
技术摘要:
本发明公开了一种控制方法、装置、车辆及存储介质。该方法包括:采集四轮轮速;根据所述四轮轮速计算前后轴速差;当所述前后轴速差大于或者等于第一阈值时,根据所述前后轴速差调整设定扭矩分配系数;根据调整后的设定扭矩分配系数控制车辆;采集车辆的加速度;若所述 全部
背景技术:
目前涉及到纯电动领域的车辆脱困的方案不多,大多需要增加差速锁等物理结 构,或者利用滑移率等方式按照一定的预设关系或者查表来实现扭矩分配。有两个方案涉 及到混动汽车的扭矩分配方法。一个方案是:利用前后轴滑移错误系数通过查表得到前后 电机扭矩分配系数。缺点一是前后轴滑移错误系数需要用到实际车速,而实际车速在打滑 时很难计算也计算不准;缺点二是通过查表的方式来确定扭矩分配系数需要大量的标定工 作,并且适应性不强。另一个方案是通过计算轴间滑移率满足一定条件后按照预设关系进 行扭矩分配。缺点是只能按照预设关系进行扭矩分配,缺乏自动调节,并且适应性不强。
技术实现要素:
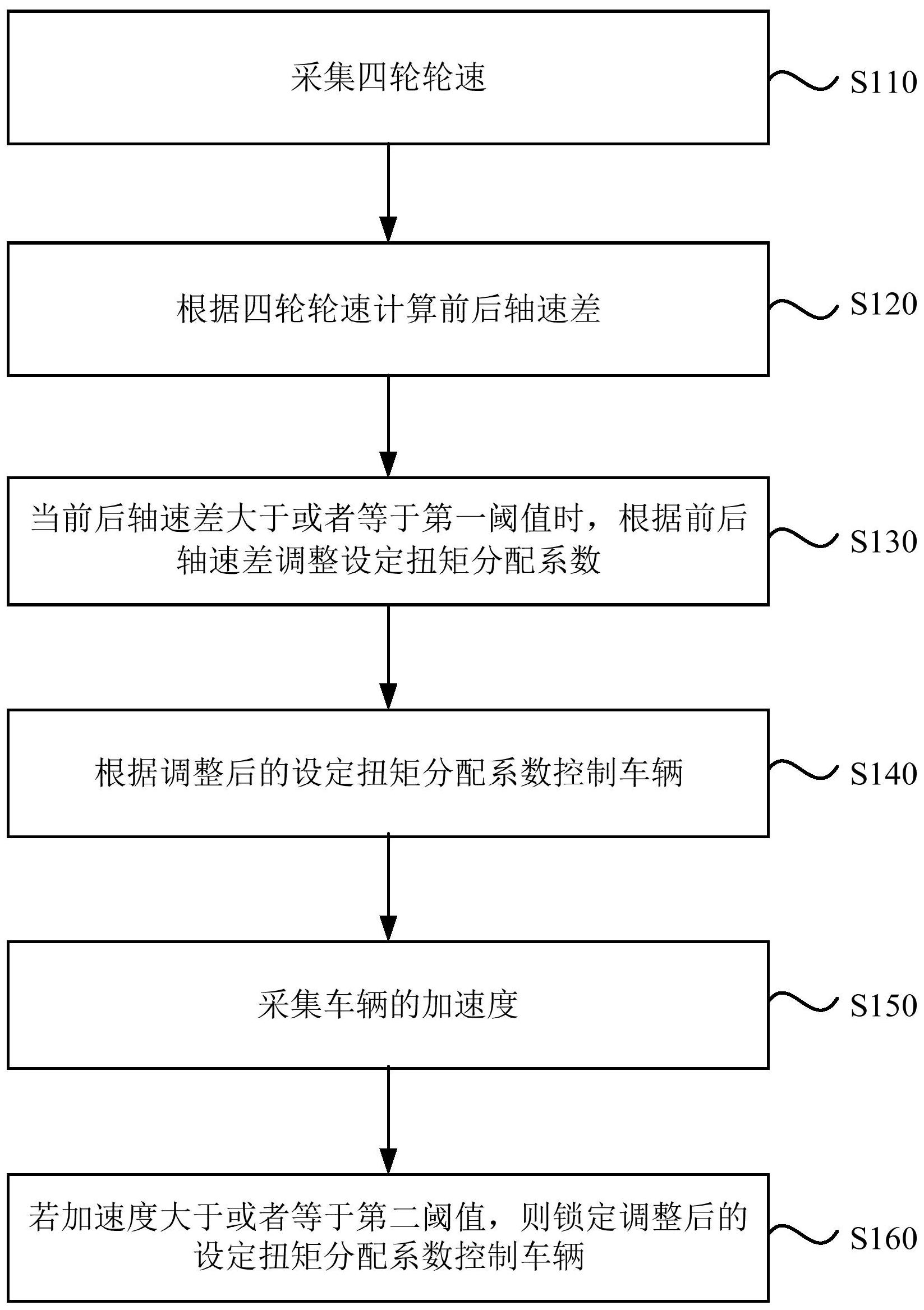
本发明实施例提供一种控制方法、装置、车辆及存储介质,解决纯电动四驱汽车在 路况不良地区行驶时脱困困难的问题,目的是利用纯电动四驱前后轴速差不同,前后在所 对应附着力也有所不同时,根据轴速差调节前后电机扭矩分配系数,并锁定最佳的脱困扭 矩分配系数,来进行车辆脱困,能够在不增加成本的情况下,可以最大限度的利用车辆本身 动力进行脱困。 第一方面,本发明实施例提供了一种控制方法,包括: 采集四轮轮速; 根据所述四轮轮速计算前后轴速差; 当所述前后轴速差大于或者等于第一阈值时,根据所述前后轴速差调整设定扭矩 分配系数; 根据调整后的设定扭矩分配系数控制车辆; 采集车辆的加速度; 若所述加速度大于第二阈值,则锁定所述调整后的设定扭矩分配系数控制车辆。 第二方面,本发明实施例还提供了一种控制装置,该装置包括: 第一采集模块,用于采集四轮轮速; 计算模块,用于根据所述四轮轮速计算前后轴速差; 调整模块,用于当所述前后轴速差大于或者等于第一阈值时,根据所述前后轴速 差调整设定扭矩分配系数; 第一控制模块,用于根据调整后的设定扭矩分配系数控制车辆; 第二采集模块,用于采集车辆的加速度; 第二控制模块,用于若所述加速度大于第二阈值,则锁定所述调整后的设定扭矩 分配系数控制车辆。 第三方面,本发明实施例还提供了一种车辆,包括存储器、处理器及存储在存储器 4 CN 111605413 A 说 明 书 2/7 页 上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如本发明实施例中 任一所述的控制方法。 第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机 程序,该程序被处理器执行时实现如本发明实施例中任一所述的控制方法。 本发明实施例通过采集四轮轮速;根据所述四轮轮速计算前后轴速差;当所述前 后轴速差大于或者等于第一阈值时,根据所述前后轴速差调整设定扭矩分配系数;根据调 整后的设定扭矩分配系数控制车辆;采集车辆的加速度;若所述加速度大于第二阈值,则锁 定所述调整后的设定扭矩分配系数控制车辆,解决纯电动四驱汽车在路况不良地区行驶时 脱困困难的问题,目的是利用纯电动四驱前后轴速差不同,前后在所对应附着力也有所不 同时,根据轴速差调节前后电机扭矩分配系数,并锁定最佳的脱困扭矩分配系数,来进行车 辆脱困,能够在不增加成本的情况下,可以最大限度的利用车辆本身动力进行脱困。 附图说明 为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附 图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对 范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这 些附图获得其他相关的附图。 图1A是本发明实施例一中的一种控制方法的流程图; 图1B是本发明实施例一中的通过调节扭矩分配系数控制车辆的图示; 图2是本发明实施例二中的一种控制装置的结构示意图; 图3是本发明实施例三中的一种车辆的结构示意图。











