
技术摘要:
本发明公开了一种焊缝检测定位方法,本发明基于图像识别的深度学习模型,结合一个多项式回归的数据拟合模型,从而实现了焊缝检测和定位的功能;减小了数据标注的难度,降低了最终计算设备的性能指标要求;本发明可以自动识别焊缝的位置,不需要人为介入参与,同时还大 全部
背景技术:
在离散制造业中诸如保温杯,水杯的制造过程中,有一道外表面抛光的工艺。该工 艺其中的一个重点是将上一工序中焊接导致的接缝痕迹抛光消除,从而达到美观的效果。 由于杯子本身材质有差异,焊接工艺和条件有差异,会导致该焊缝的具体呈现有很大的多 样性,给机器自动化的定位焊缝带来困难。 目前的典型解决方案是,让工厂工人人眼识别该焊缝位置,并进行黑色标记笔的 标注,然后通过色标传感器来识别焊缝的位置。该方案在实际运行过程中仍然遇到了识别 率上的挑战(对于那些本身颜色就很深的杯子来说,识别非常困难),并且还会多耗费一个 人力成本。
技术实现要素:
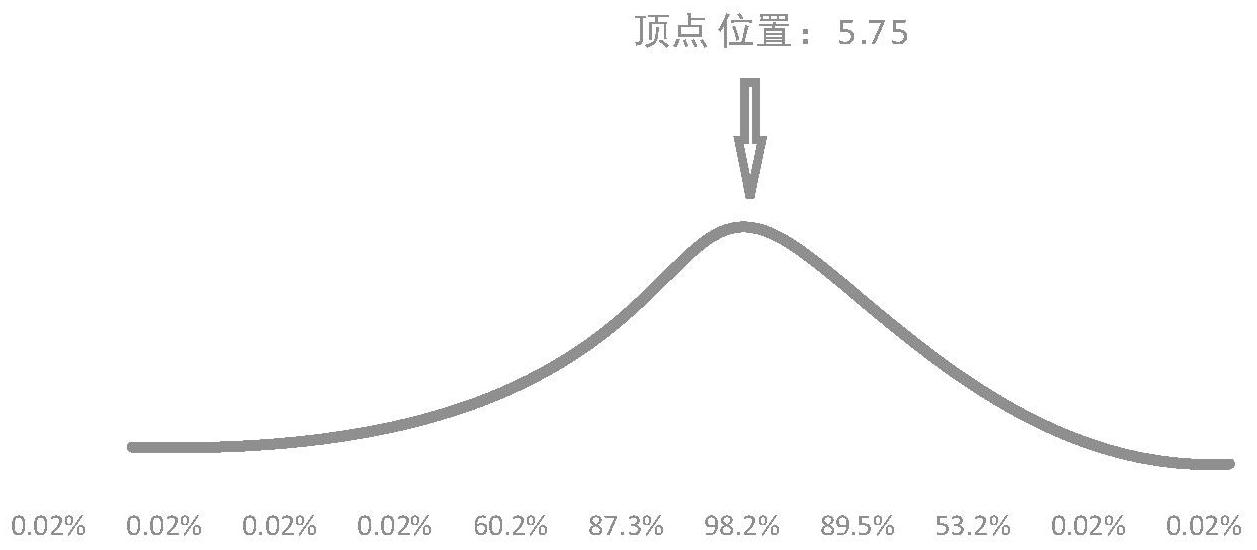
为了解决上述存在的问题,本发明提供了一种焊缝检测定位方法。 为了实现上述目的,本发明采用以下技术方案: 一种焊缝检测定位方法,包括以下步骤: (1)利用工业相机采集杯子外表面原始图片信息; (2)将杯子外表面的原始图片进行切割,得到多个一连串的图片数据,并将该一连 串的图片数据送入图像识别的模型,获得对应的一连串的焊缝概率数据; (3)将这一连串的焊缝概率数据送入多项式回归模型y=ax2 bx c进行训练,求得 参数a、b、c,得到多项式回归模型,其中,y为焊缝概率数据,x为一连串图片数据的索引坐 标; (4)根据得到的多项式回归模型,可以得到多项式的顶点坐标(x_top,y_top),该 坐标即为焊缝位置的索引坐标; (5)将x_top换算成机械装置转动的角度信息,然后将角度信息返回给控制台,控 制杯子转动到目标角度,即找到了焊缝位置;角度信息表示从起始位置开始,转动多少度可 以找到焊缝的位置。 进一步地,图像识别的模型为经过深度学习模型训练之后得到的,具体为:深度学 习模型用已知的焊缝图片进行训练,获得图像识别的模型,图像识别的模型输出一个图片 主体内容为焊缝的概率。 进一步地,步骤(2)中,将原始图片按照200x200,每100像素的格式进行切割。 进一步地,步骤(3)中,x具体为步骤(2)中切割原始图片之后得到的一批图片按照 位置关系排列的一连串图片数据的索引坐标。 进一步地,步骤(5)中,将x_top换算成机械装置转动的角度信息的公式:x_top/ 3 CN 111612730 A 说 明 书 2/3 页 len_x*360*2,其中len_x为总共的图片数量。 本发明的有益效果是: (1)本发明可以自动识别焊缝的位置,不需要人为介入参与,节省了人力成本的同 时还大大增加了识别的准确率,提高了生产效率;本发明采用了图片识别(非图像定位)的 深度学习神经网络,大大降低了模型的神经网络的复杂度,从而降低了标注成本,训练成 本,以及最终的控制方案硬件成本。 (2)本发明提供了一个基于图像识别的深度学习模型,结合一个多项式回归的数 据拟合模型,从而实现了图像检测和定位的功能;减小了数据标注的难度,降低了最终计算 设备的性能指标要求,从而最大程度上降低成本。 附图说明 图1为本发明的图片切割示意图。 图2为深度学习模型训练之后,获得的焊缝概率分布图。 图3为多项式回归之后求得顶点位置的示意图。











