
技术摘要:
本发明公开一种管道检测机器人,包括运动机构和检测机构。本发明的机构主要包括底板、四个组合杆、两个前轮胎、两个后轮胎、第一齿条、第二齿条、第一齿轮、第二齿轮、驱动电机、传动轴、差速器、差速器支撑架、两个万向节、舵机、两根半轴、两个齿轮支撑架、两根齿轮 全部
背景技术:
国内城市的排水管道经过长时间的使用,开始出现老化和腐蚀等问题。如果才用 开挖管道进行检查和维修,将严重影响城市居民的正常生活。若不采取开挖的方式,通常采 用管道检测技术,由于管道年久失修,目前现有的管道检测机器人面对恶劣复杂的管道环 境,有的并不能顺利通过一些阻碍,当遇到一些内径较小的管道时,机器人便不能平稳的运 行,甚至一些体积较大的机器人在转弯时都面临着很大的问题。
技术实现要素:
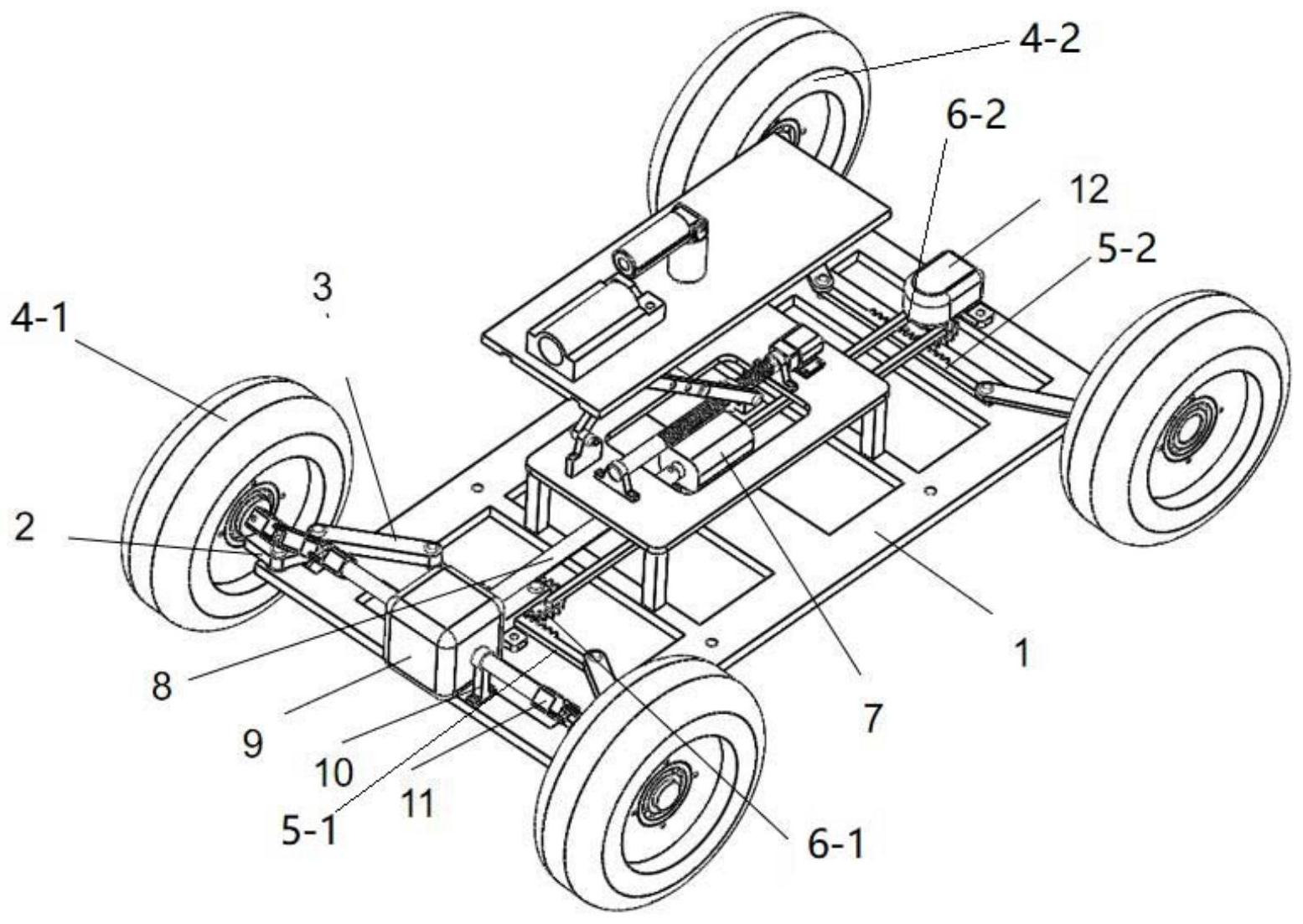
本发明的目的在于提供给一种管道检测机器人,以解决现有技术中操作难度以及 实验误差等技术问题。 为达到上述目的,本发明所采取的技术方案是: 一种管道检测机器人,包括运动机构和检测机构;所述运动机构包括底板、四个组合 杆、两个前轮胎、两个后轮胎、第一齿条、第二齿条、第一齿轮、第二齿轮、驱动电机、传动轴、 差速器、差速器支撑架、两个万向节、舵机、两根半轴、两个齿轮支撑架和两根齿轮连杆;两 个所述前轮胎对称设置在底板前端两侧;两个所述后轮胎对称设置在底板后端两侧,所述 第一齿条两端分别通过一组合杆与所述前轮胎连接,所述第二齿条两端分别通过一组合杆 与所述后轮胎连接,每个所述组合杆均与底板铰接,两个所述齿轮支撑架固定设置在底板 的前后两端,所述第一齿轮与位于底板前端的齿轮支撑架铰接,所述第二齿轮与位于底板 后端的齿轮支撑架铰接,且所述第一齿轮与所述第一齿条啮合连接,所述第二齿轮与所述 第二齿条啮合连接,所述第一齿轮和第二齿轮之间连接有两根平行设置的齿轮连杆,所述 舵机固定在底板后端,并且舵机的输出轴与第二齿轮相连接;所述差速器置于底板前端,差 速器两侧输出轴分别与两个半轴的一端相连接,两个所述半轴的另一端分别与两个万向节 的一端连接,两个所述万向节的另一端与前轮胎圆轴固定连接;所述驱动电机安装于底板 中部,所述传动轴一端连接驱动电机输出轴,传动轴另一端与差速器输入轴连接; 所述检测机构包括隔板、伸缩机构、平台、检测探头和照明灯:所述隔板通过支架固定 在底板上方,所述伸缩机构固定设置在隔板上,且所述伸缩机构的伸缩端与所述平台底部 连接,所述照明灯和检测探头安装在平台上。 优选地,所述组合杆包括v型杆和连杆,所述v型杆的一端与前轮胎或后轮胎连接, v型杆另一端与连杆的一端通过销轴铰接,v型杆中间与所述底板铰接,所述连杆的另一端 与第一齿条或第二齿条的一端铰接。 优选地,所述伸缩机构包括丝杠支撑块、丝杠、螺母、伸缩杆支撑块、电机、两根伸 缩杆和两个滑块,所述丝杠支撑块和电机分别固定在隔板两端,所述伸缩杆支撑块固定在 隔板上,且位于丝杠支撑块一侧;所述丝杠的两端分别与丝杠支撑块和电机的输出轴相连 4 CN 111578039 A 说 明 书 2/3 页 接,所述螺母套设在丝杠上,与丝杠螺纹连接,所述平台的底部设有凹槽,两个所述滑块滑 动连接在凹槽内,两根伸缩杆中,一根的下端与伸缩杆支撑块铰接,上端与平台底部设置的 一个滑块通过销轴铰接,另一根的下端与所述螺母铰接,上端与平台的底部设置的另一个 滑块通过销轴铰接,两根所述伸缩杆互相交叉设置,且交叉部分通过销轴铰接。 优选地,所述第一齿轮和第二齿轮的端面上均设有两个对称设置的通孔,两根所 述齿轮连杆两端均设有一根短轴,且所述短轴与所述齿轮连接垂直设置,所述齿轮连杆两 端分别通过短轴与所述第一齿轮和第二齿轮端面的通孔配合连接。 优选地,所述第一齿轮和第二齿轮的端面位于同一水平面,且所述第一齿轮和第 二齿轮的端面均与所述底板平行。 与现有技术相比,本发明的有益效果是: 1.本发明改进了转向系统,大大缩小了机器人的转弯半径,对错综复杂管道有更强的 适应能力; 2.本发明通过丝杠螺母带动伸缩杆往复运动,无论面对内径较大或者较小的管道时, 都能将检测探头保持在最佳的高度完成工作; 3.本发明中机器人前部和后部运动结构大体相同,无论是前进或是后退,运动状态都 是一样的,操纵起来更加简便。 附图说明 图1是本发明的整体结构图; 图2是本发明的转向原理图; 图3是本发明的升降装置结构图。 图中:底板1、v型杆2、连杆3、前轮胎4-1、后轮胎4-2、第一齿条5-1、第二齿条5-2、 第一齿轮6-1、第二齿轮6-2、驱动电机7、传动轴8、差速器9、差速器支撑架10、万向节11、舵 机12、半轴13、齿轮支撑架14、齿轮连杆15、隔板16、支撑块17、丝杠18、螺母19、伸缩杆支撑 块20、电机21、伸缩杆22、滑块23、平台24、检测探头25、照明灯26。











