
技术摘要:
本发明公开了一种基于无人机的水下航行器打捞回收装置,包括无人机,所述无人机底部设有吊环,所述吊环内连接带缆绳,所述带缆绳远端连接打捞船,所述吊环上设有挂钩,所述挂钩底部连接触发机构,所述触发机构两侧均设有连接板,所述连接板上均铰接连杆一,所述连接杆 全部
背景技术:
水下航行器是一种航行于水下的航行体,包括载人水下航行器和无人水下航行 器,它能够完成水下勘探、侦测甚至是军事上的进攻防守等任务。在海洋开发日益重要的现 在,水下航行器越来越得到了各个国家的重视,无论是在民用还是在军用上,都扮演着重要 的角色。水下航行器大都为圆柱体结构,水下航行器一般都是在探测船上的发射器内发射 入水中在收集完数据后,都需要专业的潜水员下水打捞,浪费人力物力,并且,在进行打捞 时,打捞船需要移动到定位的水面附近,一旦同时打捞多个水下航行器,打捞船需要频繁移 动,不仅浪费时间,也会消耗大量的燃油,而且,在高难度海况条件下,回收人员不仅需要具 有高超的船舶控制技术,在进行回收时,也会对回收人员的人身安全造成隐患。
技术实现要素:
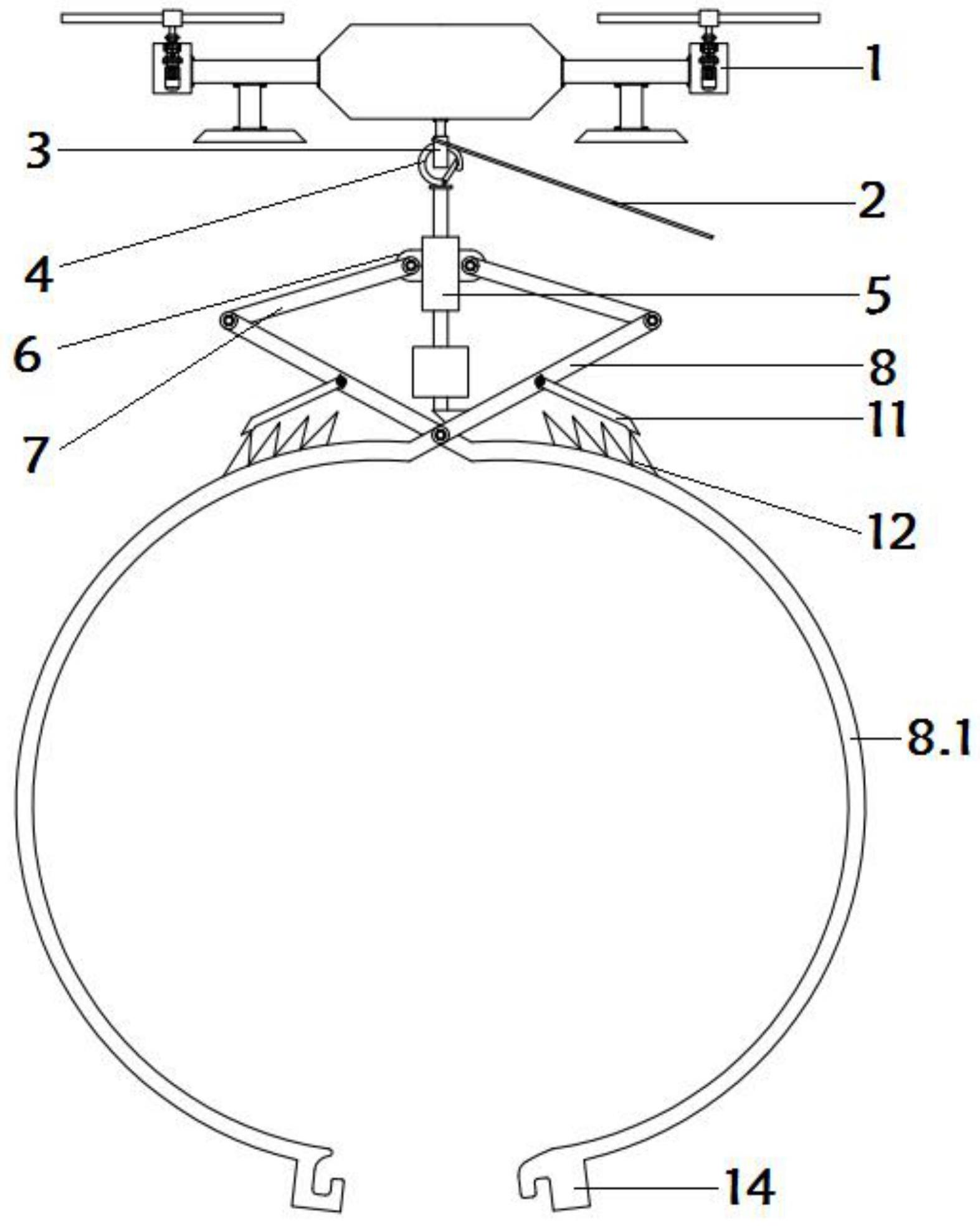
本发明要解决的技术问题就是克服以上的技术缺陷,提供一种可在高海况下回 收,对船舶控制技术要求低,能保证回收人员安全,可远距离打捞,夹持航行器牢固的基于 无人机的水下航行器打捞回收装置。 为了解决上述问题,本发明的技术方案为:一种基于无人机的水下航行器打捞回 收装置,包括无人机,所述无人机底部设有吊环,所述吊环内连接带缆绳,所述带缆绳远端 连接打捞船,所述吊环上设有挂钩,所述挂钩底部连接触发机构,所述触发机构两侧均设有 连接板,所述连接板上均铰接连杆一,所述连接杆一底端铰接连接杆二,两个所述连接杆二 中部铰接,所述连接杆二底部设有弧形夹板,一个所述连接杆二上设有固定块,所述固定块 顶部连接限位器,所述连接杆二上铰接卡爪,所述卡爪铰接端内部设有扭力弹簧,所述弧形 夹板上设有一段与卡爪适配的锯齿,两个所述弧形夹板底端设有一堆适配的詹式车钩。 作为改进,所述触发机构包括安装筒,所述安装筒顶端穿设推杆,所述推杆顶端固 定连接挂钩,底端固定连接U型板,所述U型板底部内侧均设有滑块,所述U型板内设有凸台, 所述凸台上设有与滑块适配的滑槽,所述滑槽为波浪形结构,所述凸台底部固定连接固定 杆,所述固定杆穿设安装筒,所述固定杆底端连接卡块,所述固定杆外侧套设套环,所述套 环固定连接在安装筒底部,所述套环内设有轴承。 作为改进,所述限位器侧面为U型结构,所述限位器顶部开口两侧均设有挡板,所 述卡块俯视为长方形结构。 作为改进,所述连接杆一共有两根,且结构、尺寸均相同,所述连接杆二共有两根, 且结构、尺寸均相同。 作为改进,所述弧形夹板内侧设有防滑片。 本发明与现有的技术相比的优点在于:通过控制无人机的高度,可以使推杆上下 3 CN 111547208 A 说 明 书 2/3 页 运动,通过滑块在滑槽内的移动,可以使凸台旋转,从而使卡块与限位器分离,从而可以使 弧形夹板将航行器夹紧,减少电控设备的使用,减少故障率,通过卡爪和锯齿可以给弧形夹 板一定的限位作用,保持弧形夹板的状态。本发明可以远离打捞船进行水下航行器的打捞, 通过机械控制实现航行器的夹紧,减少电控设备的使用,有效的降低了故障率,既可以在高 难度海况条件下使用,又保障了操作人员的人身安全。 附图说明 图1是本发明的夹持航行器前的状态图。 图2是本发明的夹持航行器时的状态图。 图3是本发明中触发机构的内部结构图。 图4是本发明中A出的放大图。 图5是本发明中限位器的侧视图。 图6是本发明中卡块的俯视图。 如图所示:1、无人机,2、带缆绳,3、吊环,4、挂钩,5、触发机构,5.1、安装筒,5.2、推 杆,5.3、U型板,5.4、滑块,5.5、凸台,5.6、滑槽,5.7、固定杆,5.8、卡块,5.9、套环,6、连接 板,7、连接杆一,8、连接杆二,8.1、弧形夹板,9、限位器,10、固定块,11、卡爪,12、锯齿,13、 扭力弹簧,14、詹式车钩。











