
技术摘要:
本发明涉及一种基于幅度变化分析的车载毫米波雷达遮挡检测方法,包括:分别获取异物直接覆盖条件下和无异物直接覆盖条件下的毫米波雷达多个通道的时域回波信号的1D‑FFT幅度变化趋势的差异特征,根据该1D‑FFT幅度变化趋势的差异特征与当前时刻的毫米波雷达多个通道的 全部
背景技术:
随着自动驾驶技术的发展,越来越多的车型开始配车载毫米波雷达,通过其超越 人类本身的感知能力实现自适应巡航控制(Adaptive Cruise Control)、前碰撞预警 (Forward Collision Warning)、自动紧急制动(Autonomous Emergency Braking)、盲区检 测(Blind Spot Detection BSD)、变道辅助(Lane Change Assistance LCA)、前、后方交叉 预警(Forward/Rear Cross Traffic Alert RCTA)、后碰撞预警(Rear Collision Warning RCW)与开门预警(Door Open Warning DOW)等功能,不仅可以通过灯光预警等方式提醒驾 驶员注意潜在威胁,甚至可以参与车身控制,规避潜在危险。 但是,车载毫米波雷达在装车使用过程中,毫米波雷达正前方的第二表面(车身或 车标)表面容易被积雪、泥土或其他物体覆盖,即表征为雷达被遮挡,其结果为雷达对目标 的检测性能受损,严重遮挡时,雷达对目标的检测功能甚至会直接失效,使雷达系统不能为 本车提供或提供错误的环境感知信息与决策,存在行车危险。 针对此问题,现有的大多遮挡检测算法的实现方法为,从信号处理角度,通过观察 雷达对环境目标做CFAR(Constant False Alarm Rate)检测的直观结果,进而判断毫米波 雷达是否被遮挡,在一定情况下,这种方法确实有效,但在绝对空旷环境里或毫米波雷达紧 邻目标物体时,易产生遮挡检测误报警。 而即使是在绝对空旷环境里或毫米波雷达紧邻目标物体时,雷达在有无遮挡条件 下,其时域信号对应一维快速傅里叶变换(1Dimension-Fast Fourier Transformation, 1D-FFT)的幅值变化均有较大差异。 基于此,本发明以应用FMCW的车载毫米波雷达为研究基础,提出通过对其各通道 信号的1D-FFT的幅度变化趋势进行分析的优化方法,对毫米波雷达的遮挡情况进行判断, 从而实现车载毫米波雷达的遮挡自诊断功能。
技术实现要素:
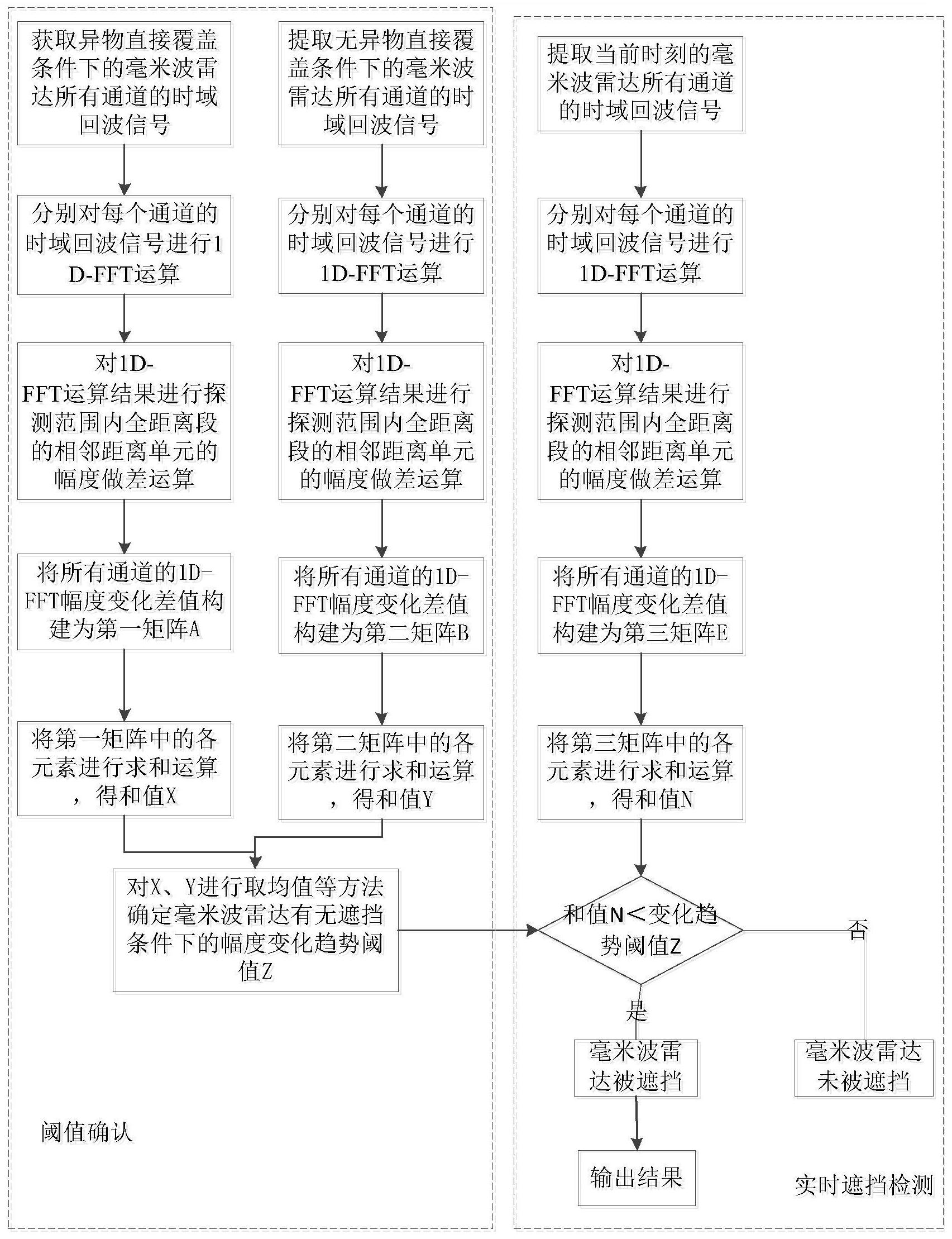
本发明为克服上述现有技术所述的不足,提供一种基于幅度变化分析的车载毫米 波雷达遮挡检测方法。 为解决上述技术问题,本发明的技术方案如下: 一种基于幅度变化分析的车载毫米波雷达遮挡检测方法,包括如下步骤: 分别获取异物直接覆盖条件下的毫米波雷达多个通道的时域回波信号的1D-FFT 幅度做差结果所构建成的第一矩阵和无异物直接覆盖条件下的毫米波雷达多个通道的时 域回波信号的1D-FFT幅度变化差值所构建成的第二矩阵; 分别根据第一矩阵和第二矩阵获取表征毫米波雷达有异物直接覆盖和无异物直 4 CN 111580108 A 说 明 书 2/5 页 接覆盖情况下的1D-FFT幅度变化趋势的差异特征,并根据表征毫米波雷达有异物直接覆盖 和无异物直接覆盖情况下的1D-FFT幅度变化趋势的差异特征以确定毫米波雷达有无遮挡 条件下的幅度变化趋势阈值; 获取当前时刻的毫米波雷达多个通道的时域回波信号的1D-FFT幅度变化差值所 构建成的第三矩阵,根据第三矩阵获取体现当前实际毫米波雷达遮挡状态下1D-FFT幅度变 化趋势的差异特征; 判断第三矩阵获取体现当前实际毫米波雷达遮挡状态下1D-FFT幅度变化趋势的 差异特征是否小于毫米波雷达有无遮挡条件下的幅度变化趋势阈值,若是,则判断毫米波 雷达被遮挡,否则,毫米波雷达未被遮挡。 进一步的,作为优选技术方案,第一矩阵的获取具体包括: 提取异物直接覆盖条件下的毫米波雷达多个通道的时域回波信号; 分别对每个通道的时域回波信号进行1D-FFT运算,并对1D-FFT运算结果进行探测 范围内全距离段或一定距离段的相邻距离单元的幅度做差运算,以得到异物直接覆盖条件 下的毫米波雷达每个通道的时域回波信号的1D-FFT幅度变化特征区别信息; 将多个通道的1D-FFT幅度变化差值构建为第一矩阵。 进一步的,作为优选技术方案,第二矩阵的获取具体包括: 提取无异物直接覆盖条件下的毫米波雷达多个通道的时域回波信号; 分别对每个通道的时域回波信号进行1D-FFT运算,并对1D-FFT运算结果进行探测 范围内全距离段或一定距离段的相邻距离单元的幅度做差运算,以得到无异物直接覆盖条 件下的毫米波雷达每个通道的时域回波信号的1D-FFT幅度变化特征区别信息; 将多个通道的1D-FFT幅度变化差值构建为第二矩阵。 进一步的,作为优选技术方案,有异物直接覆盖情况下的1D-FFT幅度变化趋势的 差异特征的获取具体包括: 将第一矩阵中的各元素进行求和运算,所述第一矩阵中的各元素的第一和值即为 有异物直接覆盖情况下的1D-FFT幅度变化趋势的差异特征。 进一步的,作为优选技术方案,无异物直接覆盖情况下的1D-FFT幅度变化趋势的 差异特征的获取具体包括: 将第二矩阵中的各元素进行求和运算,所述第二矩阵中的各元素的第二和值即为 无异物直接覆盖情况下的1D-FFT幅度变化趋势的差异特征。 进一步的,作为优选技术方案,毫米波雷达有无遮挡条件下的幅度变化趋势阈值 的确定具体包括: 分别对有异物直接覆盖和无异物直接覆盖情况下的1D-FFT幅度变化趋势的差异 特征取均值,根据均值或者依据雷达系统对遮挡报警的误报率与漏报率要求确定毫米波雷 达有无遮挡条件下的幅度变化趋势阈值。 进一步的,作为优选技术方案,第三矩阵的获取具体包括: 提取当前时刻的毫米波雷达多个通道的时域回波信号; 分别对每个通道的时域回波信号进行1D-FFT运算,并对1D-FFT运算结果进行探测 范围内全距离段或一定距离段的相邻距离单元的幅度做差运算,以得到当前时刻的毫米波 雷达每个通道的时域回波信号的1D-FFT幅度变化特征区别信息; 5 CN 111580108 A 说 明 书 3/5 页 将多个通道的1D-FFT幅度变化差值构建为第三矩阵。 进一步的,作为优选技术方案,体现当前实际毫米波雷达遮挡状态下1D-FFT幅度 变化趋势的差异特征的获取具体包括: 将第三矩阵中的各元素进行求和运算,所述第三矩阵中的各元素的和值即为体现 当前实际毫米波雷达遮挡状态下1D-FFT幅度变化趋势的差异特征。 进一步的,作为优选技术方案,还包括将毫米波雷达被遮挡的判断结果进行相应 输出。 与现有技术相比,本发明技术方案的有益效果是: 本发明通过对毫米波雷达的各通道时域回波信号的1D-FFT的幅度变化趋势进行 分析,以对毫米波雷达的遮挡情况进行判断,从而有效地实现了车载毫米波雷达的遮挡状 况检测,同时,该方法对算力要求较低,在保证了车载毫米波雷达系统对环境的实时感知的 同时,也满足车载毫米波雷达自诊断功能的实时性。 附图说明 图1为本发明方法步骤流程图。 图2为本发明有无遮挡状态下的幅度变化情况示意图。 附图仅用于示例性说明,不能理解为对本专利的限制;为了更好说明本实施例,附 图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说, 附图中某些公知结构及其说明可能省略是可以理解的;相同或相似的标号对应相同或相似 的部件;附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制。











