
技术摘要:
描述了一种悬臂探针头(30),其包括与PCB板(33)相关联的支撑环(32)和以悬臂方式从支撑环(32)突出并且由与该支撑环(32)相关联的支撑件(34)保持的多个接触探针(31),每个接触探针(31)具有棒状体和至少一个第一端部(31a),该棒状体具有相对于相应于用悬臂探针头(30)测试的 全部
背景技术:
众所周知,探针头本质上是一种适于将多个微观结构的接触垫与进行其测试的测 试装置相应的通道电连接的器件。 集成电路上进行的测试用于检测和隔离在生产步骤中已经存在的缺陷电路。通 常,因此在将集成电路晶圆切割和组装到包含芯片的封装中前,使用探针头对集成电路晶 圆进行电测试。 广泛使用的是所谓的“悬臂”探针头,即包括多个探针的探针头,这些探针以悬臂 的方式从适当的支撑件突出。 具体地,如图1示意性示出的,悬臂探针头10通常包括例如由铝、陶瓷或其他合适 材料制成的支撑环11,其与集成电路板或PCB板12相关联。通常由树脂制成的支撑件13与支 撑环11相关联,且适于包含多个移动接触元件或接触探针14,移动接触元件或接触探针14 通常由具有良好的电性能和机械性能的特种合金线组成并且相对于参考平面,特别是相对 于被测器件15的平面以合适的角度α从树脂支撑件13中伸出来,被测器件例如是用此接触 探针14测试的集成电路的晶圆。为此,事实上推荐该接触探针14为悬臂探针。 具体地,悬臂接触探针14具有端部,其通常被称为钩14a,钩14a相对于探针体14b 以适当的角度弯曲。钩14a终止于接触尖端16A,接触尖端16A适于抵靠在被测器件15的接触 垫15A上。然后,钩14a在探针体14b和钩14a之间限定的弯曲点14c处弯曲,使得钩14a与被测 器件的平面基本正交。 通过悬臂探针头10在器件自身上的压力保证悬臂探针头10的接触探针14的接触 尖端16A和被测器件的接触垫之间良好的连接,接触探针14在器件向悬臂探针头10的移动 的相反方向上垂直弯曲。 具体地,正如测试集成电路的晶圆的正常操作期间发生的,当被测器件15紧靠钩 14a垂直移动时,相应的接触探针14在与此被测器件15的平面的基本正交的方向上弯曲,并 且其弯曲点14c以圆拱运动。 在被测器件15的方向上相对于树脂支撑件13突出的第一探针部18a因此限定了用 于连接探针14在其垂直弯曲移动中的工作臂,并且其通常用术语“自由长度”表示。 在与被测器件15的接触垫15 A的接触,并且它们向上移动或“过量移动 (overtravel)”超过预设的接触点时,悬臂接触探针14的钩形使得钩14a在接触垫15A上沿 被测系统探针头器件的几何形状所限定的方向移动,保证了在此接触垫15A上的悬臂接触 探针14的接触尖端16A的所谓的擦洗(scrub)。 每个悬臂接触探针14还包括第二探针部18b,第二探针部18b在PCB板12的方向上 5 CN 111587377 A 说 明 书 2/11 页 从树脂支撑件13突出并终止于接触探针14的另一端16B,另一端16B通常在焊接点17处被焊 接至PCB板12。 为形成这种焊接点,第二探针部18b应该具有合适的尺寸,尤其是厘米的数量级, 即至少是被测器件15的通常尺寸的两倍,被测器件15是边长尺寸为5mm的芯片或裸片;实际 上,通常是使用显微镜和镊子手动地、逐个探针地形成焊接点17。 因此需要设想一些空间以形成该焊接点17并且因此用于探针部18b向PCB板12突 出;特别地,悬臂探针头10的整体尺寸由于必须在支撑环11的周围设想的空间而增加,以形 成单独的接触,即用于每个接触探针14的单独的焊接点17。 特别需要考虑的是,虽然芯片或裸片形式的被测器件15的尺寸为约5mm,但是用于 形成焊接点17的第二探针部18b的长度应为偶数厘米(至少10mm=1cm,即裸片尺寸的两 倍)。 此外,应该指出的是,每个接触探针14施加到被测器件15的接触垫15A上的力取决 于许多因素,其中主要的是:制成接触探针14的材料种类、接触探针14的形状、接触探针14 的接触钩14a的角度、接触探针14的第一部18a突出的长度或自由长度、以及被测器件15的 过移动。所述因素还决定了接触钩14a在接触垫15A上滑动的程度,即所谓的“擦洗”。 支撑环11的用途在本领域是众所周知的,其通常由铝、陶瓷或其他合适的材料制 成,根据一组必须在其上进行测试的接触垫15A而具有不同的形状,以使接触探针14的自由 长度值一致,并因此使接触探针14施加到板自身的力的值一致,由此保证整个悬臂探针头 10的消耗和性能的一致性。 或者,如在图2中示意性示出的,可以用垂直技术生产探针头。 这样的垂直探针头,整体以20表示,基本上包括多个接触探针21,其通常由具有良 好的电性能和机械性能的特种合金线组成并且由至少一对基本呈板状且彼此平行的支撑 件或导向件保持,并在与由被测器件25限定的平面基本正交的方向上延伸,被测器件25通 常构造为集成电路的晶圆,如上所示。 具体地,垂直探针头20包括至少一个下部的板状支撑件(通常被称为“下裸片 (lower die)”或也被简单地称为下导向件22)和一个上部的板状支撑件(通常被称为“上裸 片(upper die)”或也被简单地称为上导向件23),它们分别有导向孔22A和23A,至少一个接 触探针21滑动穿过孔22A和23A的内部。 探针和导向件被容纳在壳体24内并且彼此相隔一定的距离放置,以为接触探针21 的移动或可能的变形提供自由区域或空气区域24A;为此,所述区域24A也被称为弯曲区域。 每个接触探针21都终止于具有接触尖端21A的端部,接触尖端21A抵靠在被测器件 25的接触垫25A上,以在所述被测器件25和测试器件(未示出)之间建立机械的和电接触,测 试器件的垂直探针头20形成端元件。 术语“接触尖端”在此以及下文中是指用来与待测试的器件或测试设备接触的接 触探针的端部的区域或范围,所述端部的区域或范围不一定是尖锐的。 有时,接触探针21在上导向件23处以固定方式固定到头自身:这是具有被阻塞的 探针的探针头的情况。 然而,对于被测器件上的接触垫,特别是板自身的中心之间具有松散的距离约束 的接触垫,接触垫探针头与探针经常一起使用,这些探针不是以固定的方式被阻塞,而是与 6 CN 111587377 A 说 明 书 3/11 页 所谓的电路板连接而阻塞(可能是通过微连接板):这是具有非阻塞的探针的探针头的情 况。微型接触垫通常称为“空间转换器(space transformer)”,因为其除了与探针接触之 外,它还允许在空间上重新分布其上提供的接触垫。 在这种情况下,如图2所示,接触探针21具有其他的接触尖端,被称为接触头21B, 其向空间转换器26的多个接触垫的板26B。凭借接触探针21的接触头21B抵靠并压在空间转 换器26的接触垫26B上,总是保证探针21和空间转换器26之间良好的电连接,空间转换器26 连接至PCB板(未示出)。 在图2的示例中,接触探针21还包括预变形的部分21C,该预变形部分21C适于在探 针头压力接触到被测器件25上的过程中使所述探针弯曲。 因此,在这种情况下,接触探针21的接触头21B是浮动的并且实现与空间转换器26 的接触垫26B的压力接触,空间转换器26能够使用不同的方法生产,例如根据所谓的直接附 加(direct attach)生产,其设想从空间转换器与其连接的PCB板直接获得空间转换器,或 者根据键合技术(bonding technology)生产,其中该空间转换器与PCB板物理隔离并且凭 借键合线连接至PCB板。 垂直技术主要的优点是可以检测具有更紧密的接触垫的器件,即很窄的间距以及 全阵列类型的间距,即具有布置在所有4个面上的垫。 际上,因为在悬臂技术中尖端具有锥形的形状,所以在任何情况下悬臂探针头在 间距方面是有利的,尤其使用多层结构用于相应的支撑环并且精确地利用尖端的锥形的形 状用于接触靠近的垫,即具有减小的间距。 根据垂直技术,垫之间的距离受探针的直径和将探针带至接近导向件内设置的导 向孔的能力的限制。在此以及下文中,“垫之间的距离”的定义是指所述垫的对称中心之间 的距离。 以目前的技术,使用垂直技术生产的探针头不能够达到用悬臂探针头获得的间 距。 相反,相对于悬臂头,用垂直技术生产的探针头具有以下优点:其能够以高平行度 接触到裸片,并具有“复制”被测器件上的板分布的接触尖端。 利用通过悬臂技术产生的探针头,反而需要提供一定的空间以形成焊接点,并且 不可能进行平行的多个裸片的同时测试,即使已知的策略可以补救这样的不便,获得比单 个测试更高的平行度,例如使用交错探针的步骤,或使用对角布置的探针测试相互靠近的 两个裸片,然而达不到垂直技术的性能。 本发明的技术问题是提供具有结构和功能特征的悬臂探针头以克服根据现有技 术生产的探针头的限制,尤其能够创建集成在晶圆上的不同裸片的平行测试。
技术实现要素:
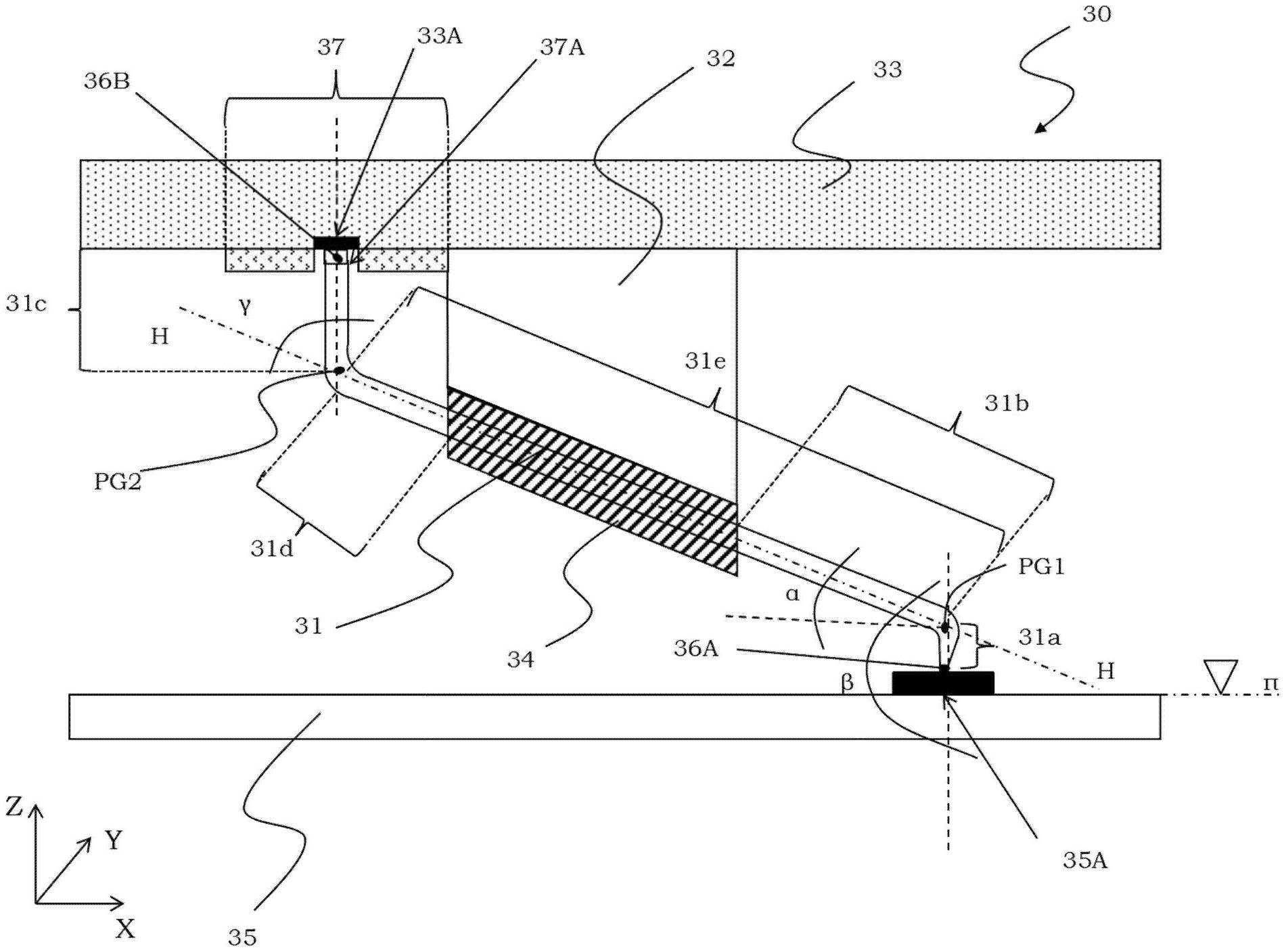
本发明根本的技术方案的构思是改变悬臂探针的结构以使得从树脂支撑件向PCB 板突出的探针的部分具有另外的弯曲点,以产生更靠近支撑件自身的接触区域,克服提供 合适的长度以实现探针和PCB板焊接的需求。 基于本技术方案的构思,由包括与PCB板相关联的支撑环和多个接触探针的悬臂 探针头解决了该技术问题,多个接触探针以悬臂方式从此支撑环突出并且由与该支撑环相 7 CN 111587377 A 说 明 书 4/11 页 关联的支撑件保持,每个接触探针具有基本棒状的探针体和相对于相应于用悬臂探针头测 试的器件的晶圆平面的参考平面倾斜的纵向轴线,以及设置在第一探针部中的至少一个第 一端部,第一探针部在被测器件的晶圆的方向上从支撑件突出,该第一端部相对于起始于 弯曲点并终止于适于抵靠在晶圆的被测器件的接触垫上的接触探针的接触尖端的纵向轴 线弯曲,其特征在于,每个接触探针还包括设置在第二探针部中的第二端部,该第二探针部 在相对于第一探针部相反的方向上从支撑件向PCB板突出,所述第二端部相对于纵向轴线 在另外的弯曲点开始弯曲,并在另外的适于抵靠在PCB板的接触垫上的接触探针的接触端 的终止弯曲。 更具体地,本发明包括以下附加的和可选的特征,这些特征是单独考虑的,或者, 如果需要,可以相互结合。 根据本发明的另一方面,每个接触探针可以进一步包括设置在第一和/或第二探 针部处的至少一个阻尼部。 更具体地,可以在第一探针部处设置这种至少一个阻尼部。 此外,这样的至少一个阻尼部可以基本上构造为缩放部,该缩放部在各自的弯曲 点处连接到第一端部和探针体。 这样的至少一个缩放部可以基本上包括具有可变截面的四个面,这些面基本上布 置为平行六面体并且在其中限定出一个空的空间。 根据本发明的另一方面,可以在第二探针部处设置这种至少一个阻尼部。 具体地,这样的至少一个阻尼部可以基本上构造为弹簧部,该弹簧部在其他的弯 曲点处连接至探针体并且适于限定接触探针的其他的接触端。 根据本发明的另一方面,悬臂探针头可以进一步包括至少一个支撑板,该支撑板 连接至支撑环并且设置有适合第二端部通过的孔,该第二端部设置有接触探针的另一端。 更具体地,该支撑板可以由适合的绝缘材料制成并且被焊接至支撑环。 此外,根据本发明的另一方面,每个接触探针的第二端部可以相对于纵向轴线弯 曲,以与相应于PCB板的平面的参考平面基本上正交。 根据本发明的另一其他方面,接触探针的第一端部可以具有锥形的形状,这允许 其在更多平面上布置。 此外,根据本发明的另一方面,设置有支撑板和支撑件的支撑环可以安装成与PCB 板压力接触,以接触探针的端部的其他端抵靠在PCB板的接触垫上。 根据本发明的另一其他方面,悬臂探针头可以包括多个模块,每个模块都设置有 支撑环和支撑件,接触探针从支撑件突出,终止于第一端部和第二端部,所述模块具有可以 与单个被测器件的尺寸比较的尺寸。 更具体地,所述多个模块可以是分布式的,以覆盖与被测器件的晶圆面积相等的 PCB板的面积。 此外,每个所述模块可以包括至少一个接触部,该接触部适当地设置有适于容纳 至少一个固定元件的至少一个孔。 每个所述模块可以进一步包括定位销,其具有与尽可能多的外壳互补的合适的形 状。 根据本发明的这个方面,悬臂探针头可以进一步包括,用于容纳模块的、与PCB板 8 CN 111587377 A 说 明 书 5/11 页 关联的支撑件并且该支撑件设置有用于模块的定位销的外壳。 根据本发明的另一方面,悬臂探针头可以包括接触探针,接触探针具有各自的从 支撑件突出的第二探针部,和/或各自的具有不同尺寸的第二端部,以改变PCB板接触垫的 分布。 问题进一步由以下的悬臂接触探针解决:该悬臂接触探针包括探针体,该探针体 具有预先确定的纵向轴线,当该接触探针安装在与悬臂探针头的支撑环关联的支撑件上 时,纵向轴线相对于被测器件的晶圆平面的参考平面倾斜,所述悬臂探针进一步包括设置 在第一探针部中的至少一个第一端部,第一探针部在被测器件的晶圆的方向上从支撑件突 出,该第一端部相对于起始于弯曲点并终止于适于抵靠在晶圆的被测器件的接触垫上的接 触探针的接触尖端的纵向轴线弯曲,其特征在于,悬臂探针进一步包括设置在第二探针部 中的第二端部,该第二探针部在相对于第一探针部相反的方向上从支撑件向PCB板突出,该 第二端部相对于起始于另外的弯曲点并终止于另外的适于抵靠在PCB板的接触垫上的接触 探针的接触端的纵向轴线弯曲。 根据本发明的另一方面,悬臂接触探针可以进一步包括设置在第一和/或第二探 针部处的至少一个阻尼部。 根据本发明的另一方面,可以在第二探针部处设置至少一个阻尼部。 特别地,这样的至少一个阻尼部可以基本上构造为缩放部,该缩放部在各自的弯 曲点处连接到第一端部和探针体。 此外,这样的至少一个缩放部可以基本上包括具有可变截面的四个面,这些面基 本上布置为平行六面体并且在其中限定出一个空的空间。 根据本发明的另一方面,这样的至少一个阻尼部可以基本上构造为弹簧部,该弹 簧部在另一弯曲点处连接至探针体并且适于限定接触探针的另一接触端。 此外,根据本发明的另一方面,第一端部可以相对于纵向轴线弯曲,以当接触探针 被安装在与悬臂探针体的支撑环相关联的支撑件上时,第一端部与被测器件的晶圆的参考 平面基本上正交。 最后,根据本发明的另一方面,第二端部可以相对于纵向轴线弯曲,以当接触探针 被安装在与悬臂探针体的支撑环相关联的支撑件上时,第二端部与相应于PCB板的平面的 参考平面基本上正交。 通过以下参照附图对以非限制性实例的方式给出的一个实施方案的描述,根据本 发明的悬臂探针头和接触探针的特征和优点将是显而易见的。 附图简要说明 在附图中: 图1示意性示出了根据现有技术生产的悬臂探针头的截面图。 图2示意性示出了根据现有技术生产的垂直探针头的截面图。 图3A示意性示出了根据本发明生产的悬臂探针头的实施方案的截面图。 图3B和3C示意性示出了根据本发明生产的悬臂探针头的替代实施方案的截面图。 图4示意性示出了包括至少一对接触探针的图3C的悬臂探针头的截面图。 图5示意性示出了图3A-3C或图4的悬臂探针头的俯视平面图。 图6A和6B示意性示出了根据本发明以模块化形式生产的探针头的相应平面图和 9 CN 111587377 A 说 明 书 6/11 页 侧面图。 实施方式 参考这些附图,特别是参考图3A,描述了悬臂技术中的探针头。所述悬臂技术中的 探针头根据本发明实现,在下文中称为悬臂探针头,并整体用30表示。 需要注意的是,附图显示了根据本发明的探针头的示意图,并且没有按比例绘制, 而是为了强调本发明的重要特征而绘制的。此外,在附图中,不同的元件以示意的形式示 出,其形状可以根据所需应用而改变。还应注意,在附图中,相同的附图标记表示形状或功 能相同的元件。最后,通过附图中的实例示出的不同方面可以明显地彼此结合,并且可以从 一个实施方案互换到另一个实施方案。 更具体地,悬臂探针头30包括多个可移动的接触元件或接触探针31,以悬臂形式 从支撑环32突出,支撑环32例如由铝、陶瓷或其它合适的材料制成,与集成电路板或PCB板 33相关联。在图3A的实例中,为了简化说明,仅示出了一个接触探针31。每个接触探针31通 常由具有良好电性能和机械性能的特种合金线制成,适于通过PCB板33确保与测试设备(未 示出)的良好电接触。 如现有技术所述,通常由树脂制成的支撑件34与支撑环32相关联,并且适于结合 接触探针31,接触探针31沿着纵轴HH从树脂支撑件34突出,纵向轴线HH相对于参考平面n倾 斜第一角度α,参考平面n尤其是被测器件35的平面,例如被测集成电路的晶圆,每个接触探 针31如钓竿的形式突出在所述晶圆上方,即以悬臂形式突出。特别地,第一角度α的值可以 在0度和30度之间,优选为15度。 方便地,悬臂接触探针31具有通常称为钩31a的端部,该端部相对于沿着纵向轴线 HH延伸的探针体31e弯曲第二角度β。钩31a以接触探针31的接触尖端36A终止,该接触尖端 36A适于抵靠在被测器件35的接触垫35A上。特别地,第二角度β的值可以在90度和120度之 间,优选为105度。 在优选实施方案中,第二角度β被设置为使得每个接触探针31的钩31a基本上正交 于被测器件35的参考平面π,即β=90° α,或者β-α=90°。 如现有技术所做的,在此需要强调的是,术语"尖端"表示接触探针的端部区域或 范围但未必尖锐。 钩31a在探针体31e自身限定的弯曲点PG1处弯曲,特别是在第一探针部31b中,当 接触探针31安装在悬臂探针头30中时,第一探针部31b旨在从树脂支撑件34沿被测器件35 的方向突出;因此在悬臂探针头30在其正常操作中接触被测器件35期间,所述第一探针部 31b限定了在悬臂接触探针31垂直弯曲移动中的悬臂接触探针31的工作臂,通常用术语"自 由长度"来表示。 事实上,如现有技术所解释的,通过悬臂探针头30对器件本身的压力确保了悬臂 接触探针31的接触销36A和被测器件35的接触垫35A之间的良好接触,在该情况下,悬臂接 触探针31在与器件的移动相反的方向上受到正交于参考平面π的弯曲(即,在图中所示的方 向Z上)。 特别地,当被测器件35抵靠钩31a移动时,相应的悬臂接触探针31弯曲,并且其弯 曲点PG1呈圆拱形,同时钩所终止的接触尖端36A沿着参考平面π,特别是在相应的接触垫 35A上移动,确保所述垫的表面的所谓擦洗。 10 CN 111587377 A 说 明 书 7/11 页 此外,钩31a具有锥形形状,其可以特别是在多层结构中用于接触非常接近即具有 较小间距的被测器件35的接触垫35A。 如本领域技术人员所熟知的,接触垫之间的"间距"或距离是指相应中心之间的距 离,即相关垫的对称中心。 每个悬臂接触探针31还包括在PCB板33的方向上从树脂支撑件34突出的第二探针 部31d。第二探针部31d也沿着纵向轴线HH从树脂支撑件34突出。在传统的悬臂接触探针31 中,如上所述,为了实现探针本身的焊接,从树脂支撑件向PCB板方向突出的探针部继续延 伸。 方便地,根据本发明的悬臂接触探针31替代地包括限定在第二探针部31d中的另 一个弯曲点PG2,即当接触探针31安装在悬臂探针头30中时,接触探针31的该部分旨在从树 脂支撑件34沿PCB板33的方向突出,并且适于限定以另一端36B终止的倾斜端部31c,该倾斜 端部31c适于限定悬臂接触探针31的另一个接触尖端。端部31c与接触探针31的纵向轴线HH 形成第三角度γ,其值可以是15至90度,优选75度。 在优选实施方案中,第三角度γ被设定为使得端部31c也相对于参考平面π基本正 交地倾斜,参考平面π也对应于通常平行于被测器件35布置的PCB板33的平面,即γ=90°-a 或者γ a=90°。因此,当端部31c被推靠在PCB板33上时,特别是在悬臂探针头30的组装过 程中,第二探针部31d由此限定了悬臂接触探针31的工作臂。 需要强调的是,在该情况下,接触探针31的另一个接触端36B能够作为探针的接触 端部,例如现有技术中所述的垂直接触探针的接触头。因此,根据本发明,如下文将更好解 释的,可以采用垂直技术中典型的探针和PCB板之间的接触策略。 更具体地,根据本发明,方便地,悬臂探针头30还包括支撑板37,该支撑板37设置 有孔37A,该孔37A适于设置有悬臂接触探针31的另外的端部36B的端部31c的通过。 在图3A所示的实例中,支撑板37由合适的绝缘材料制成,例如陶瓷或其它合适的 材料,并且例如通过焊接与支撑环32连接或制成一体;更具体地,支撑板37从支撑环32沿接 触探针31的第二探针部31d上方的方向延伸。 支撑板37可以固定到PCB板33。 需要强调的是,根据本发明,有利地,接触探针31的另一个接触端36B然后直接接 触PCB板33,特别是利用在其上形成的适当的接触垫33A,相应的端部31c方便地由支撑板37 的孔37A引导。 因此,由于接触探针31的结构在第二探针部31d中设置有适于与PCB板33限定接触 端部31c的另一个弯曲点PG2,因此可以消除接触探针31与PCB板33的结合,而与所述PCB板 33的接触相反由接触探针31在端部31c的另一端36A产生。具体地,接触探针31,更具体地, 其端部31c,以与垂直技术中的探针的接触头等效的形式滑动穿过设有孔37A的支撑板37, 并且其设有适于通过在PCB板33的接触垫33A上的压力进行接触的另一端36B。 此外,需要强调的是,方便地,接触探针31具有端部或钩31a,该端部或钩31a在被 测器件35的相应接触垫35A上逐渐变细并弯曲,它由支撑环32支撑,其特别是由金属制成, 并且它由树脂支撑件34支撑,即,它保持探针和头作为整体的悬臂基础结构。 在该情况下,悬臂探针头30通过类似于垂直技术的所谓"直接附着"的方法连接到 PCB板33。 11 CN 111587377 A 说 明 书 8/11 页 此外,在其操作中,钩31a和端部31c可以类似于放置在悬臂接触探针31的相对端 的两个弹簧,即,在悬臂探针头30的正常操作期间,当抵靠在被测器件25上并接触PCB板33 时,在适于抵靠在相应的接触垫上的端部。 根据图3B示意性示出的替代实施方案,悬臂接触探针31还包括阻尼部,该阻尼部 基本上构造为设置在第一探针部31b处的缩放部50。 更具体地,缩放部分50在相应的弯曲点PGla和PGlb处连接到钩31a和探针体31e。 缩放部50基本上包括具有可变截面的四个面50a-50d,以均匀地分布应力,四个面 50a-50d基本上布置为平行六面体,并在其中限定了一个空的空间50e。很明显,在悬臂接触 探针31的接触尖端36A在被测器件35的接触垫35A上的挤压接触触期间,缩放部50能够提供 期望的阻尼功能。 根据在图3C中示意性示出的另一优选实施方案,悬臂接触探针31可以进一步包括 另一个阻尼部,该阻尼部基本上构造为弹簧部51,设置在第二探针部31c处。更具体地,弹簧 部51在另一个弯曲点PG2处连接到探针体31e,并且限定了适于与PCB板33的接触垫33A接触 的另一端36B。 在图3C所示的实例中,弹簧部51基本上成形为细长的N形。很明显,在悬臂接触探 针31的另一端36A挤压接触在PCB板33的接触垫33A上期间,弹簧部51能够提供期望的阻尼 功能。 显然可以实现设置有弹簧部51而不是伸缩部50的悬臂接触探针31。 需要注意的是,如图4中示意性示出的,当接触探针31安装在悬臂探针头30上时, 在沿着PCB板33的方向从树脂支撑件34突出的第二探针部31d中限定的另一弯曲点PG2的存 在允许接触探针31的另一端36B空间分布,特别是根据PCB板33的接触垫33A的空间分布,如 图4示意性示出,使用图3C的接触探针31的实施方案为非限制性实例。特别地,具有弹簧部 51的上升探针部31c以及因此用作接触探针31的接触头的另外的端部36B分布在更多的行 上,在图中为两行,而接触尖端36A排列在一行中,在图中缩放部50重叠。 需要强调的是,由于从树脂支撑件34突出的第二探针部31d、上升探针部31c以及 可能设置在其中的弹簧部51的不同尺寸,有可能改变接触垫33A在PCB板33上的分布,也在 多于两行上。因此,相对于被测器件35的接触垫35A,可以放松PCB板33的所述接触垫33A的 间距限制。 因此,有可能有利地获得接触探针31和PCB板33的接触垫33A之间的接触,而不需 要引入额外的部件,特别是空间转换器,如通常在垂直技术中的那样。 实际上,众所周知,与被测器件35的接触垫35A的分布相比,PCB板33的接触垫33A 的分布具有更宽松的空间限制,并且这可以使用悬臂探针头30来复制,该悬臂探针头30包 括上述悬臂接触探针31,该悬臂接触探针31设置有另外的弯曲点PG2,而不使用额外的部 件。 具体而言,在图4中,示出的悬臂探针头30,其包括至少一个第一接触探针31和第 二接触探针31',所述第一接触探针31和第二接触探针31'设置有各自的弯曲点PG2,所述弯 曲点PG2连接到各自的弹簧部51、51',所述弹簧部51、51'适于限定各自的另外的端部36B、 36B',所述端部36B、36B'相对于彼此方便地移动,因此能够在不同的位置接触PCB板33的垫 33A。更具体地,第二探针部,即弹簧部51、51',方便地容纳在支撑板37的不同孔37A、37A' 12 CN 111587377 A 说 明 书 9/11 页 中。 如图5所示,悬臂探针头30的俯视平面图进一步突出了接触探针31的另一端36B相 对于相应的接触尖端36A的空间再分布,PCB板33通过其显示。在该图中特别清楚的是,设置 有另外的弯曲点PG2的接触探针31的配置允许将具有第一距离或间距P1的被测器件35的接 触垫35A与具有比第一间距P1更长的第二距离或间距P2(P2>P1)的PCB板33的接触垫33A连 接起来,从而获得期望的空间变换,而不需要使用诸如空间转换器的附加组件。 还需要强调的是,在组装步骤中,设置有支撑板37的支撑环32和树脂支撑件34的 组合被方便地压靠在PCB板33上,从而确保端部31c的接触,特别是在探针头30的正常操作 期间接触探针31的另一接触部36B与PCB板33的接触垫33A的接触。由于形成端部31c的另一 个弯曲点PG2的存在,可以实现压力下的组装,在安装在探针头30中的接触探针31的挤压接 触期间,特别是当设置有支撑板37的支撑环32抵靠在PCB板33上时,该弯曲点PG2能够起到 弹簧的作用。 如图3C所示,如果接触探针31设有弹簧部51,该效果得到进一步保证。 需要强调的是,接触探针31的尺寸便于确保相应的接触尖端36A具有足够的接触 力,被测器件35的接触垫35A上的钩31a以该接触尖端36A终止。特别地,由每个接触探针31 施加的力F与从树脂支撑件34突出的探针部提供的臂成比例,并且等于: F=E*D4/L3 (1) 其中: E是杨氏模量(或纵向弹性模量); D是接触探针31的直径,表示其横截面的最大尺寸;和 L是第一探针部31b的长度,其限定了第一探针部31b的臂(或自由长度)。 适当地,根据本发明,通过还在端部31c处压紧接触探针31,类似的力被施加到PCB 板33上,如上所述,端部31c在垂直技术中基本上用作探针的接触头部。 有利地,在图3C所示的优选实施方案中,由于阻尼部,特别是设置在设置有第二弯 曲点PG2的悬臂接触探针31的第一和第二探针部31b和31d处的缩放部50和弹簧部51,施加 在被测器件35的接触垫35A和PCB板33的接触垫33A上的力衰减。 如已指出的,第二弯曲点PG2的不同布置还允许产生适当的空间变换并分配PCB板 33的接触垫33A,特别是通过将它们放置在适于其较大尺寸的距离处,也如图5所示。 还应需要强调的是,由于接触探针31的端部31c在另外的端部36B处与在组装悬臂 探针头30时产生的PCB板33的接触垫33A之间的接触,特别是由于设置有支撑板37的支撑环 32在PCB板33上的压力,根据本发明的悬臂探针头30还允许克服垂直技术的不利方面,即垂 直探针的头端部与PCB板的接触是浮动的,并且在相应的尖端部每次接触(触及)到被测器 件的接触垫上时,应该每次重新创建。 换言之,在根据本发明的悬臂探针头30中,接触探针31的端部31c与PCB板33的接 触垫33A之间的接触在各自的钩31a不接触在被测器件35的接触垫35A上的情况下也得到保 证。 此外,基于根据本发明的接触探针和悬臂探针头的特征,特别是利用悬臂探针头 30的优选实施方案,可以解决附加的技术问题。 设置有另一个弯曲点PG2的悬臂接触探针31的配置以及另一端36B在PCB板33上的 13 CN 111587377 A 说 明 书 10/11 页 压力下的接触实际上允许以模块化形式生产探针头。更具体地,该模块化探针头包括PCB板 33和多个模块40,每个模块设置有支撑环32和树脂支撑件34,接触探针31从树脂支撑件34 突出,接触探针31在一侧终止于钩31a,在另一侧终止于端部31c,端部31c特别方便地由设 置在与支撑环32制成一体的支撑板37中的孔37A引导。然后,每个模块40具有如上所述的悬 臂探针头30的特征,但是模块40以可以相当于单个被测器件35的尺寸、特别是仅稍大一些 的尺寸来生产,其中"可以相当于"是指模块40占据的面积等于被测器件35占据的面积,或 者大于被测器件35占据的面积高达50%的值,优选20%的值。 特别地,多个模块40被布置为在对应于包括被测器件的芯片晶圆的区域上方延 伸,该区域相当于PCB板的可用表面,从而提供适于并行测试更多器件的模块化探针头。 更具体地,PCB板33设置有适当的支撑结构或金属外壳,用于容纳模块40。 合适的是,包括与PCB板33相关联的多个模块40的此模块化探针头具有允许在损 坏的情况下单独更换模块的优点,该更换是可能的,这是由于接触探针31在其另一端36B处 无需焊丝,而是以类似于垂直技术的所谓“直接附加”(direct attach)的形式进行接触PCB 板33的接触垫33A。 更具体地,如图6A和6B所示,每个模块40包括至少一个接触部41,该接触部41适当 地设置有至少一个孔41A,特别是螺纹孔,该孔适于容纳至少一个固定元件,特别是螺钉42, 由于螺钉的拧入,模块40被制成一体或固定到PCB板33的支撑结构或直接固定到PCB板本 身。 在图6A所示的优选实施方案中,每个模块40设置有至少一对接触部41,所述接触 部41沿着设置有支撑板37的支撑环32排列,特别是在基本上呈正方形的支撑环32的对角处 排列。 如图6B中示意性示出的,还可以为每个模块提供具有合适形状的定位元件或销 43,这些定位元件或销43与预先布置在PCB板33的支撑结构中的尽量多的外壳(未示出)互 补,从而确保每个模块40相对于PCB板33的正确定位,并便于其更换。 更具体地,所述定位销43可以成形为从支撑环32沿PCB板33的方向突出的小圆柱 体或棱锥体,适于以有限的间隙(例如小于10微米)在PCB板33的支撑结构的合适的壳体中 找到其位置,从而由于壳体和定位销43之间的耦合,确保每个模块40的精确组装。 支撑结构或金属外壳也方便地设置有合适的接触点,用于与PCB板33定位。 需要强调的是,包括多个模块40的模块化接触头具有进一步的其它优点,例如在 损坏的情况下,可以仅更换其中的一部分,到目前为止,具有所谓的浮动接触探针的垂直技 术的唯一优点是允许通过简单地将探针拉出来更换一个或多个损坏的探针。方便地,对应 于一个或多个模块40的可替换部分小于整个探针卡,即小于被测器件的晶圆,因此降低了 探针卡本身的维护成本,这在所谓的低成本或大规模生产领域如存储器测试领域中是特别 需要的。 由于使用了设置有合适的接触部41的模块40,该接触部41允许例如通过螺纹固定 到PCB板33的支撑结构上,替换损坏部分的操作变得比替换以垂直技术生产的头的一个或 多个探针更简单。 总之,由于悬臂接触探针在探针体的一部分中具有至少一个另外的弯曲点,该探 针体旨在从支撑环沿PCB板的方向突出,如上所述,所产生的接触头允许将悬臂技术的优点 14 CN 111587377 A 说 明 书 11/11 页 与垂直技术的优点相结合,悬臂技术的优点保持了其基本结构,具有无需焊接获得的接触, 并且不需要使用相对于支撑环的整体尺寸大得多的区域,其中支撑环仅与支撑板制成一 体。 特别地,需要强调的是,由于悬臂技术的成本降低,该探针头在制造时当然不贵, 并且由于使用了可单独更换的模块,在探针头的使用期间也不贵。 此外,由于接触探针的配置,可以容易地修改PCB板的接触垫的距离或间距;事实 上,像扇子一样"打开"以端部和另外的端终止的第二探针部足矣,只需修改其长度,就能够 在PCB板上实现甚至非常大和非常远的接触垫。 因此,也有可能降低PCB板的成本,这实际上与其垫的密度或间距和尺寸有关。 还要需要强调的是,根据本发明生产的探针头本身变成了空间转换器,这可以进 一步降低PCB板的成本,这是测试设备的最相关的成本,并且如上所述,确实与接触垫的密 度或间距和尺寸相关。 此外,在一个或多个端探针部处阻尼部的存在允许改善相应端部与被测器件或 PCB板的接触垫的接触。 最后,根据本发明的悬臂探针头以模块化形式的结构确保了仅替换对应于一个或 多个模块的受损头部的可能性。 15 CN 111587377 A 说 明 书 附 图 1/9 页 图1现有技术 16 CN 111587377 A 说 明 书 附 图 2/9 页 图2现有技术 17 CN 111587377 A 说 明 书 附 图 3/9 页 图3A 18 CN 111587377 A 说 明 书 附 图 4/9 页 图3B 19 CN 111587377 A 说 明 书 附 图 5/9 页 图3C 20 CN 111587377 A 说 明 书 附 图 6/9 页 图4 21 CN 111587377 A 说 明 书 附 图 7/9 页 图5 22 CN 111587377 A 说 明 书 附 图 8/9 页 图6A 23 CN 111587377 A 说 明 书 附 图 9/9 页 图6B 24











