
技术摘要:
本发明提供了一种割草机队管理装置、管理方法以及管理系统,所述割草机队管理装置,用以控制若干割草机协同工作,每台割草机设置有车载通信模块以及车载定位导航模块,包括:地图加载模块,所述地图加载模块用以获取工作地块的地图;控制端通信模块,所述控制端通信模 全部
背景技术:
割草机是一种用于修剪草坪、植被等的园林工具,通常包括自走机构、割刀机构以 及动力源,所述动力源可以是汽油机、电池包等等。电池驱动式割草机因为噪声低、零污染 而广受用户的喜爱。然而,由于电池能量密度、电池生产成本等因素的制约,割草机所携带 的电池包的电量十分有限,从而导致割草机的一次作业面积偏小。当草坪面积较广时,用户 需要多组电池包进行轮换才能实现不间断工作。尽管如此,用户仍需要消耗很长的时间才 能完成草坪修剪。如果使用多台割草机同时工作,则需要多名操作工同时工作。如此,则推 高了人力成本。 鉴于上述问题,有必要提供一种割草机队管理装置,以解决上述问题。
技术实现要素:
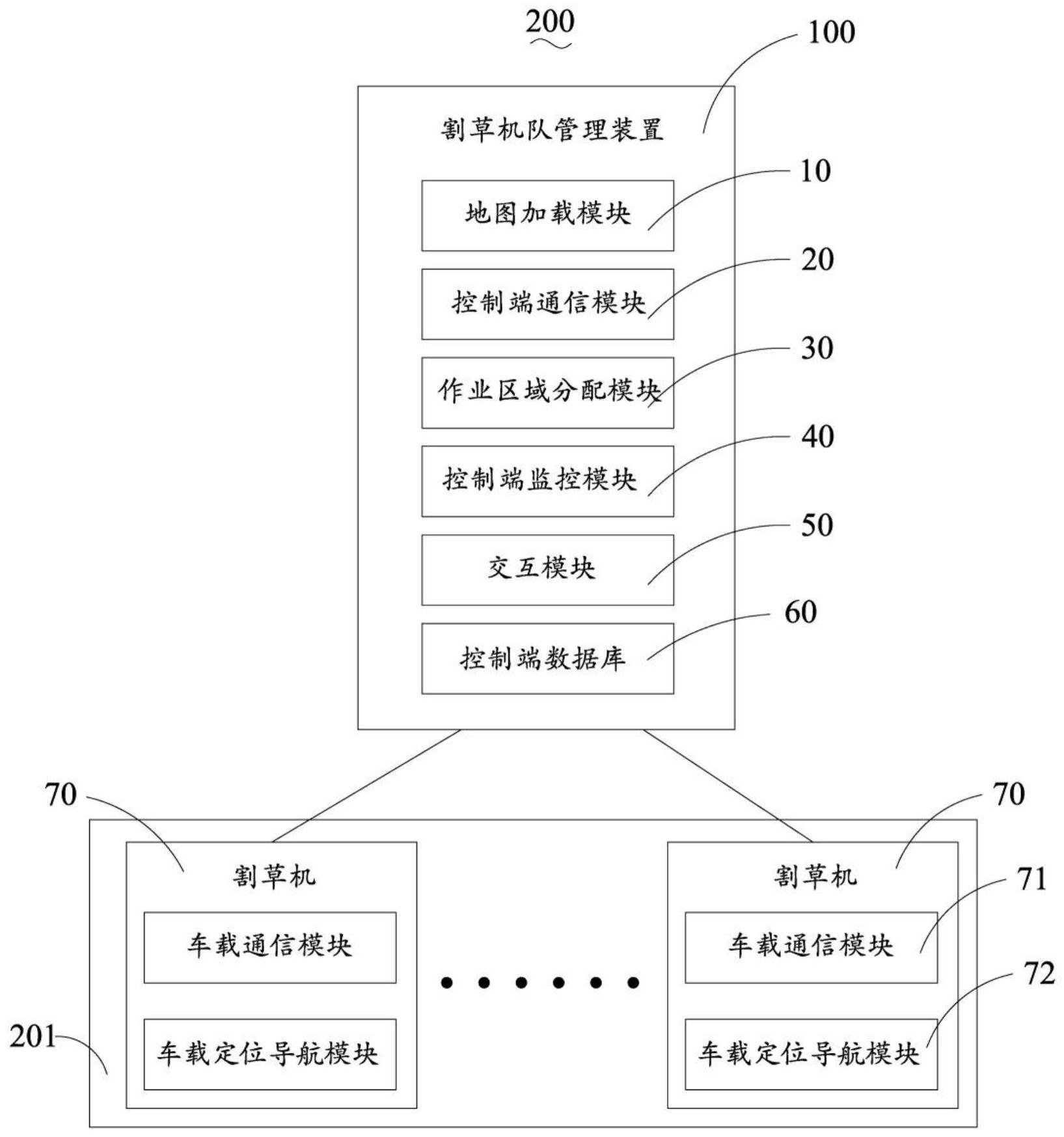
本发明的目的在于提供一种割草机队管理装置,该割草机队管理装置能够控制若 干无人驾驶割草机协同工作,从而有效提升了作业效率,降低了人力成本。 为实现上述目的,本发明提供了一种割草机队管理装置,用以控制若干割草机协 同工作,每台割草机设置有车载通信模块以及车载定位导航模块,包括:地图加载模块,所 述地图加载模块用以获取工作地块的地图,以供所述车载定位导航模块使用;控制端通信 模块,所述控制端通信模块与所述车载通信模块进行无线通信,以获取所述割草机的状态 信息或者向所述割草机发送控制命令;所述状态信息包括割草机的电池组件电量、车速以 及割草宽度;以及作业区域分配模块,所述作业区域分配模块根据所述状态信息、地图为每 台割草机分配作业区域;每台割草机的车载定位导航模块根据分配的作业区域引导割草机 在对应的作业区域工作。 作为本发明的进一步改进,所述地图加载模块包括位置采集单元以及地图生成单 元;所述位置采集单元用以采集工作地块的坐标信息;所述地图生成单元根据所述坐标信 息生成工作地块的边界曲线,并拟合成工作地块的地图。 作为本发明的进一步改进,所述工作地块的坐标信息包括工作地块边界的坐标信 息以及位于所述工作地块内障碍物边界的坐标信息。 作为本发明的进一步改进,所述地图生成单元判断所述边界曲线是否为闭合曲 线;若是,则所述地图生成单元根据所述边界曲线拟合为工作地块的地图;若否,则所述地 图生成单元发出提示信息,以提醒工作人员完成工作地块的位置信息采集。 作为本发明的进一步改进,所述作业区域分配模块包括作业面积评估单元以及路 径生成单元;所述作业面积评估单元根据所述状态信息评估每台割草机的作业面积;所述 路径生成单元根据评估的作业面积以及工作地块的地图生成作业路径。 作为本发明的进一步改进,当所有割草机的评估作业面积之和小于所述工作地块 5 CN 111612342 A 说 明 书 2/8 页 的面积时,所述作业区域分配模块发出提示信息。 作为本发明的进一步改进,所述割草机队管理装置还设置有交互模块;当所有割 草机的评估作业面积之和小于所述工作地块的面积时,用户通过所述交互模块控制所述控 制端通信模块与队列之外的割草机的车载通信模块建立通信联系,以将队列之外的割草机 添加至队列内。 作为本发明的进一步改进,所述割草机队管理装置还设置有交互模块;当所有割 草机的评估作业面积之和小于所述工作地块的面积时,用户通过所述交互模块在所述工作 地块的地图上选择优先工作地块区域;所述割草机队管理装置控制割草机队在所述优先工 作地块区域内工作。 作为本发明的进一步改进,所述割草机队管理装置还设置有控制端监控模块,以 监控每台割草机的运行信息;当任意割草机发生故障时,所述割草机队管理装置发出提示 信息。 作为本发明的进一步改进,当发生故障的割草机排除故障时,所述割草机队管理 装置重新引导故障排除后的割草机至对应的作业区域内工作。 作为本发明的进一步改进,割草区域部分重叠的两台割草机之间设置有安全距 离,以使得当位于前面的割草机发生故障停止运行时,位于后面的割草机可以在安全距离 内进行减速直至停止,避免两者因靠得太近而发生碰撞。 本发明还提供了一种割草机队管理方法,用以控制若干割草机协同工作,包括如 下步骤:S1:获取工作地块的地图以及所述割草机的状态信息,所述状态信息包括割草机电 池组件电量、车速以及割草宽度;S2:根据所述状态信息、地图为每台割草机分配作业区域, 并引导每台割草机在对应的作业区域内工作。 作为本发明的进一步改进,所述步骤S1还包括如下步骤:S11:获取工作地块的坐 标信息;S12:根据所述坐标信息生成工作地块的边界曲线;S13:根据所述边界曲线拟合生 成工作地块的地图。 作为本发明的进一步改进,所述步骤S11还包括如下步骤:S111:获取工作地块边 界的坐标信息;S112:获取工作地块内障碍物边界的坐标信息。 作为本发明的进一步改进,所述步骤S12还包括:判断所述边界曲线是否为闭合曲 线;若是,则跳转至步骤S13;否则,跳转至步骤S11。 作为本发明的进一步改进,所述步骤S2包括如下步骤:S21:根据每台割草机的状 态信息评估每台割草机的作业面积;S22:根据每台割草机的评估作业面积、工作地块的地 图生成每台割草机的作业路径。 作为本发明的进一步改进,所述步骤S21还包括如下步骤:S211:评估每台割草机 的作业面积;S212:判断所有割草机的评估作业面积之和是否不小于所述工作地块的面积; 若是,则跳转至步骤S22;S213:判断是否需要增加队列之外的割草机;若是,将队列之外的 割草机添加至当前队列,并跳转至步骤S211。 作为本发明的进一步改进,所述步骤S21还包括步骤S214:用户从工作地块的地图 中选择优先工作地块区域。 作为本发明的进一步改进,所述割草机队管理装置还包括步骤S3:监控每台割草 机的运行信息,并控制割草机执行与所述运行信息相对应的操作。 6 CN 111612342 A 说 明 书 3/8 页 作为本发明的进一步改进,所述运行信息为故障信息;当割草机发生故障时,所述 割草机停止工作并发出提示信息。 作为本发明的进一步改进,当队列中任意一台割草机完成对应作业区域工作且该 割草机尚有多余电量时,引导该割草机至故障割草机对应的作业区域进行工作。 作为本发明的进一步改进,所述运行信息为电池组件电量;当割草机的电池组件 电量不足且尚未完成工作、或者割草机完成工作时,引导割草机至预设地点进行充电或更 换电池组件。 本发明还提供了一种割草机队管理系统,包括:割草机队列,所述割草机队列包括 若干台割草机,每台割草机设置有车载通信模块以及车载定位导航模块;以及割草机队管 理装置,所述割草机队管理装置包括:地图加载模块,所述地图加载模块用以获取工作地块 的地图,以供所述车载定位导航模块使用;控制端通信模块,所述控制端通信模块与所述车 载通信模块进行通信,以获取所述割草机的状态信息或者向所述割草机发送控制命令;所 述状态信息包括割草机的电池组件电量、车速以及割草宽度;以及作业区域分配模块,所述 作业区域分配模块根据所述状态信息、地图为每台割草机分配作业区域;每台割草机的车 载定位导航模块根据分配的作业区域引导割草机在对应的作业区域工作。 本发明的有益效果是:本发明割草机队管理装置能够控制若干无人驾驶割草机协 同工作,从而有效提升了作业效率,降低了人力成本。 附图说明 图1是本发明割草机队管理系统的模块示意图。 图2是本发明割草机队管理装置的模块示意图。 图3是独立作业模式的作业路径示意图。 图4是跟随作业模式的作业路径示意图。 图5是本发明割草机队管理系统的另一实施方式的示意图。 图6是本发明割草机的模块示意图。 图7是本发明割草机队管理方法的流程示意图。











