
技术摘要:
本公开提供了一种可抛投式球形机器人,包括壳体组件、支撑减震组件以及驱动底盘组件;壳体组件为中空的球体形状;支撑减震组件和驱动底盘组件放置于壳体组件内部;其中,驱动底盘组件设有驱动轮和配重块,支撑减震组件设有支撑轮;支撑轮和驱动轮上下相对设置;支撑减 全部
背景技术:
球形机器人的研究长期以来一直是国内外机器人领域研究的热点之一。该类机器 人能够在复杂的非结构环境中稳定地行走,可以代替人完成许多危险作业,比如遇到地震 等自然灾害,每次地震完之后就会有不少房屋坍塌,这时候需要救援部队来进行人员的施 救。但是在地底下深层的一些难民还是很难找到。一方面搜索人员存在人身安全隐患,另一 方面由于空间有限,搜索人员无法展开搜救任务。而球形机器人尺寸小,运动灵活,可以协 助搜索人员开展搜救工作。此外,球形机器人还能够代替人们来进行侦察任务,或者在对一 些具有危险程度的犯罪分子进行打击时,可以将球形机器人投入到犯罪分子的建筑物内, 并且对室内的所有情况进行相应的拍摄。 总之,球形机器人在军事、矿山开采、核能工业、星球表面探测、消防及营救、建筑 业、示教娱乐等行业有着许多潜在的应用前景。它有球形或近似球形的外壳,其他机构、器 件都封装在球壳内,阻止了外部环境对部件造成伤害;当机器人发生碰撞或从高处跌落时, 球形的外壳使运动姿态易于调整和回复,不会发生“翻到”情况。与传统的轮式、足式移动机 器人相比,球形机器人更适用于潮湿、多尘、崎岖的复杂环境。 现有的球形机器人中存在以下不足,例如结构复杂、整机体积大、运动灵活性差以 及平衡控制难等问题。
技术实现要素:
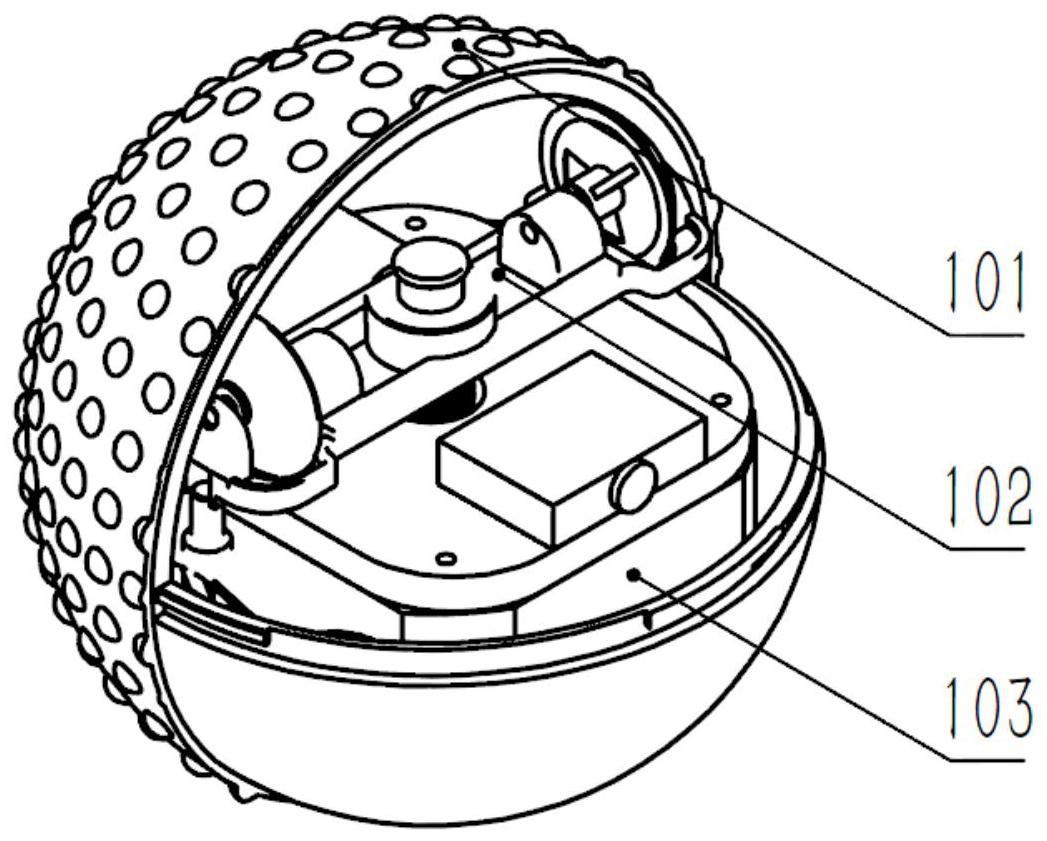
为了解决或者至少缓解上述技术问题中的至少一个,本公开提供了一种可抛投式 球形机器人,结构紧凑,运动平衡与稳定性好。 根据本公开的一个方面,一种可抛投式球形机器人,包括壳体组件、支撑减震组件 以及驱动底盘组件; 所述壳体组件为中空的球体形状;所述支撑减震组件和所述驱动底盘组件放置于 所述壳体组件内部;其中,所述驱动底盘组件设有驱动轮和配重块,所述支撑减震组件设有 支撑轮;所述支撑轮和所述驱动轮上下相对设置;所述支撑减震组件和所述驱动底盘组件 之间通过导向槽配合连接,使所述驱动轮和所述支撑轮之间的距离能够变动;且所述支撑 减震组件的弹力使所述驱动轮和所述支撑轮压紧抵靠在所述壳体组件的内壁; 所述配重块用于使所述驱动底盘组件保持在所述支撑减震组件的下方;所述驱动 轮通过摩擦力带动所述壳体组件向前滚动。 根据本公开的至少一个实施方式,所述支撑减震组件还包括支撑架、导向柱、减震 弹簧和导向套;所述导向柱滑动安装在所述支撑架的中心孔中,所述导向套固定套设在所 述导向柱上,所述减震弹簧套设在所述导向套上;所述支撑轮安装在所述支撑架上;所述导 向槽设置在所述驱动底盘组件上,所述导向柱与所述导向槽配合连接。 3 CN 111547151 A 说 明 书 2/6 页 根据本公开的至少一个实施方式,所述支撑架沿直线方向延伸,所述中心孔位于 所述支撑架的中间位置;所述支撑架的两端分别安装一个所述支撑轮。 根据本公开的至少一个实施方式,所述支撑架的两端分别设有轮轴支座,所述支 撑轮的轮轴转动安装在所述轮轴支座上。 根据本公开的至少一个实施方式,所述支撑轮与所述壳体组件的内壁接触的表面 呈锥形面。 根据本公开的至少一个实施方式,所述驱动底盘组件还包括驱动底盘支架、驱动 电机固定座、驱动电机以及齿轮传动机构;所述驱动电机固定座固定在所述驱动底盘支架 上,所述驱动电机固定在所述驱动电机固定座上;所述驱动底盘支架的相对两侧分别通过 驱动轮轴固定一个所述驱动轮;所述驱动电机通过所述齿轮传动机构与所述驱动轮连接, 驱动所述驱动轮转动;所述配重块固定在所述驱动底盘支架的底部。 根据本公开的至少一个实施方式,所述齿轮传动机构包括大齿轮和小齿轮,所述 小齿轮与所述驱动电机的输出轴固定连接,所述大齿轮与所述驱动轮同心固定连接;所述 小齿轮与所述大齿轮啮合传动;所述驱动电机包括一体设置的行星齿轮变速箱,所述输出 轴为所述行星齿轮变速箱的输出轴。 根据本公开的至少一个实施方式,所述驱动轮轴上固定有定位轴套,以定位所述 驱动轮的轴向位置。 根据本公开的至少一个实施方式,所述驱动底盘组件还包括编码器、固定架、无线 充电模块、控制电路板以及音视频回传模块;所述驱动电机与所述编码器相连;所述无线充 电模块通过所述固定架固定在所述驱动电机固定座上,且所述无线充电模块环绕在所述配 重块周围;所述控制电路板固定在所述驱动底盘支架上,所述控制电路板与所述音视频回 传模块相连。 根据本公开的至少一个实施方式,所述壳体组件包括球形橡胶套、上半球壳体以 及下半球壳体;所述上半球壳体和所述下半球壳体通过卡扣相连形成中空的球体形状;所 述球形橡胶套包覆在所述上半球壳体和所述下半球壳体外部;且所述球形橡胶套的外表面 设有多个具有弹性的凸起。 附图说明 附图示出了本公开的示例性实施方式,并与其说明一起用于解释本公开的原理, 其中包括了这些附图以提供对本公开的进一步理解,并且附图包括在本说明书中并构成本 说明书的一部分。 图1是本公开可抛投式球形机器人的示例性实施方式的立体结构示意图。 图2是本公开中壳体组件的示例性实施方式的立体结构示意图。 图3是本公开中支撑减震组件的示例性实施方式的立体结构示意图。 图4是本公开中驱动底盘组件的示例性实施方式的立体结构示意图,其中的上下 方位与机器人处于正常工作姿态时的方位相反。 附图说明: 101-壳体组件;102-支撑减震组件;103-驱动底盘组件;201-防震橡胶套;202-上 半球壳体;203-下半球壳体;301-支撑架;302-导向柱;303-减震弹簧;304-导向套;305-支 4 CN 111547151 A 说 明 书 3/6 页 撑轮;401-驱动底盘支架;402-驱动电机固定座;403-小齿轮;404-驱动电机;405-编码器; 406-定位轴套;407-大齿轮;408-配重块;409-无线充电模块;410-固定架;411-驱动轮; 412-驱动轮轴;413-控制电路板;414-音视频回传模块。











