
技术摘要:
本发明涉及一种基于隔离开关位置智能识别的一键顺控双确认系统及方法,顺控监控主机确认需要进行顺控操作的隔离开关,将需要操作的隔离开关的编号和分合状态发送给视频监控主机,视频监控主机根据隔离开关编号调取摄像头相应预置位,然后获取实时视频发送给智能分析主 全部
背景技术:
变电站“一键顺控”操作,是智能电网的一个高级应用技术,通过应用自动控制技 术、传感和物联网技术、状态自动识别和智能判断技术,将繁杂、重复、易误的传统人工倒闸 操作模式转变为项目软件预制、操作任务模块化搭建、设备状态自动识别、防误联锁智能校 核、操作步骤一键启动、操作过程自动顺序执行第自动模式,代表了智能电网运检的未来发 展方向。采用一键顺控操作变电站,通过倒闸操作程序化,在操作中尽量避免人为错误,达 到减少或无需人工操作,减少人为误操作,提高操作效率,为实现真正意义上的无人值班进 而为应对人员缺少和变电站的日益增多的矛盾,提高变电站的安全运行水平,开辟了一条 全新的出路。然而,由于目前一、二次设备状态位置判别方法单一,不满足安规中对设备位 置“双确认”判别要求,限制了顺控技术的推广应用。如何提供第二判据成为本领域亟待解 决的技术问题。 近年来,视频监控技术向“高清化、网络化、智能化”加速演进,已经开始应用在实 际工作和生活中,特别是视频智能分析技术,通过对视频数据流进行图像处理、目标分析, 实现自动检测、目标跟踪等。视频监控是智能变电站辅助系统的重要子系统,如果能够利用 视频监控提取有效信息,将能够作为隔离开关位置的判断依据。
技术实现要素:
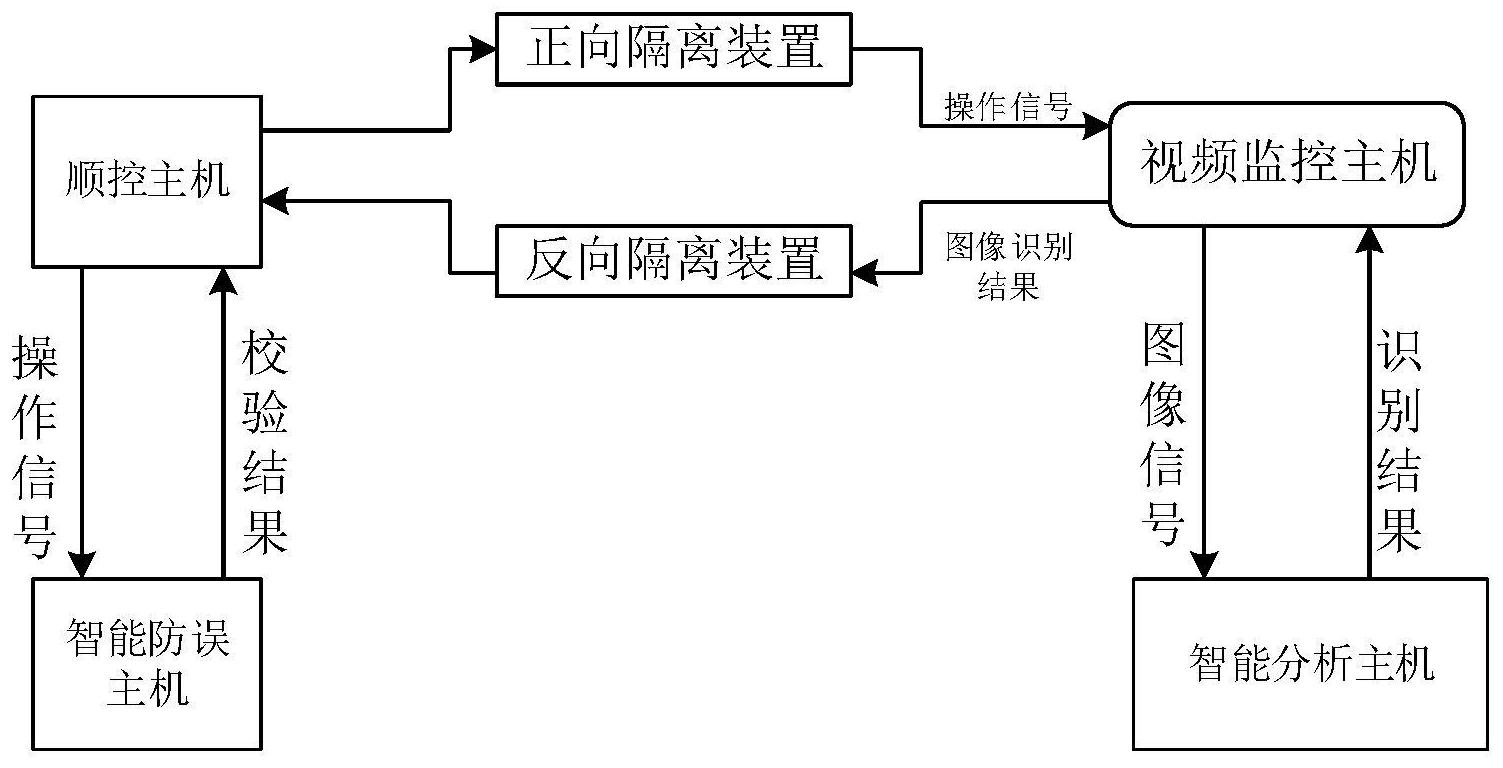
为了实现隔离开关位置的双确认,本发明提供一种基于隔离开关位置智能识别的 一键顺控双确认系统及方法,以实现顺控操作,提供不同源的第二判据的要求。 为达到上述目的,本发明提供了基于隔离开关位置智能识别的一键顺控双确认系 统,包括顺控监控主机、视频监控主机、若干摄像机、智能防误主机、智能分析主机、正向隔 离装置及反向隔离装置; 所述顺控监控主机,根据倒闸指令,通过智能防误主机进行倒闸指令的防误校验; 通过所述正向隔离装置将所述隔离开关的编号及分合状态发送到视频监控主机;接收所述 视频监控主机发送的隔离开关位置识别结果,确认隔离开关的动作结果; 所述视频监控主机根据所述隔离开关的编号获得隔离开关的位置,根据所述隔离 开关的位置调用对应的摄像机至预定采集位置,采集所述隔离开关的图像;将摄像机采集 的图像发送给所述智能分析主机;将所述智能分析主机得到的隔离开关位置识别结果通过 所述反向隔离装置发送给所述顺控监控主机; 所述智能分析主机根据图像判断隔离开关的位置并将判断结果发送给所述视频 监控主机。 进一步地,还包括站控层交换机和IV区视频交换机,站控层交换机用于顺控监控 4 CN 111614913 A 说 明 书 2/7 页 主机与智能防误主机的数据交互,IV区视频交换机用于将摄像机采集的图像发送给所述视 频监控主机,所述视频监控主机通过IV区视频交换机与所述智能分析主机进行数据交互。 进一步地,所述摄像机采用云台相机,采用仰视视角拍摄,以面状物体作为背景; 对于水平类型刀闸,满足合闸状态下,整个刀闸的刀臂及部分绝缘瓷瓶都在视野范围内,摄 像机与合闸触头位置连线与刀臂所在直线所成夹角大于45度,视野范围内没有与刀闸平行 或重合物体;对于垂直类型刀闸,满足合闸状态下,刀闸拐臂上半部分与静触头的两个环在 视野范围内,刀闸触头部分背景没有重叠物。 进一步地,对于500kV的隔离开关所有的刀闸设置至少9台摄像机;220kV以下对于 一个间隔上所有的隔离开关,设置3台摄像机;所述顺控监控主机和智能防误主机与所述视 频监控主机、若干摄像机智能分析主机设置在不同的安全分区,彼此隔离,通过正向隔离装 置及反向隔离装置进行数据交互。 进一步地,所述智能分析主机,根据图像判断隔离开关的分、合位置或刀闸分合指 示牌指示的隔离开关的分、合位置判断隔离开关的位置,并在识别出隔离开关三相位置不 一致或与顺控主机发出的联动信号中隔离开关位置不一致时下报警。 进一步地,所述顺控监控主机通过UDP报文向所述视频监控主机发送隔离开关的 编号及分合状态,所述UDP报文包括:类型标识,站序号,隔离开关编号,监控类型,隔离开关 动作属性长度,隔离开关动作属性,隔离开关变化值描述长度,隔离开关变化值,事件时标 以及和校验。 本发明另一方面提供一种利用所述的基于隔离开关位置智能识别的一键顺控双 确认系统的确认方法,包括: 所述顺控监控主机,根据倒闸指令,通过智能防误主机进行倒闸指令的防误校验; 通过所述正向隔离装置将所述隔离开关的编号及分合状态发送到视频监控主机; 所述视频监控主机根据所述隔离开关的编号获得隔离开关的位置,根据所述隔离 开关的位置调用对应的摄像机至预定采集位置,采集所述隔离开关的图像; 所述视频监控主机将摄像机采集的图像发送给所述智能分析主机;所述智能分析 主机根据图像判断隔离开关位置并将判断结果发送给所述视频监控主机;所述视频监控主 机将所述智能分析主机得到的隔离开关位置识别结果通过所述反向隔离装置发送给所述 顺控监控主机;所述顺控监控主机接收所述视频监控主机发送的隔离开关位置识别结果, 确认隔离开关的动作结果。 进一步地,根据倒闸指令,通过所述正向隔离装置将所述隔离开关的编号及分合 状态发送到视频监控主机,包括: 所述顺控监控主机通过隔离开关、断路器、接地刀闸的状态组合计算出当前需要 操作的隔离开关所在间隔的状态; 根据间隔的当前状态和操作的目标状态,确定需要操作的隔离开关;将隔离开关 的编号和开合状态信息以UDP报文的形式通过正向隔离装置发送到所述视频监控主机。 进一步地,所述视频监控主机接收到UDP报文后,执行的操作包括: 所述视频监控主机根据UDP报文中的隔离开关编号查找对应联动摄像头,获取要 操作的隔离开关的实时图像; 对于GIS的隔离开关:所述智能分析主机采用模拟人眼进行物体的检测辨识,首先 5 CN 111614913 A 说 明 书 3/7 页 找到刀闸的位置,再在隔离开关中找到字符,辨识字符,使用一个可滑动的固定大小的窗口 去依次获取图像内的一个局部区域,用图像特征来表征该局部区域,将窗口图像与目标图 像进行图像颜色分布的比较,滤掉与目标图像颜色差别大于阈值的子区域,再用分类器去 判别是否为要找寻的目标;根据字符辨识确定分合位置作为识别结果; 对于AIS的隔离开关:直接采集刀闸图像,构建深度学习模型并训练,深度学习模 型提取图像候选区域中的特征识别出分合状态;将所述深度学习模型训练后内置于所述智 能分析主机;所述智能分析主机基于图像获得识别结果。 进一步地,对于指针型GIS的隔离开关,需要先确定刀闸在图像中的位置;待刀闸 位置确定后,寻找指针线位置;确定指针的直线方程,最后根据指针所在位置的字符进行字 符辨识,确定分合位置作为识别结果。 进一步地,当所述视频监控主机完成接收到识别结果后,生成隔离开关位置确认 结果的文件,通过反向隔离装置传送到所述顺控监控主机; 所述顺控监控主机周期性检测反向隔离装置上的确认结果的文件,检测到确认结 果的文件后分析传输的识别结果,与遥信位置进行对比,进行双确认。 本发明的上述技术方案具有如下有益的技术效果: 本发明首先采用高清白光灯云台摄像机,进行合理布点,结合视频智能分析技术 识别开关、刀闸倒合闸是否到位,为顺控操作提供不同源的第二判据,扩展了顺控实施范围 并提高了顺控操作安全性,变电站辅助设备监视系统为顺控图像智能识别提供基础数据 源,通过对辅助系统视频监控进行改造,使满足顺控图像智能识别的要求,智能视频分析主 机智能分析软件的应用将视频监控变“被动”为“主动”。一键顺控要求顺控操作得到非同源 信号的双确认,采用视频图像识别作为第二判据,具有以下优点:判断准确、完全独立安装 且不用停电、维护便捷、安全可靠,具有广泛的工程应用价值。 附图说明 图1为本发明基于隔离开关位置智能识别的一键顺控双确认系统的组成示意图; 图2为本发明一键顺控双确认系统的区域设置示意图; 图3为确认文件传输示意图; 图4为实施例中UDP报文示意图; 图5位确认结果的文件格式示意图。











