
技术摘要:
本发明公开了眼科机器人末端执行器引导和定位的计算机程序产品及系统,所述计算机程序产品被配置为实时输出眼部手术准确切入点和手术实施点信息以引导并动态调整眼科机器人末端执行器的姿态和位置。本发明能够为眼科机器人末端执行器空间引导和定位调整提供精确的坐标 全部
背景技术:
近年来,随着人工智能、机器人技术、传感器技术和医学影像的高速发展,医疗机 器人已成为机器人研究和创新重要的一个方向。机器人在定位的精确性、操作的灵活性和 控制的稳定性等方面相较于人的操作有着巨大的优势。以麻省理工学院开发的达芬奇机器 人手术系统为例,其设计的理念是通过使用微创的方法,实施复杂的外科手术,由外科医生 控制台、床旁机械臂系统(Patient Cart)、成像系统(Video Cart)构成,已经成熟地用于成 人和儿童的普通外科、胸外科、泌尿外科、妇产科、头颈外科以及心脏手术中。罗伯特麦克拉 伦教授表示:目前的激光扫描和显微技术让人们能从微观层面上检查视网膜疾病,但这超 出了人类手可操作的生理极限。而运用机器人系统则为眼科手术的发展揭开了新的一页, 使目前尚不能执行的手术成为可能。2018年6月18日,英国牛津大学发布消息称,该校利用 Preceyes BV公司研发的显微手术机器人:PRECEYES手术系统,为多名病患完成了眼部手 术。2018年7月15日,由首都医科大学附属北京同仁医院主持的国家重点研发计划“智能机 器人”重点专项“眼科显微手术机器人系统研制与临床试验”的项目启动和实施方案论证会 在京顺利召开,标志着该项目正式进入全面实施和执行阶段。 眼科手术是治疗近视眼、青光眼、玻璃体视网膜、白内障等疾病的有效治疗手段, 但对医生的手术技能有着很高的要求。在显微镜的帮助下,医生的在手术中需要达到的操 作精度往往在20—80μm之间,而手术医生的手部颤抖的平均幅度在156μm,离眼科手术的精 度要求还有着一定差距。其次手术操作的环境可视性差,医生很难对眼球深度的信息进行 精确的感知,加上手术的时间较长,影响了人工手术的成功率。罗伯特麦克拉伦教授表示: 目前的激光扫描和显微技术让人们能从微观层面上检查视网膜疾病,但这超出了人类手可 操作的生理极限。而运用机器人系统则为眼科手术的发展揭开了新的一页,使目前尚不能 执行的手术成为可能。2018年6月18日,英国牛津大学发布消息称,该校利用Preceyes BV公 司研发的显微手术机器人:PRECEYES手术系统,为多名病患完成了眼部手术。2018年7月15 日,由首都医科大学附属北京同仁医院主持的国家重点研发计划“智能机器人”重点专项 “眼科显微手术机器人系统研制与临床试验”的项目启动和实施方案论证会在京顺利召开, 标志着该项目正式进入全面实施和执行阶段。然而,国内目前仍然还未形成有效、完整可实 施的用于眼科手术机器人末端执行器空间姿态准确定位的自动化系统。
技术实现要素:
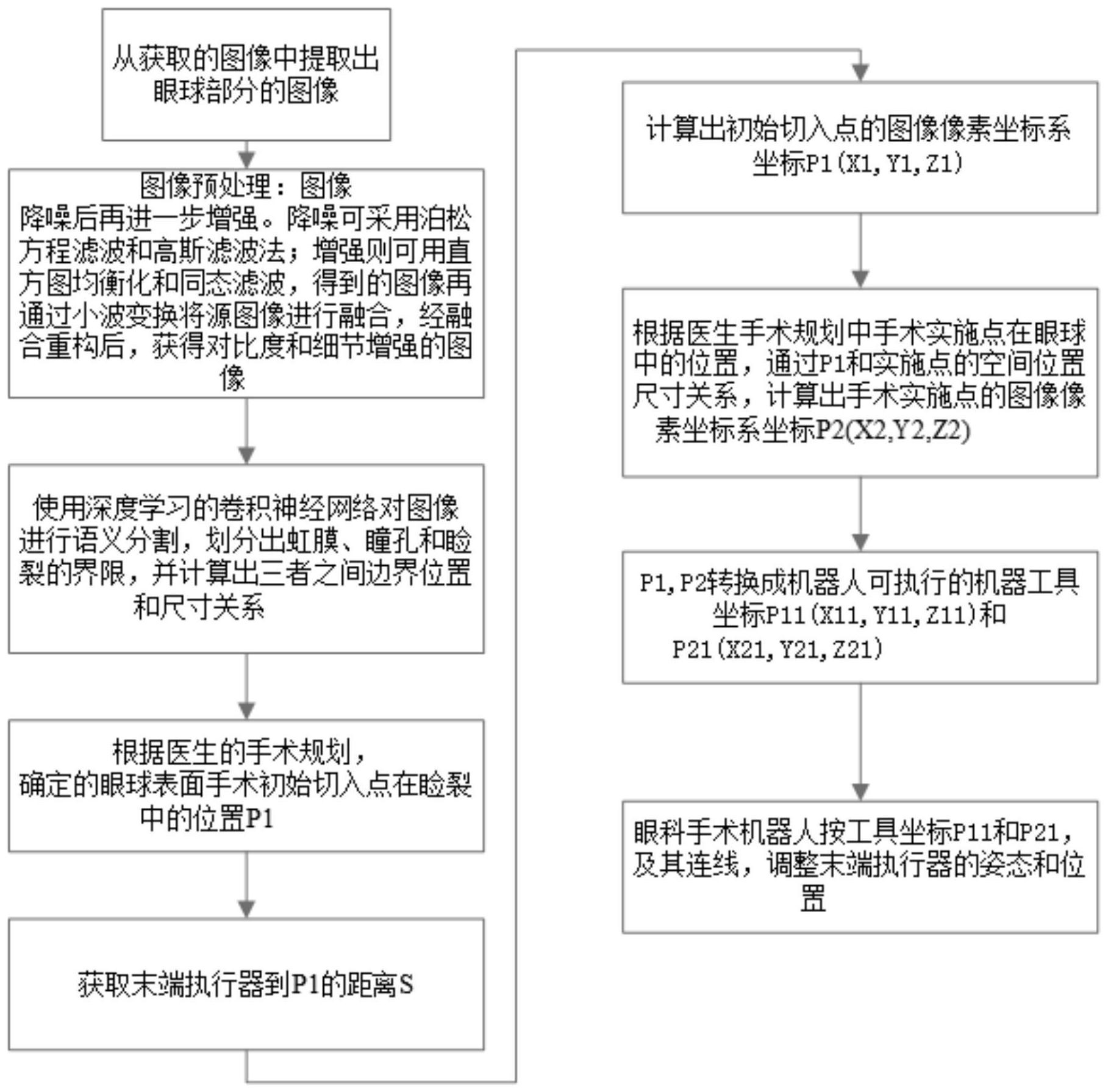
本发明提供了眼科机器人末端执行器引导和定位的计算机程序产品,用于实时输 出手术准确切入点和手术实施点信息以引导并动态调整眼科手术机器人末端执行器的姿 态,能够全自动、智能化且准确实现末端执行器的姿态控制。 4 CN 111588469 A 说 明 书 2/6 页 本发明通过下述技术方案实现: 眼科机器人末端执行器引导和定位的计算机程序产品, 所述计算机程序产品被配置为实时输出眼部手术准确切入点和手术实施点信息 以引导并动态调整眼科机器人末端执行器的姿态和位置。 优选的,本发明的计算机程序产品被配置为执行如下操作: S1,根据患者的眼部图像,利用深度学习的卷积神经网络进行语义分割,划分出虹 膜、瞳孔和睑裂的界限,并计算出三者之间边界位置和尺寸关系; S2,确定眼球表面手术初始切入点在睑裂中的位置P1,并获取末端执行器到P1的 距离S; S3,根据距离S和虹膜、瞳孔和睑裂三者的边界尺寸,计算出初始切入点的空间坐 标; S4,根据手术实施点在眼球中的位置,通过P1和手术实施点的空间位置尺寸关系, 计算出手术实施点的空间坐标; S5,将初始切入点和手术实施点的空间坐标转换成机器人可执行的工具坐标,以 引导末端执行器自动调整姿态和位置。 优选的,本发明的S1在进行语义分割之前还需要从获取的眼部图像中提取出眼球 部分的图像并对图像进行预处理,所述预处理过程包括对眼球部分的图像进行降噪及增强 处理。 优选的,本发明的降噪处理采用泊松方程滤波或高斯滤波法。 优选的,本发明的增强处理包括对降噪处理之后的图像进行直方图均衡化和同态 滤波,得到的图像再通过小波变换将源图像进行融合,经融合重构后,获得对比度和细节增 强的图像。 优选的,本发明的S5中机器人根据初始切入点的工具坐标和手术实施点的工具坐 标以及两者的连线,动态调整末端执行器的姿态和位置。 另一方面,本发明还提出了眼科机器人末端执行器引导和定位系统,该系统用于 引导眼科机器人按手术实际切入点和手术实施点信息动态调整末端执行器的姿态和位置。 优选的,本发明的系统包括图像区域划分模块、目标追踪模块、距离测量模块和坐 标换算模块; 其中,所述图像区域划分模块用于根据患者的眼部图像,利用深度学习的卷积神 经网络进行语义分割,划分出虹膜、瞳孔和睑裂的界限,并计算出三者之间边界位置和尺寸 关系; 所述距离测量模块用于根据眼球表面手术初始切入点在睑裂中的位置P1,得到末 端执行器到P1的距离S; 所述目标追踪模块用于根据距离S和虹膜、瞳孔和睑裂三者的边界尺寸,计算出初 始切入点的空间坐标;并根据手术实施点在眼球中的位置,通过P1和手术实施点的空间位 置尺寸关系,计算出手术实施点的空间坐标; 所述坐标换算模块用于根据目标追踪模块获得的初始切入点和手术实施点的空 间坐标转换为机器人可执行的机器工具坐标并输出引导末端执行器自动调整姿态和位置。 优选的,本发明的系统包括图像预处理模块,所述图像预处理模块用于获取患者 5 CN 111588469 A 说 明 书 3/6 页 的原始眼部图像,并从原始眼部图像中提取出眼球部分的图像并对图像进行预处理,最后 将预处理之后的眼部图像输出至图像区域划分模块。 优选的,本发明的预处理过程包括对眼球部分的图像进行降噪及增强处理;所述 降噪处理采用泊松方程滤波或高斯滤波法;所述增强处理包括对降噪处理之后的图像进行 直方图均衡化和同态滤波,得到的图像再通过小波变换将源图像进行融合,经融合重构后, 获得对比度和细节增强的图像。 本发明具有如下的优点和有益效果: 本发明能够为眼科手术机器人末端执行器空间定位和姿态调整提供精确的坐标 和位姿引导,手术中无须人工操作和标识,是自动化手术实现的功能基础;同时,通过在手 术执行中进行图像的实时分割和目标追踪,给出的动态坐标可以支持眼科手术机器人能够 自动调整姿态和位置;手术中出现头部和眼部超限运动时,机器人能可靠安全停止,提供了 比人工更快更好的安全性。 附图说明 此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部 分,并不构成对本发明实施例的限定。在附图中: 图1为本发明的计算机程序产品配置示意图。 图2为本发明的计算机程序产品执行操作示意图。 图3为本发明的图像区域划分结果示意图。 图4为本发明的初始切入点在睑裂中的位置示意图。 图5为本发明的坐标变换原理示意图。 图6为本发明的坐标换算结果示意图。 图7为本发明的系统结构示意图。











