
技术摘要:
本发明提供一种摄像机稳定装置,包括支撑部、外环、内环、第一稳定电机、姿态传感器、稳定部以及控制器。所述内环用于固定摄像机,所述外环沿第一轴线套设于所述内环外,所述外环还沿第二轴线与所述支撑部转动连接。所述稳定部用于控制所述外环相对于所述支撑部的姿态 全部
背景技术:
现有技术中摄像机稳定装置(又称为云台),多采用如陀螺仪等姿态传感器配合驱 动电机传动来实现摄像机的增稳功能。为了保证姿态传感器的感应精度,姿态传感器多与 摄像机之间固定连接,并基于姿态传感器的实时姿态传感来反向控制驱动电机工作,保证 摄像机稳定装置维持摄像机的姿态稳定。 姿态传感器感应的实时姿态需要与摄像机稳定装置的控制器电性连接以传输数 据。为了保证数据传输速率和带宽,现有技术中大多采用有线传输的方式来实现姿态传感 器与控制器之间的通信。这样的有线连接方式会导致摄像机在稳定装置内的转动角度受 限,其无法在摄像机稳定装置内实现360度及以上的角度旋转。在一些特殊的拍摄场景下, 摄像师受限于摄像机的转动角度而无法开展预设的摄影操作,导致拍摄难度增加。
技术实现要素:
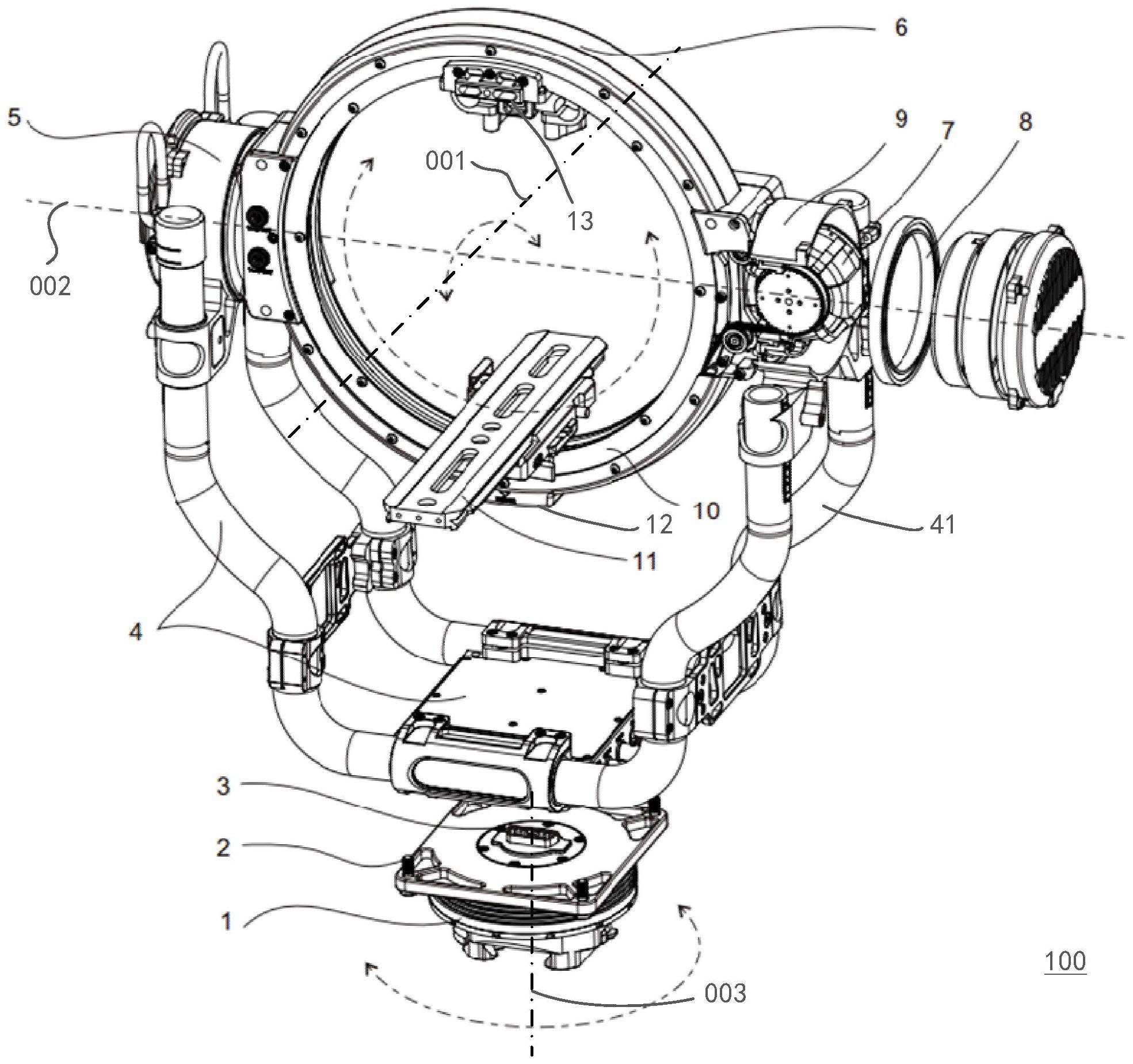
本申请的目的在于克服现有技术的不足,提供一种允许摄像机任意角度旋转的摄 像机稳定装置,具体包括如下技术方案: 一种摄像机稳定装置,包括: 支撑部; 外环,沿第一轴线呈回转体,且与所述支撑部沿第二轴线转动连接,所述第一轴线 与所述第二轴线非平行设置; 内环,沿所述第一轴线旋转连接于所述外环内,所述内环上还设有用于固定连接 摄像机的基座; 第一稳定电机,固定于所述外环且与所述内环传动连接; 姿态传感器,固定于所述外环或所述支撑部上,用于感应所述外环或所述支撑部 的空间姿态; 稳定部,固定于所述支撑部且与所述外环传动连接,所述稳定部用于驱动所述外 环相对于所述支撑部转动以维持所述外环的姿态稳定; 控制器,分别与所述第一稳定电机、所述姿态传感器和所述稳定部电性连接,所述 控制器同时基于所述姿态传感器所感应的空间姿态,以及所述稳定部驱动所述外环的转动 角度,以解算出所述内环相对于所述外环的转动姿态,进而控制所述第一稳定电机驱动所 述内环转动以维持所述摄像机的姿态稳定。 其中,所述第一轴线垂直于所述第二轴线。 其中,所述支撑部包括支撑架,所述稳定部包括与所述支撑架固定连接的第二稳 定电机,所述外环沿所述第二轴线与所述支撑架转动连接并同时与所述第二稳定电机传动 4 CN 111594723 A 说 明 书 2/8 页 连接。 其中,所述支撑架包括沿所述第二轴线分列所述外环两侧且分别与所述外环转动 连接的支耳,所述第二稳定电机固定于其中一个所述支耳上。 其中,所述第一稳定电机收容于所述支撑架未固定所述第二稳定电机的另一所述 支耳内。 其中,所述姿态传感器固定于所述外环上。 其中,在沿所述第二轴线的方向上,所述姿态传感器分别与两个所述支耳之间的 距离相等。 其中,所述支撑部还包括沿第三轴线与所述支撑架转动连接的底座,所述稳定部 还包括第三稳定电机,所述第三轴线分别与所述第一轴线和所述第二轴线非平行设置,所 述第三稳定电机固定于所述底座上且与所述支撑架传动连接,或 所述第三稳定电机固定于所述支撑架上且与所述底座传动连接,所述第三稳定电 机用于维持所述支撑架的姿态稳定。 其中,所述第一轴线与所述第二轴线相互垂直,且所述第三轴线同时垂直于所述 第一轴线和所述第二轴线。 其中,所述姿态传感器固定于所述支撑架或所述底座上。 其中,所述第三稳定电机以可拆卸的形式固定于所述底座或所述支撑架上,且所 述底座与所述支撑架可以直接固定连接。 本申请还涉及一种摄像机稳定装置控制方法,包括如下步骤: 通过姿态传感器感应外环或支撑部的空间姿态,并同步获取所述外环或所述支撑 部在维持姿态稳定过程中经稳定部驱动的转动角度; 基于所述空间姿态和所述转动角度解算出内环相对于所述外环的转动姿态; 基于所述转动姿态控制第一稳定电机驱动所述内环相对于所述外环转动以维持 与所述内环固定连接的摄像机的姿态稳定。 其中,所述稳定部包括第二稳定电机和第三稳定电机,所述支撑部还包括支撑架 和底座,所述第二稳定电机用于维持所述外环相对于所述支撑架的姿态稳定,所述第三稳 定电机用于维持所述支撑架相对于所述底座的姿态稳定,所述同步获取所述外环或所述支 撑部在维持姿态稳定过程中经稳定部驱动的转动角度,还包括: 同步获取所述外环在维持姿态稳定过程中经所述第二稳定电机驱动的第二转动 角度,以及所述支撑架在维持姿态稳定过程中经所述第三稳定电机驱动的第三转动角度。 本申请提供的摄像机稳定装置,通过所述内环来固定所述摄像机,并通过所述外 环以及固定于所述外环上的第一稳定电机来维持所述内环相对于所述外环的姿态稳定。进 一步的,本申请提供的摄像机稳定装置还通过所述支撑部和所述稳定部的配合来维持所述 外环的姿态稳定。所述姿态传感器被设置于所述外环或所述支撑部上,使得所述内环与所 述外环之间的转动角度不受限制,可以实现任意角度的转动。另一方面,本申请摄像机稳定 装置还同时基于所述姿态传感器感应到的所述外环或所述支撑部的空间姿态,以及所述稳 定部驱动所述外环维持姿态稳定时转动的角度,来解算出所述内环相对于所述外环的转动 姿态,进而控制所述第一稳定电机驱动所述内环转动以维持所述摄像机的姿态稳定。本申 请摄像机稳定装置在实现摄像机增稳功能的同时,解放了摄像机相对于稳定装置的旋转自 5 CN 111594723 A 说 明 书 3/8 页 由度,可以实现360度旋转甚至多圈连续旋转场景下的稳定拍摄操作,拓展了摄像机的应用 范围。 而本申请提供的摄像机稳定装置控制方法,也因为采用了与上述摄像机稳定装置 类似的姿态传感器的设置方式,并通过联合解算来确定所述内环相对于所述外环的转动姿 态,达到维持所述摄像机姿态稳定的同时解放摄像机旋转自由度的效果。 附图说明 为了更清楚地说明本发明实施例的技术方案,下面将对实施方式中所需要使用的 附图作简单地介绍,显而易见地,下面描述中的附图是本发明一些实施方式,对于本领域普 通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。 图1是本发明提供的一实施例摄像机稳定装置的结构示意图; 图2是本发明提供的一实施例摄像机稳定装置控制方法的流程图; 图3是本发明提供的另一实施例的摄像机稳定装置控制方法的流程图。











