变小,而非故障星的残差 绝对值变大,这往往会导致误判,不能准确的识别出真正的故障星,而且需要剔除故障星后 再次定位,增加了运算时间。最大解分离法则将n个观测值分为至少n组,每一组剔除若干颗 星,对这n组卫星组合分别进行定位,并计算一些统计量,例如定位后残差平方和等等,与门 限值相比,偏离最远的组合对应即为故障星,但该方法需要对未知的故障卫星的个数做出 假设,且每一个组合都需要求解一次,计算量太大,且错误的故障卫星数假设也会导致误判 和失败的概率增加。
技术实现要素:
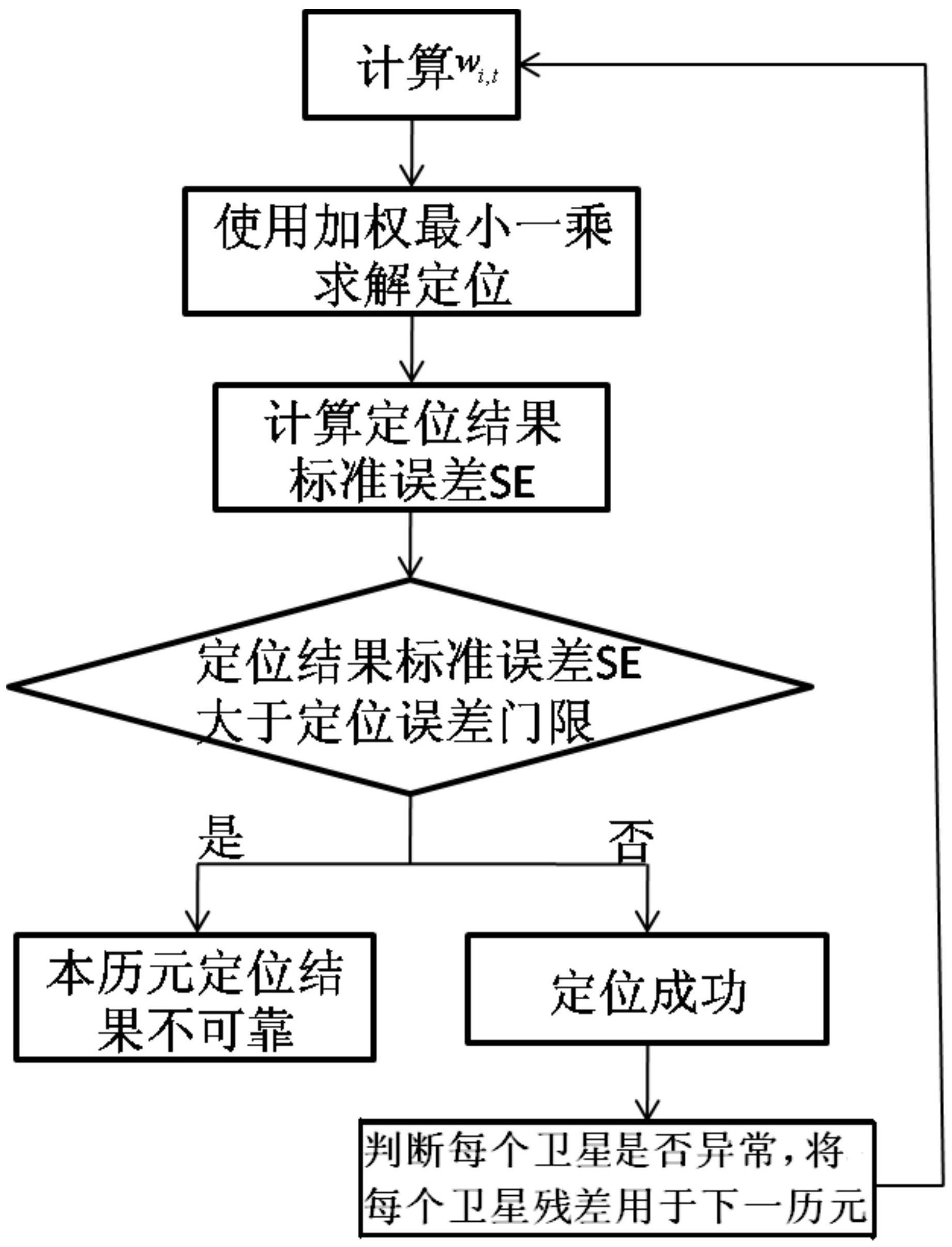
本发明的技术解决问题是:克服现有技术的不足,提供一种接收机自主完好性故 障检测方法,解决了传统的RAIM方法准确率低且运算量大的缺点,具有较高的准确率,同时 运算量小、速度快。 本发明采用了如下所述的技术方案: 一种接收机自主完好性故障检测方法,包括以下步骤: 步骤1、计算历元t时参与定位的每个卫星的权重; 步骤2、建立历元t的定位方程,使用加权最小一乘方法求解定位结果; 步骤3、计算定位结果的标准误差,将标准误差与预先设计的定位误差门限值比 较,若低于预先设计的定位误差门限值,则表明本次定位成功,执行步骤4,若标准误差高于 预先设计的定位误差门限值,则表明本次定位结果不可靠,历元t时的故障检测结束; 步骤4、判断每颗卫星是否出现异常,完成当前历元t的故障检测,并记录当前历元 4 CN 111580136 A 说 明 书 2/6 页 t时卫星i的定位残差供下一历元使用,进入步骤5; 步骤5、t的值加1,执行步骤1-步骤4,进行下一历元的故障检测。 所述步骤1中,按照以下公式计算卫星i在历元t时的权重wi,t: 其中i为参与定位的卫星编号,i的取值从1到n,n为参与本次定位的卫星总个数; sigmoid函数定义为: I为示性函数, a1,a0,b1,b0,c为常数,根据多次实验或经验确定;T1为卫星观测误差门限值,根据 多次实验或经验确定; eli,t为卫星i在历元t时的俯仰角,单位为度; cnoi,t为卫星i在历元t时的载噪比; εi,t-1为上一个历元t-1时卫星i的定位残差。 所述步骤2中,建立的定位方程为Y=Xβ ε,其中Y为伪距观测量n×1矩阵,X为伪距 观测几何矩阵,为n×p维,ε为n维误差向量,β为p维未知参数向量,为待求解参数。 使用加权最小一乘法求解定位方程: 其中Yi,Xi分别为Y,X的第i行,Yi为卫星i的伪距观测量,Xi为卫星i的伪距观测几 何向量, 为求解得到的p维未知参数向量,即定位结果, 使用单纯形法求解得到; 误差 其中 为长度为n的向量。 利用如下公式计算定位结果的标准误差SE: 其中 为定位结果p维未知参数向 量的协方差矩阵, 为协方差矩阵 第k行第l列的元素。 其中f(0)为误差 的密度函数在点0处的值。 f(0)基于 用概率统计的方法进行估算。 所述步骤4中,设 为 的第i个元素,代表卫星i的定位残差,将 与卫星观测误 差门限值T1比较,若 高于卫星观测误差门限值T1,则表明卫星i存在异常;若 不高于卫 星观测误差门限值T1,则表明卫星i正常。 T1根据经验或多次重复观测试验获取,当通过多次重复观测试验获取时,方法如 下: 5 CN 111580136 A 说 明 书 3/6 页 多次重复观测试验获得多个|εi,t-1|数据,T1为多个εi,t-1数据的95%分位点。 预先设计的定位误差门限值根据经验或多次重复观测试验选取,当通过多次重复 观测试验选取时,方法如下: 根据多次重复观测试验获得多个标准误差值,预先设计的定位误差门限值为多个 标准误差值的95%分位点。 本发明具有以下优点: (1)本发明在权重函数的设计上,不但将俯仰角和载噪比结合,且利用了上一历元 卫星故障信息,能够动态调整权重,通过控制权重减少了故障卫星对定位的影响,在定位解 算的同时就可以进行故障检测和剔除,运算步骤少,避免了其他方法在定位后判断并剔除 故障卫星后再次定位求解的过程,减少了运算量,加快了运行速度。 (2)本发明在定位时,使用最小一乘,比其他最小二乘求解方法更加稳健。最小二 乘法对权重设置和卫星误差非常敏感,这两者稍有偏差就会导致定位结果偏移较大,易发 生误判,而最小一乘法对故障卫星不敏感,对权重设置也不敏感,当卫星出现故障导致误差 较大,及权重设置有偏差的时候,仍然能得到可靠的定位结果,提高了故障检测的成功率。 (3)本发明权重函数采用sigmoid函数,该函数与其他方法采用线性或指数函数不 同的是,其他方法采用的线性或指数函数当卫星的俯仰角或载噪比很高的时候,权重增加 的很快,导致单个卫星对定位结果的影响非常大,而这一设置与实际不完全相符,通过实验 发现卫星载噪比和俯仰角高于一定程度时,定位误差并不会再减少。本发明采用的权重函 数是非线性的,当俯仰角或载噪比大于一定值的时候,权重接近1达到饱和,再增加俯仰角 或载噪比对权重增加的影响变小,而当俯仰角或载噪比小于一定值的时候,权重接近0,再 降低俯仰角或载噪比对权重增加的影响也变小。这样设置使得定位时可以充分利用多个卫 星的信息,定位结果更加准确。 附图说明 图1为本发明流程图。











