
技术摘要:
一种扭矩波动补偿装置可以包括:扭矩测量单元,被配置为输出通过MDPS系统的扭矩传感器测量的扭矩;马达速度测量单元,被配置为输出通过MDPS马达的位置传感器测量的马达速度;控制单元,被配置为基于所述马达速度信息和测量的扭矩信息分别输出偏移信号和扭矩波动信号; 全部
背景技术:
车辆的MDPS系统使用辅助动力源提供一部分转向扭矩,驾驶员在转向车辆时需要 将该部分转向扭矩施加于方向盘,从而使驾驶员能够容易地进行转向。 MDPS系统通过下述确定车辆的行驶条件:柱扭矩传感器,其配置为测量输入到方 向盘的驾驶员的柱扭矩;转向角传感器,其配置为测量方向盘的转向角或转向角速度;以及 车速传感器,其配置为测量车速;并且MDPS系统在驾驶员操作方向盘时基于应用到转向轴 的柱扭矩通过电动马达(MDPS马达)提供辅助扭矩。 通常,MDPS马达作为3相AC马达而被实现,并且MDPS系统的电子控制单元(ECU)接 收通过反馈输出到MDPS马达的三相中的电流,并通过比例积分(PI)控制来控制逆变器输出 3相AC电流,以控制MDPS马达的驱动。但是,当驱动MDPS马达时,由于基于转子磁极数或定子 槽数的机械结构,可能会发生扭矩波动或机械振动。由于这种马达扭矩波动降低了MDPS系 统的NVH(噪声,振动,苛刻性(Harshness))性能,因此需要改进。 作为防止这种扭矩波动的方法,通常使用基于查找表补偿扭矩波动、使用系统传 递函数和滤波器来补偿扭矩波动,或基于扭矩传感器补偿扭矩波动的方法。 但是,基于查找表的马达(MDPS马达)控制方法——其中通过特定离线实验提取的 参数用于马达控制——可以轻松应用于MDPS马达控制,但是,存在这样的问题:参数提取可 能需要单独的测试时间,并且由于系统分布而可能出现性能偏差。 此外,主动干扰补偿方法使用干扰观测器来估计和补偿在MDPS系统中发生的扭矩 波动(机械振动)。干扰观测器使用滤波器和正常系统的逆传递函数来估计系统的集总干 扰,并且干扰观测器的性能根据滤波器的设计而决定。此时,当将滤波器设计为低通滤波器 来估计以三角函数形式生成的扭矩波动时,可能会发生幅度减小和相位延迟。 当如基于扭矩传感器的扭矩波动补偿方法中那样使用高通滤波器去除扭矩传感 器的偏移时,需要额外的操作以校正高频信号的失真。此外,尽管执行了信号校正,但是可 能难以恢复原始信号。此外,通过积分进行参数估计需要较长的收敛时间,并且需要附加的 算法来阻止积分信号的发散。 因此,需要一种能够减少扭矩波动而不会引起上述问题的方法。 本公开的相关技术在2016年8月19日公开的标题为“用于车辆的MDPS系统和方法” 4 CN 111591340 A 说 明 书 2/7 页 的韩国专利申请公开号10-2016-0098890中公开。
技术实现要素:
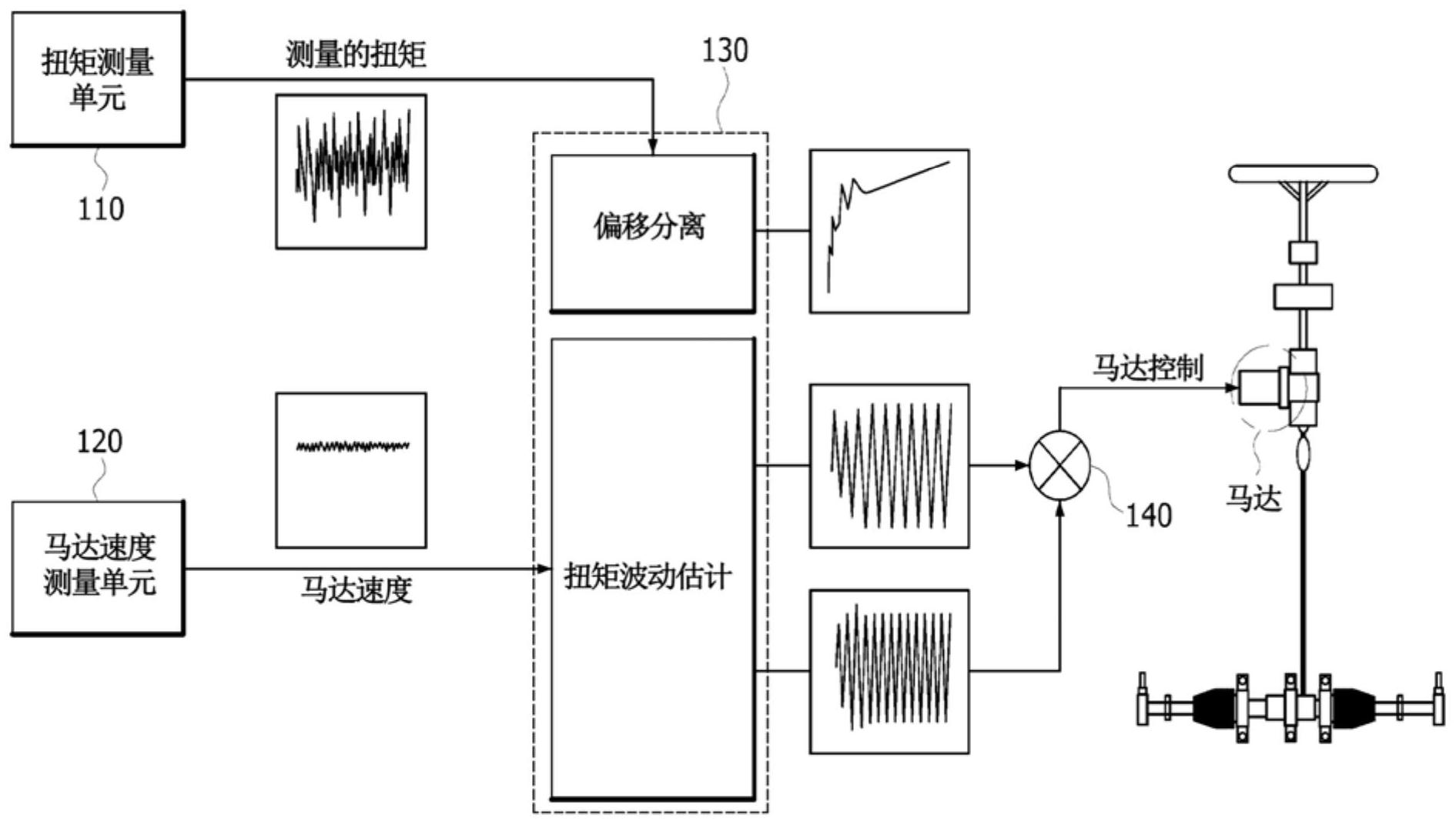
各种实施方式涉及一种扭矩波动补偿装置和方法,用于减小在驱动车辆的MDPS (马达驱动动力转向)系统的马达时出现的扭矩波动。 在一个实施方式中,扭矩波动补偿装置可以包括:扭矩测量单元,被配置为输出通 过MDPS系统的扭矩传感器测量的扭矩;马达速度测量单元,被配置为输出通过MDPS马达的 位置传感器测量的马达速度;控制单元,被配置为基于所述马达速度信息和所测量的扭矩 信息分别输出偏移信号和扭矩波动信号;和扭矩波动补偿单元,被配置为合成从所述控制 单元输出的多个扭矩波动信号,并且将扭矩波动补偿信号作为马达控制信号输出到所述 MDPS马达,所述扭矩波动补偿信号用于补偿所合成的扭矩波动信号。 扭矩波动信号可以至少包括初级扭矩波动信号和次级扭矩波动信号。 控制单元可以包括:波动频率生成单元,被配置为利用所述马达速度产生扭矩波 动频率;扭矩信号模型应用单元,被配置为通过将扭矩信号模型应用于所述扭矩波动频率 来生成所述扭矩波动频率的扭矩波动估计信号;扭矩估计单元,被配置为从所述产生的扭 矩波动估计信号估计波动扭矩,并输出所述估计扭矩;扭矩差计算单元,被配置为通过比较 由扭矩估计单元估计的波动扭矩和由扭矩测量单元获取的测量扭矩来计算波动扭矩和测 量扭矩之间的差;增益应用单元,被配置为将由增益设置单元设置的增益与所计算出的扭 矩差相乘,并输出相乘结果;以及扭矩波动元件输出单元,被配置为将由所述增益应用单元 而应用了所述增益的信号应用到所述估计信号,并生成包括所有扭矩波动元件的校正后的 估计信号。 可以在每个指定的控制周期中采样并生成所测扭矩信号和波动频率。 扭矩信号模型可以是矩阵模型,并且可以根据在制作矩阵模型时设置的顺序来区 分偏移、扭矩波动1和扭矩波动2。 扭矩波动元件可以包括偏移、扭矩波动1和扭矩波动2。 扭矩波动补偿装置可以将校正后的估计信号反馈到扭矩信号模型应用单元,以将 校正后的估计信号反映到扭矩估计值的计算中。 在一个实施方式中,扭矩波动补偿方法可以包括:输出通过MDPS系统的扭矩传感 器测量的扭矩;输出通过MDPS马达的位置传感器测量的马达速度;由控制单元基于马达速 度信息和测量的扭矩信息分别输出偏移信号和扭矩波动信号;以及通过扭矩波动补偿单元 合成从所述控制单元输出的多个扭矩波动信号,并且将扭矩波动补偿信号作为马达控制信 号输出到所述MDPS马达,所述扭矩波动补偿信号用于补偿所合成的扭矩波动信号。 所述分别输出偏移信号和扭矩波动信号可以包括通过控制单元:利用所述马达速 度产生扭矩波动频率;通过将扭矩信号模型应用于所述扭矩波动频率来产生扭矩波动频率 的扭矩波动估计信号;从产生的扭矩波动估计信号估计扭矩,并输出估计扭矩;通过比较估 计的波动扭矩和测量的扭矩来计算所述估计的波动扭矩和所述测量的扭矩之间的差;将预 设增益乘以计算出的扭矩差,并输出相乘结果;和通过将增益应用信号应用于估计信号来 生成包括所有扭矩波动元件的校正后的估计信号。 扭矩信号模型可以是矩阵模型,并且可以根据在制作矩阵模型时设置的顺序来区 5 CN 111591340 A 说 明 书 3/7 页 分偏移、扭矩波动1和扭矩波动2。 扭矩波动元件可以包括偏移、扭矩波动1和扭矩波动2。 扭矩波动补偿方法可以进一步包括反馈校正后的估计信号以将扭矩信号模型应 用于扭矩波动频率,以便将校正后的估计信号反映到扭矩估计值的计算中。 根据权利要求9所述的扭矩波动补偿方法,其中,测量的扭矩信号 用偏移和扭矩 波动模型化,如下等式1所示: 其中常数a0代表偏移,三角函数aisin(Niθm φi)代表所述扭矩波动,其中i=1, 2,…,n,θm代表马达旋转角,Niθm代表相对于所述马达旋转角的谐波分量,并且ai和φi分别 代表所述扭矩波动的幅度和相位。 在每个指定的控制周期中采样并生成测量扭矩信号和波动频率。 根据本公开的实施方式,扭矩波动补偿装置和方法可以减小在驱动车辆的MDPS系 统的马达时发生的扭矩波动。 此外,扭矩波动补偿装置和方法可以通过扭矩波动补偿来改善低速时的转向感 觉。 此外,扭矩波动补偿装置和方法可以应用于实时扭矩波动补偿逻辑,而无需单独 的补偿参数提取过程。 附图说明 图1是示出了根据本公开的实施方式的扭矩波动补偿装置的示意性构造的图。 图2是示出了图1中控制单元的详细构造的图。 图3至图5示出了通过使用根据图1中的本公开的实施方式的扭矩波动补偿装置进 行模拟而获得的结果。











