
技术摘要:
本发明公开了一种气味垃圾清理方法、计算机设备及存储介质,属于智能家居技术领域。本发明中,云平台根据房屋中的多个气味传感器所检测的环境气味浓度值获取数值较大的三个环境气味浓度值,进而获取三个环境气味浓度值所对应的三个气味传感器的坐标,进一步根据三个气 全部
背景技术:
在有婴幼儿或宠物的家庭中,婴幼儿或宠物时常会在主人不注意的时候制造气味 垃圾,如大小便,有时甚至会在主人难以发现的地方制造气味垃圾。当婴幼儿或宠物在主人 不注意的时候或在主人难以发现的地方制造气味垃圾时,主人难以做到及时清理,影响家 庭卫生,降低生活舒适感。
技术实现要素:
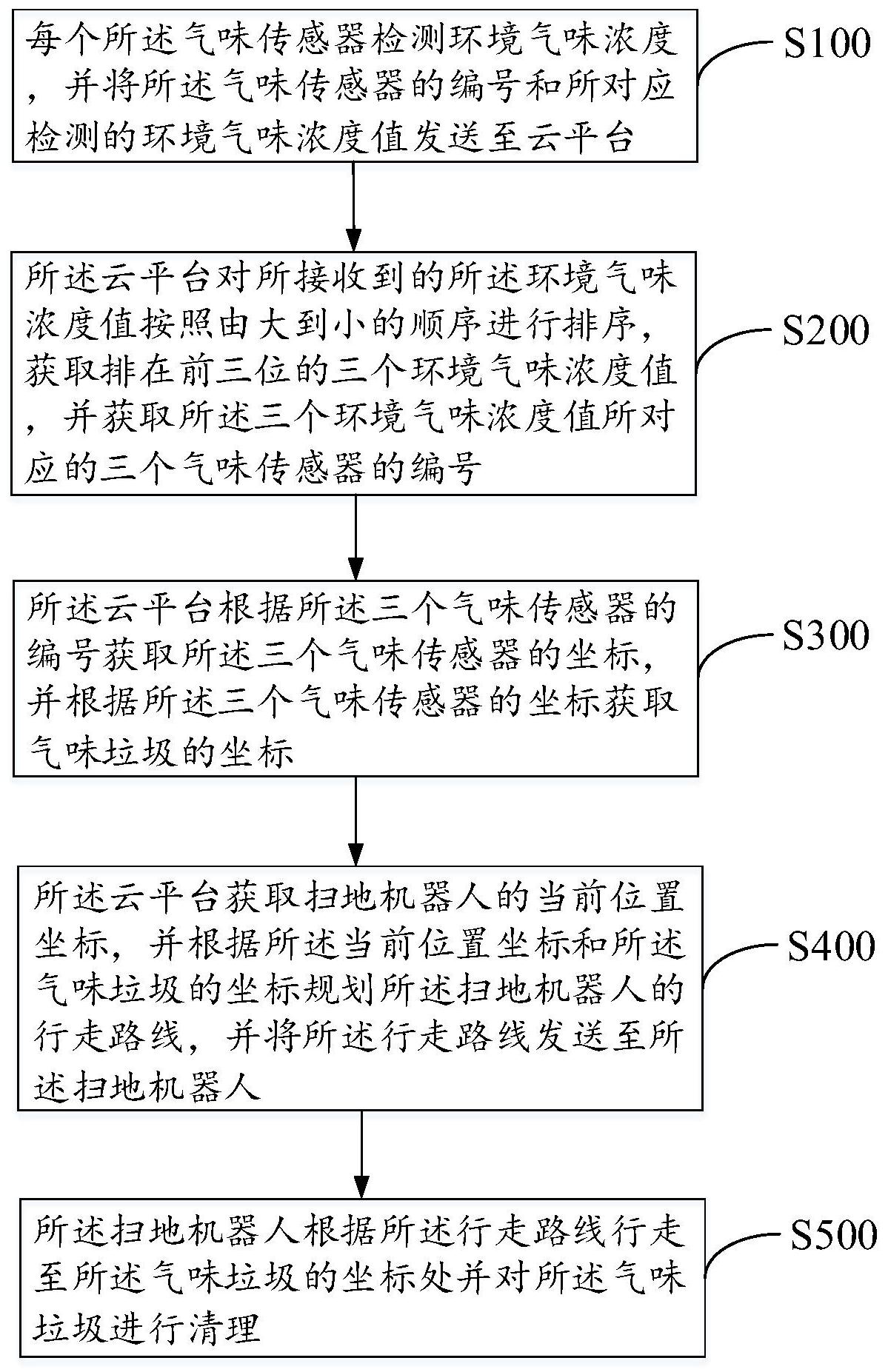
本发明主要提供一种气味垃圾清理方法,以解决现有的家庭中主人难以及时发现 婴幼儿或宠物制造的气味垃圾造成影响家庭卫生、降低用户生活舒适感的问题。 为解决上述技术问题,本发明采用的一个技术方案是:提供一种气味垃圾清理方 法,在房屋中按照预设密度安装有多个气味传感器,所述气味垃圾清理方法包括: 每个所述气味传感器检测环境气味浓度,并将所述气味传感器的编号和所对应检 测的环境气味浓度值发送至云平台; 所述云平台对所接收到的所述环境气味浓度值按照由大到小的顺序进行排序,获 取排在前三位的三个环境气味浓度值,并获取所述三个环境气味浓度值所对应的三个气味 传感器的编号; 所述云平台根据所述三个气味传感器的编号获取所述三个气味传感器的坐标,并 根据所述三个气味传感器的坐标获取气味垃圾的坐标; 所述云平台获取扫地机器人的当前位置坐标,并根据所述当前位置坐标和所述气 味垃圾的坐标规划所述扫地机器人的行走路线,并将所述行走路线发送至所述扫地机器 人; 所述扫地机器人根据所述行走路线行走至所述气味垃圾的坐标处并对所述气味 垃圾进行清理。 优选地,所述每个所述气味传感器检测环境气味浓度,并将所述气味传感器的编 号和所对应检测的环境气味浓度值发送至云平台的步骤之前,所述气味垃圾清理方法还包 括: 扫描设备扫描获取房屋信息,并将所述房屋信息发送至云平台; 所述云平台根据所述房屋信息生成所述房屋的房屋地图图像,并基于所述房屋地 图图像建立房屋坐标系。 优选地,所述云平台预先存储有每个所述气味传感器基于所述房屋坐标系的坐 标,以及每个所述气味传感器的编号与坐标的对应表,所述云平台根据所述三个气味传感 器的编号获取所述三个气味传感器的坐标的步骤具体包括以下步骤: 4 CN 111596003 A 说 明 书 2/6 页 所述云平台根据所述三个气味传感器的编号从所述对应表中查询获取所述三个 气味传感器的坐标。 优选地,所述根据所述三个气味传感器的坐标获取气味垃圾的坐标的步骤具体包 括以下步骤: 分别向所述三个气味传感器发送气味垃圾距离探测请求; 接收所述三个气味传感器分别所返回的气味垃圾距离; 根据所述三个气味传感器的坐标、三个所述气味垃圾距离以及三边定位算法获取 气味垃圾的坐标。 优选地,所述云平台获取扫地机器人的当前位置坐标的步骤之前还包括以下步 骤: 所述云平台将所述房屋地图图像以及所述房屋坐标系发送至所述扫地机器人。 优选地,所述云平台获取扫地机器人的当前位置坐标的步骤具体包括以下步骤: 所述云平台发送位置获取请求至所述扫地机器人; 所述扫地机器人根据所述房屋地图图像和所述房屋坐标系并基于环境地图模型 匹配定位方法获取自身的当前位置坐标; 所述扫地机器人将所述当前位置坐标发送至所述云平台。 优选地,所述扫地机器人根据所述行走路线行走至所述气味垃圾的坐标处并对所 述气味垃圾进行清理的步骤具体包括以下步骤: 所述扫地机器人根据所述行走路线行走至所述气味垃圾的坐标处,并对以所述气 味垃圾的坐标为中心的预设区域范围内的垃圾进行清理。 为解决上述技术问题,本发明采用的另一个技术方案是:提供一种气味垃圾清理 方法,在房屋中按照预设密度安装有多个气味传感器,所述气味垃圾清理方法应用于云平 台,所述气味垃圾清理方法包括: 接收每个所述气味传感器所发送的所述气味传感器的编号和所对应检测的环境 气味浓度值; 对所接收到的所述环境气味浓度值按照由大到小的顺序进行排序,获取排在前三 位的三个环境气味浓度值,并获取所述三个环境气味浓度值所对应的三个气味传感器的编 号; 根据所述三个气味传感器的编号获取所述三个气味传感器的坐标,并根据所述三 个气味传感器的坐标获取气味垃圾的坐标; 获取扫地机器人的当前位置坐标,并根据所述当前位置坐标和所述气味垃圾的坐 标规划所述扫地机器人的行走路线,并将所述行走路线发送至所述扫地机器人,以使所述 扫地机器人根据所述行走路线行走至所述气味垃圾的坐标处并对所述气味垃圾进行清理。 为解决上述技术问题,本发明采用的另一个技术方案是:提供一种计算机设备,所 述计算机设备包括处理器以及存储器,所述处理器耦合所述存储器,所述处理器在工作时 执行存储器中所存储的指令以实现上述的气味垃圾清理方法。 为解决上述技术问题,本发明采用的另一个技术方案是:提供一种存储介质,其上 存储有计算机程序,所述计算机程序被处理器执行以实现上述的气味垃圾清理方法。 本发明的有益效果是:区别于现有技术的情况,本发明中,云平台根据房屋中的多 5 CN 111596003 A 说 明 书 3/6 页 个气味传感器所检测的环境气味浓度值获取数值较大的三个环境气味浓度值,进而获取三 个环境气味浓度值所对应的三个气味传感器的坐标,进一步根据三个气味传感器的坐标获 取气味垃圾的坐标;云平台获取扫地机器人的当前位置坐标,进而根据扫地机器人的当前 位置坐标和气味垃圾的坐标规划扫地机器人的行走路线,以使扫地机器人根据该行走路线 行走至气味垃圾出对气味垃圾进行自动清理。本发明中可根据气味传感器所检测的环境气 味浓度值自动定位气味垃圾所在位置,并使扫地机器人行走至气味垃圾处进行气味垃圾清 理,可实现对气味垃圾的及时清理,及时改善用户居住环境,提升用户居住舒适感。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图,其中: 图1是本发明一实施例提供的气味垃圾清理方法的流程图; 图2是本发明另一实施例提供的气味垃圾清理方法的流程图; 图3是本发明另一实施例提供的气味垃圾清理方法的流程图; 图4是本发明另一实施例提供的计算机设备的结构示意图; 图5是本发明另一实施例提供的存储介质的结构示意图。











