
技术摘要:
本发明实施例提供了一种机械臂的标定方法、装置、系统及存储介质。该方法应用于包括法兰且在法兰末端安装有标定块的机械臂,获取待标定区域的多个边界点的第一位置信息,根据所述第一位置信息生成在所述待标定区域的范围内的标定路径,并确定所述标定路径上的多个标定 全部
背景技术:
随着能够进行各类作业的自动控制设备的应用越来越广泛,机械臂作为一种模仿 人类手臂功能并可以完成各种作业的自动控制设备,已经广泛地应用于各个领域。 目前,这种机器人系统有多个关节连接并允许在平面或三维空间进行运动,从而 实现各种动作。机械臂要正常使用,需要在使用前进行手眼标定,也就是说,需要将通过三 维(Three-dimensional,简称为3D)视觉传感器获得的目标点的位置信息变换到机械臂的 基坐标系下,即求解3D视觉传感器坐标系和机械臂基坐标系的变换关系。之后,才能根据手 眼标定结果完成机械臂运动目标点检测,通过运动规划完成机械臂的自主移动。 然而,相关技术中的手眼标定方法,需要将3D视觉传感器安装在机械手末端,将测 量工件放置在地面进行测量计算,再反复人工移动机械手臂到不同位置,通过将多次测量 计算得到的结果联立方程组求解机械手法兰坐标系与3D视觉传感器坐标系之间的齐次变 换矩阵。相关技术中的手眼标定的过程,每当3D相机采集完一个点后,标定操作人员需要手 动移动机械臂到下一个位置,操作不友好且耗时,标定效率较低。
技术实现要素:
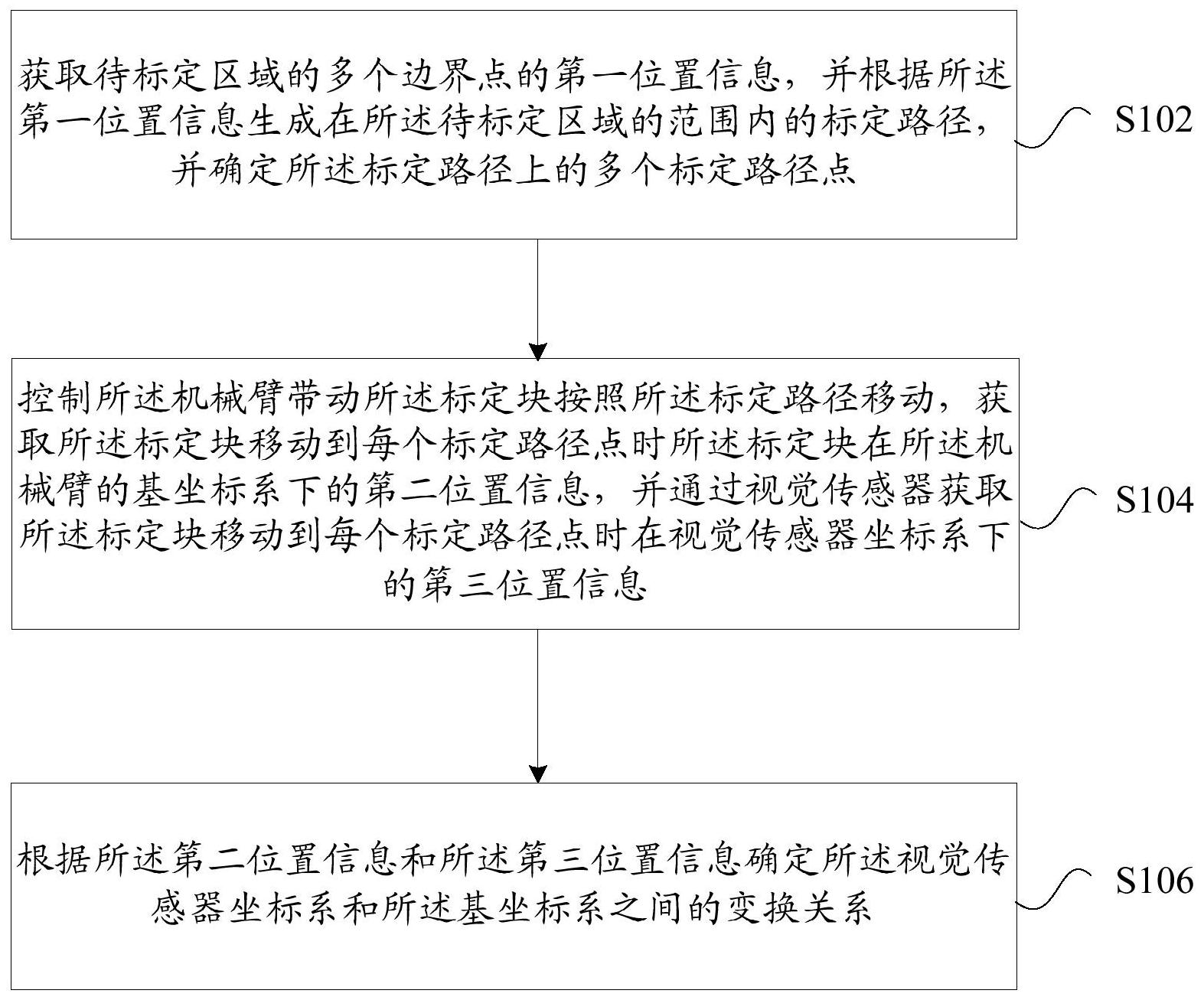
本发明实施例提供了一种机械臂的标定方法、装置、系统及存储介质,以至少解决 相关技术中的手眼标定过程标定效率较低的问题。 根据本发明的一个实施例,提供了一种机械臂的标定方法,应用于包括法兰且在 法兰末端安装有标定块的机械臂,所述方法包括:获取待标定区域的多个边界点的第一位 置信息,根据所述第一位置信息生成在所述待标定区域的范围内的标定路径,并确定所述 标定路径上的多个标定路径点;控制所述机械臂带动所述标定块按照所述标定路径移动, 获取所述标定块移动到每个标定路径点时所述标定块在所述机械臂的基坐标系下的第二 位置信息,并通过视觉传感器获取所述标定块移动到每个标定路径点时所述标定块在视觉 传感器坐标系下的第三位置信息;根据所述第二位置信息和所述第三位置信息确定所述视 觉传感器坐标系和所述基坐标系之间的变换关系。 在至少一个示例性实施例中,获取待标定区域的多个边界点的第一位置信息包 括:控制所述机械臂带动所述标定块移动到所述待标定区域的所述多个边界点,并分别采 集所述机械臂带动所述标定块移动到所述多个边界点时的法兰位置作为所述第一位置信 息。 在至少一个示例性实施例中,根据所述第一位置信息生成在所述待标定区域的范 围内的标定路径,并确定所述标定路径上的多个标定路径点包括:在所述多个边界点中确 定起点和终点,并在所述待标定区域的范围内生成一条从所述起点到所述终点的无碰撞的 5 CN 111590593 A 说 明 书 2/11 页 连续的标定路径;在所述标定路径上选取多个标定路径点,并根据所述第一位置信息和标 定路径点选取间隔确定所述多个标定路径点的第四位置信息。 在至少一个示例性实施例中,获取所述标定块移动到每个标定路径点时所述标定 块在所述机械臂的基坐标系下的第二位置信息包括:在所述机械臂带动所述标定块移动到 每个标定路径点时,采集所述机械臂的法兰位置;根据所述法兰位置和坐标系偏移距离确 定所述标定块在所述基坐标系下的第二位置信息,其中,所述坐标系偏移距离为标定块坐 标系的原点相对于法兰坐标系的原点的偏移距离。 在至少一个示例性实施例中,根据所述法兰位置和坐标系偏移距离确定所述标定 块在所述基坐标系下的第二位置信息包括:对于每个标定路径点,按照以下公式根据当前 标定路径点对应的所述法兰位置 和坐标系偏移距离x0,y0,z0确定所述标定 块在所述基坐标系下的第二位置信息ai(x,y,z): 其中,c·表示cos(·),s·表示sin(·),x0,y0,z0分别为所述标定块坐标系的原点 相对于所述法兰坐标系的原点在x、y、z轴下的偏移距离,i=1,2,...,k,k为所述多个标定 路径点的总数。 在至少一个示例性实施例中,通过视觉传感器获取所述标定块移动到每个标定路 径点时所述标定块在视觉传感器坐标系下的第三位置信息包括:在所述标定块移动到每个 标定路径点时,通过所述视觉传感器提取所述标定块在预定平面上的中心点的位置作为所 述标定块移动到每个标定路径点时所述标定块在视觉传感器坐标系下的第三位置信息bi (x,y,z),i=1,2,...,k,k为所述多个标定路径点的总数。 在至少一个示例性实施例中,根据所述第二位置信息和所述第三位置信息确定所 述视觉传感器坐标系和所述基坐标系之间的变换关系包括:根据R=VUT确定所述视觉传感 器坐标系和所述基坐标系之间的旋转矩阵R,并根据t=b-Ra确定所述视觉传感器坐标系和 所述基坐标系之间的平移向量t, 其中, ai表示所述标定块移动到第i个标定路径点时所述 标定块在所述基坐标系下的第二位置信息ai(x,y,z),bi表示所述标定块移动到第i个标定 路径点时所述标定块在所述视觉传感器坐标系下的第三位置信息bi(x,y ,z),V和U分别是 对矩阵 依据H=UΛVT进行矩阵分解得到的矩阵,T表示对矩阵进行转置,a’i= ai-a,b’i=bi-b,k为所述多个标定路径点的总数。 根据本发明的另一个实施例,提供了一种机械臂的标定装置,应用于包括法兰且 在法兰末端安装有标定块的机械臂,包括:标定路径规划模块,设置为获取待标定区域的多 个边界点的第一位置信息,根据所述第一位置信息生成在所述待标定区域的范围内的标定 路径,并确定所述标定路径上的多个标定路径点;位置计算模块,设置为控制所述机械臂带 动所述标定块按照所述标定路径移动,获取所述标定块移动到每个标定路径点时所述标定 6 CN 111590593 A 说 明 书 3/11 页 块在所述机械臂的基坐标系下的第二位置信息,并通过视觉传感器获取所述标定块移动到 每个标定路径点时所述标定块在视觉传感器坐标系下的第三位置信息;标定结果计算模 块,设置为根据所述第二位置信息和所述第三位置信息确定所述视觉传感器坐标系和所述 基坐标系之间的变换关系。 根据本发明的又一个实施例,提供了一种机械臂的标定系统,包括机械臂、标定 块、视觉传感器和计算装置,其中,所述机械臂包括法兰且在法兰末端安装有所述标定块, 所述机械臂和所述计算装置之间、所述视觉传感器和所述计算装置之间具有有线或无线通 信连接;所述计算装置设置为:获取待标定区域的多个边界点的第一位置信息,根据所述第 一位置信息生成在所述待标定区域的范围内的标定路径,并确定所述标定路径上的多个标 定路径点;控制所述机械臂带动所述标定块按照所述标定路径移动,获取所述标定块移动 到每个标定路径点时所述标定块在所述机械臂的基坐标系下的第二位置信息,并通过视觉 传感器获取所述标定块移动到每个标定路径点时所述标定块在视觉传感器坐标系下的第 三位置信息;根据所述第二位置信息和所述第三位置信息确定所述视觉传感器坐标系和所 述基坐标系之间的变换关系。 在至少一个示例性实施例中,所述计算装置设置为通过以下方式获取待标定区域 的多个边界点的第一位置信息:控制所述机械臂带动所述标定块移动到所述待标定区域的 所述多个边界点,并分别采集所述机械臂带动所述标定块移动到所述多个边界点时的法兰 位置作为所述第一位置信息。 在至少一个示例性实施例中,所述计算装置设置为通过以下方式获取所述标定块 移动到每个标定路径点时所述标定块在所述机械臂的基坐标系下的第二位置信息:在所述 机械臂带动所述标定块移动到每个标定路径点时,采集所述机械臂的法兰位置;根据所述 法兰位置和坐标系偏移距离确定所述标定块在所述基坐标系下的第二位置信息,其中,所 述坐标系偏移距离为标定块坐标系的原点相对于法兰坐标系的原点的偏移距离。 在至少一个示例性实施例中,所述计算装置设置为通过以下方式通过视觉传感器 获取所述标定块移动到每个标定路径点时所述标定块在视觉传感器坐标系下的第三位置 信息:在所述标定块移动到每个标定路径点时,通过所述视觉传感器提取所述标定块在预 定平面上的中心点的位置作为所述标定块移动到每个标定路径点时所述标定块在视觉传 感器坐标系下的第三位置信息bi(x,y,z),i=1,2,...,k,k为所述多个标定路径点的总数。 根据本发明的再一个实施例,还提供了一种计算机可读存储介质,所述计算机可 读存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行上述任一项 方法实施例中的步骤。 根据本发明的再一个实施例,还提供了一种电子装置,包括存储器和处理器,所述 存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述任一项 方法实施例中的步骤。 通过本发明,由于基于待标定区域生成了标定路径,并选取了标定路径上的多个 标定路径点,再控制机械臂带动标定块按照标定路径移动,移动过程中获取标定块到达每 个标定路径点时所述标定块在所述机械臂的基坐标系下的第二位置信息和在视觉传感器 坐标系下的第三位置信息,并据此确定所述视觉传感器坐标系和所述基坐标系之间的变换 关系,因此,可以解决相关技术中的手眼标定过程标定效率较低的问题,在进行标定的过程 7 CN 111590593 A 说 明 书 4/11 页 中不需要人工操作机械臂,机械臂会按照规划出的路径自动运动并采集位置信息,操作过 程简单,标定效率高。 附图说明 图1是根据本发明实施例的机械臂的标定方法的流程图; 图2是根据本发明实施例的机械臂的标定装置的结构框图; 图3是根据本发明实施例的机械臂的标定系统的示意图; 图4是根据本发明实施例的待标定区域内的标定路径的示意图 图5是根据本发明实施例的机械臂标定方案的流程图。











